RT-Thread STM32F429 armfly-v6开发板BSP说明
简介
本文档为 RT-Thread 开发团队为 STM32F429 armfly-v6 开发板提供的 BSP (板级支持包) 说明。
主要内容如下:
- 开发板资源介绍
- BSP 快速上手
- 进阶使用方法
通过阅读快速上手章节开发者可以快速地上手该 BSP,将 RT-Thread 运行在开发板上。在进阶使用指南章节,将会介绍更多高级功能,帮助开发者利用 RT-Thread 驱动更多板载资源。
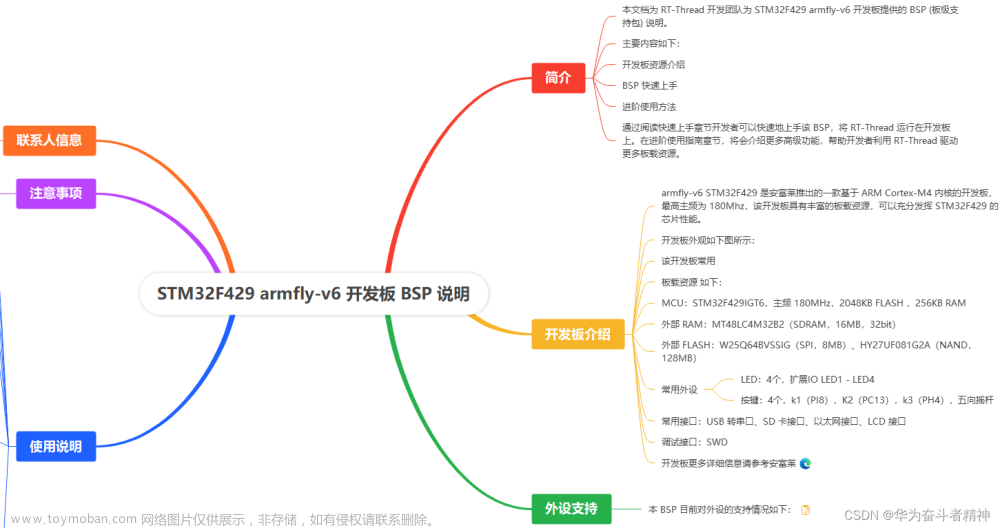
开发板介绍
armfly-v6 STM32F429 是安富莱推出的一款基于 ARM Cortex-M4 内核的开发板,最高主频为 180Mhz,该开发板具有丰富的板载资源,可以充分发挥 STM32F429 的芯片性能。
开发板外观如下图所示:
该开发板常用 板载资源 如下:
- MCU:STM32F429IGT6,主频 180MHz,2048KB FLASH ,256KB RAM
- 外部 RAM:MT48LC4M32B2(SDRAM,16MB,32bit)
- 外部 FLASH:W25Q64BVSSIG(SPI,8MB)、HY27UF081G2A(NAND,128MB)
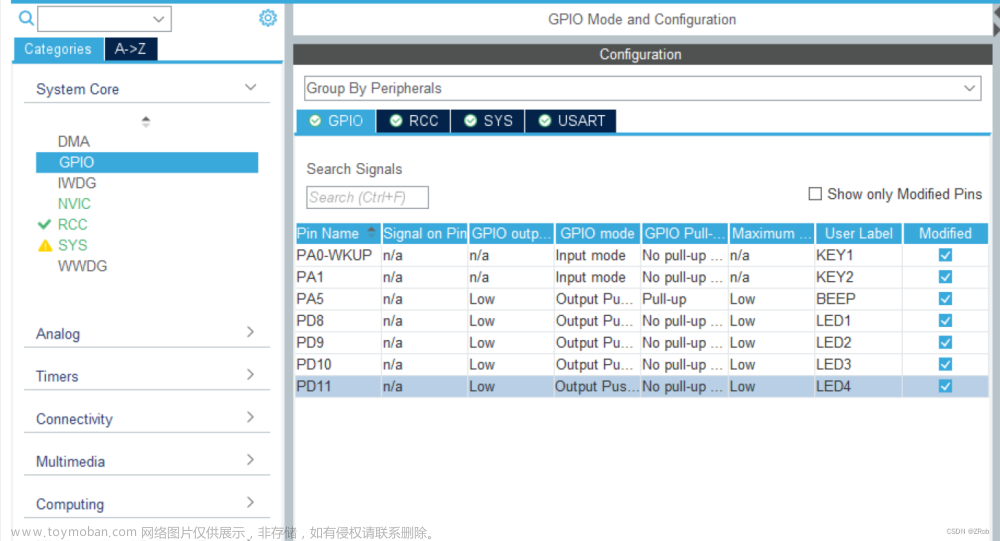
- 常用外设
- LED:4个,扩展IO LED1 - LED4
- 按键:4个,k1(PI8),K2(PC13),k3(PH4),五向摇杆
- 常用接口:USB 转串口、SD 卡接口、以太网接口、LCD 接口
- 调试接口:SWD
开发板更多详细信息请参考安富莱 STM32 v6 开发板介绍。
外设支持
本 BSP 目前对外设的支持情况如下:
| 板载外设 | 支持情况 | 备注 |
|---|---|---|
| USB 转串口 | 支持 | |
| 扩展IO | 支持 | |
| SPI Flash | 支持 | |
| 以太网 | 支持 | |
| MPU6050 | 支持 | |
| SDRAM | 支持 | |
| SD卡 | 支持 | |
| LCD | 支持 | 支持 RGB 屏 |
| CAN | 暂不支持 | |
| 片上外设 | 支持情况 | 备注 |
| GPIO | 支持 | PA0, PA1… PK15 —> PIN: 0, 1…176 |
| UART | 支持 | UART1 |
| SPI | 支持 | SPI1/2/5 |
| I2C | 支持 | 软件 I2C |
| ADC | 支持 | |
| RTC | 支持 | 支持外部晶振和内部低速时钟 |
| WDT | 支持 | |
| FLASH | 支持 | 已适配 FAL |
| SDIO | 支持 | |
| PWM | 支持 | |
| USB Device | 暂不支持 | 即将支持 |
| USB Host | 暂不支持 | 即将支持 |
| 扩展模块 | 支持情况 | 备注 |
| ad7606 | 暂不支持 |
使用说明
使用说明分为如下两个章节:
-
快速上手
本章节是为刚接触 RT-Thread 的新手准备的使用说明,遵循简单的步骤即可将 RT-Thread 操作系统运行在该开发板上,看到实验效果 。
-
进阶使用
本章节是为需要在 RT-Thread 操作系统上使用更多开发板资源的开发者准备的。通过使用 ENV 工具对 BSP 进行配置,可以开启更多板载资源,实现更多高级功能。
快速上手
本 BSP 为开发者提供 MDK4、MDK5 和 IAR 工程,并且支持 GCC 开发环境。下面以 MDK5 开发环境为例,介绍如何将系统运行起来。
硬件连接
使用数据线连接开发板到 PC,打开电源开关。
编译下载
双击 project.uvprojx 文件,打开 MDK5 工程,编译并下载程序到开发板。
工程默认配置使用 JLink 下载程序,在通过 JLink 连接开发板的基础上,点击下载按钮即可下载程序到开发板
运行结果
下载程序成功之后,系统会自动运行,观察开发板上 LED 的运行效果,LED2 - 4 常亮、LED1 会周期性闪烁。
连接开发板对应串口到 PC , 在终端工具里打开相应的串口(115200-8-1-N),复位设备后,可以看到 RT-Thread 的输出信息:
\ | /
- RT - Thread Operating System
/ | \ 3.1.1 build Nov 19 2018
2006 - 2018 Copyright by rt-thread team
msh >
进阶使用
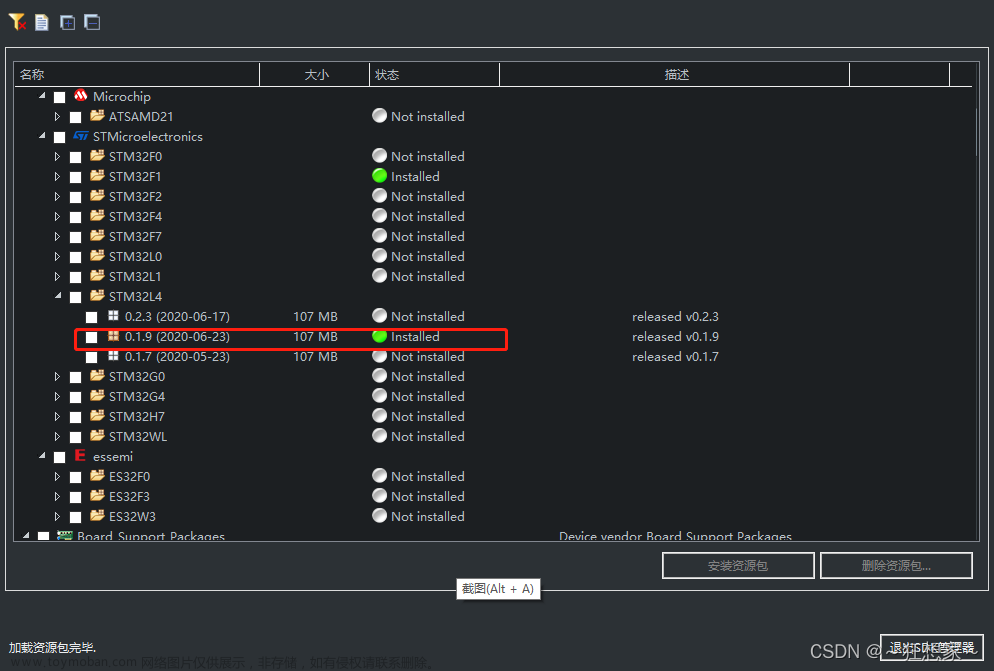
此 BSP 默认只开启了 GPIO 和 串口1 的功能,如果需使用 SD 卡、Flash 等更多高级功能,需要利用 ENV 工具对BSP 进行配置,步骤如下:
-
在 bsp 下打开 env 工具。
-
输入
menuconfig命令配置工程,配置好之后保存退出。 -
输入
pkgs --update命令更新软件包。 -
输入
scons --target=mdk4/mdk5/iar命令重新生成工程。
本章节更多详细的介绍请参考 STM32 系列 BSP 外设驱动使用教程。
注意事项
暂无
示例代码
…\components\finsh\cmd.c
#ifdef RT_USING_MAILBOX
long list_mailbox(void)
{
rt_base_t level;
list_get_next_t find_arg;
struct rt_object_information *info;
rt_list_t *obj_list[LIST_FIND_OBJ_NR];
rt_list_t *next = (rt_list_t *)RT_NULL;
int maxlen;
const char *item_title = "mailbox";
list_find_init(&find_arg, RT_Object_Class_MailBox, obj_list, sizeof(obj_list) / sizeof(obj_list[0]));
info = rt_list_entry(find_arg.list, struct rt_object_information, object_list);
maxlen = RT_NAME_MAX;
rt_kprintf("%-*.*s entry size suspend thread\n", maxlen, maxlen, item_title);
object_split(maxlen);
rt_kprintf(" ---- ---- --------------\n");
do
{
next = list_get_next(next, &find_arg);
{
int i;
for (i = 0; i < find_arg.nr_out; i++)
{
struct rt_object *obj;
struct rt_mailbox *m;
obj = rt_list_entry(obj_list[i], struct rt_object, list);
level = rt_spin_lock_irqsave(&info->spinlock);
if ((obj->type & ~RT_Object_Class_Static) != find_arg.type)
{
rt_spin_unlock_irqrestore(&info->spinlock, level);
continue;
}
rt_spin_unlock_irqrestore(&info->spinlock, level);
m = (struct rt_mailbox *)obj;
if (!rt_list_isempty(&m->parent.suspend_thread))
{
rt_kprintf("%-*.*s %04d %04d %d:",
maxlen, RT_NAME_MAX,
m->parent.parent.name,
m->entry,
m->size,
rt_list_len(&m->parent.suspend_thread));
show_wait_queue(&(m->parent.suspend_thread));
rt_kprintf("\n");
}
else
{
rt_kprintf("%-*.*s %04d %04d %d\n",
maxlen, RT_NAME_MAX,
m->parent.parent.name,
m->entry,
m->size,
rt_list_len(&m->parent.suspend_thread));
}
}
}
}
while (next != (rt_list_t *)RT_NULL);
return 0;
}
#endif /* RT_USING_MAILBOX */
#ifdef RT_USING_MESSAGEQUEUE
long list_msgqueue(void)
{
rt_base_t level;
list_get_next_t find_arg;
struct rt_object_information *info;
rt_list_t *obj_list[LIST_FIND_OBJ_NR];
rt_list_t *next = (rt_list_t *)RT_NULL;
int maxlen;
const char *item_title = "msgqueue";
list_find_init(&find_arg, RT_Object_Class_MessageQueue, obj_list, sizeof(obj_list) / sizeof(obj_list[0]));
info = rt_list_entry(find_arg.list, struct rt_object_information, object_list);
maxlen = RT_NAME_MAX;
rt_kprintf("%-*.*s entry suspend thread\n", maxlen, maxlen, item_title);
object_split(maxlen);
rt_kprintf(" ---- --------------\n");
do
{
next = list_get_next(next, &find_arg);
{
int i;
for (i = 0; i < find_arg.nr_out; i++)
{
struct rt_object *obj;
struct rt_messagequeue *m;
obj = rt_list_entry(obj_list[i], struct rt_object, list);
level = rt_spin_lock_irqsave(&info->spinlock);
if ((obj->type & ~RT_Object_Class_Static) != find_arg.type)
{
rt_spin_unlock_irqrestore(&info->spinlock, level);
continue;
}
rt_spin_unlock_irqrestore(&info->spinlock, level);
m = (struct rt_messagequeue *)obj;
if (!rt_list_isempty(&m->parent.suspend_thread))
{
rt_kprintf("%-*.*s %04d %d:",
maxlen, RT_NAME_MAX,
m->parent.parent.name,
m->entry,
rt_list_len(&m->parent.suspend_thread));
show_wait_queue(&(m->parent.suspend_thread));
rt_kprintf("\n");
}
else
{
rt_kprintf("%-*.*s %04d %d\n",
maxlen, RT_NAME_MAX,
m->parent.parent.name,
m->entry,
rt_list_len(&m->parent.suspend_thread));
}
}
}
}
while (next != (rt_list_t *)RT_NULL);
return 0;
}
#endif /* RT_USING_MESSAGEQUEUE */
#ifdef RT_USING_MEMHEAP
long list_memheap(void)
{
rt_base_t level;
list_get_next_t find_arg;
struct rt_object_information *info;
rt_list_t *obj_list[LIST_FIND_OBJ_NR];
rt_list_t *next = (rt_list_t *)RT_NULL;
int maxlen;
const char *item_title = "memheap";
list_find_init(&find_arg, RT_Object_Class_MemHeap, obj_list, sizeof(obj_list) / sizeof(obj_list[0]));
info = rt_list_entry(find_arg.list, struct rt_object_information, object_list);
maxlen = RT_NAME_MAX;
rt_kprintf("%-*.*s pool size max used size available size\n", maxlen, maxlen, item_title);
object_split(maxlen);
rt_kprintf(" ---------- ------------- --------------\n");
do
{
next = list_get_next(next, &find_arg);
{
int i;
for (i = 0; i < find_arg.nr_out; i++)
{
struct rt_object *obj;
struct rt_memheap *mh;
obj = rt_list_entry(obj_list[i], struct rt_object, list);
level = rt_spin_lock_irqsave(&info->spinlock);
if ((obj->type & ~RT_Object_Class_Static) != find_arg.type)
{
rt_spin_unlock_irqrestore(&info->spinlock, level);
continue;
}
rt_spin_unlock_irqrestore(&info->spinlock, level);
mh = (struct rt_memheap *)obj;
rt_kprintf("%-*.*s %-010d %-013d %-05d\n",
maxlen, RT_NAME_MAX,
mh->parent.name,
mh->pool_size,
mh->max_used_size,
mh->available_size);
}
}
}
while (next != (rt_list_t *)RT_NULL);
return 0;
}
#endif /* RT_USING_MEMHEAP */
源码下载
…\bsp\stm32\stm32f429-armfly-v6\project.uvproj
 文章来源:https://www.toymoban.com/news/detail-800683.html
文章来源:https://www.toymoban.com/news/detail-800683.html
RT-Thread STM32F429 armfly-v6开发板BSP说明 源码下载文章来源地址https://www.toymoban.com/news/detail-800683.html
维护人:
- 华为奋斗者精神, 邮箱:1992152446@qq.com
到了这里,关于RT-Thread STM32F429 armfly-v6开发板BSP说明的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!