栅极驱动参考
1.PWM直接驱动
2.双极Totem-Pole驱动器
3.MOSFET Totem-Pole驱动器
4.速度增强电路
5.dv/dt保护
1.PWM直接驱动
在电源应用中,驱动主开关晶体管栅极的最简单方法是利用 PWM 控制其直接控制栅极,如 图 8 所示。
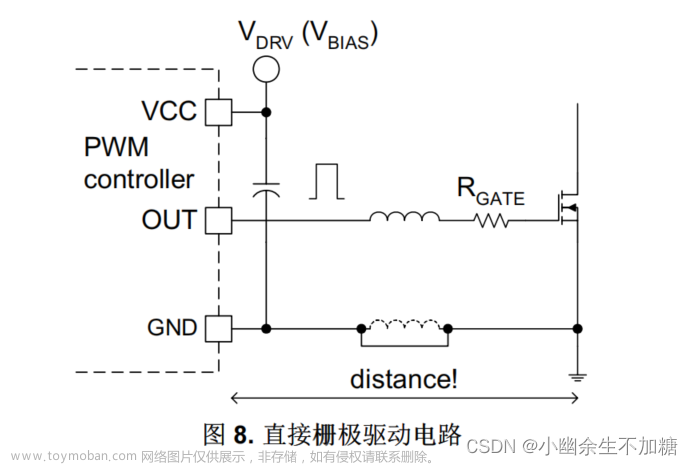
直接栅极驱动最艰巨的任务是优化电路布局。
如 图 8 中所示,PWM 控制器和 MOSFET 之间可能有较大距离。由于栅极驱动和接地环路形成的环路,这个距离形成了寄生电感,从而降低了开关速度,并导致栅极驱动波形中形成振铃。
接地平面,也无法完全消除电感,因为接地平面只为接地环路电流提供较低电感路径。
为了降低与栅极驱动连接相关的电感,需要更宽的 PCB 走线。
直接栅极驱动的另一个问题是PWM 控制器的驱动电流能力有限。极少有集成电路能提供高于 1A 的峰值栅极驱动能力。这会限制控制器在合理的开关速度下可驱动的最大MOS封装。
直接栅极驱动的另一个限制因素是控制器内驱动器的功率损耗。如前面所述,外部栅极电阻器可以缓解此问题。当为了节约空间或成本而必须使用直接栅极驱动时,需要考虑特殊注意事项,以便为控制器提供合适的旁路。
驱动 MOSFET 栅极的高电流峰值会破坏 PWM 控制器内敏感的模拟电路。随着 MOSFET 封装尺寸增加,所需的栅极电荷也会增加。与选择普通 0.1µF 或 1μF 旁路电容器相比,选择合适的旁路电容器需要采用更加科学的方法,例如仿真计算。
(1)确认旁路电容的大小
本节将介绍 MOSFET 栅极驱动器的旁路电容器的计算。此电容器与直接栅极驱动应用中的 PWM 控制器的旁路电容器相同,因为此电容器在开通时提供栅极驱动电流。如果是独立的驱动器电路,无论采用栅极驱动IC 还是分立解决方案,此电容器都必须置于附近,最好直接置于驱动器的偏置和地连接上。
需要考虑两种电流分量。一种是静态电流,这种电流可根据某些集成驱动器的输入状态变化 10 倍。这可导致占空比变化,具体取决于旁路电容器上的纹波电压,计算方法如 公式 16 中所示。

另一个纹波分量是栅极电流。虽然大多数情况下并不知道实际电流振幅,但可根据栅极电荷值确定旁路电容器上的纹波电压。在开通时,此电荷离开旁路电容器,并传递到MOSFET 输入电容器中。相应的纹波电压如 公式 17 中所示。

使用叠加 CDRV 方程的原理,可采用 公式 18 找到耐受的纹波电压 (ΔV) 的旁路电容值。

(2)驱动器的保护
对于直接驱动和使用双极输出极的栅极驱动 IC,必须做的另一件事就是为输出双极晶体管提供合适的保护,防止反向电流的形成。如 图 9 中所示,集成双极驱动器的输出极由 NPN 晶体管构成,因为其空间利用率更高效,性能更优异。

NPN 晶体管只能在一个方向上处理电流。高侧 NPN 可以拉电流,但不能灌电流,而低侧 NPN 则恰好相反。在开关期间,MOSFET 的源极电感器和输入电容器之间不可避免地会形成振荡,因此电流必须能够在驱动器输出端双向流动。为了提供反向电流的路径,通常需要使用低正向压降肖特基二极管来保护输出。该二极管必须放在非常靠近输出引脚和驱动器旁路电容器的位置。还要指出的是,该二极管只能保护驱动器,而不能钳位栅源极电压,防止过度的振铃,特别是对于控制 IC 可能离 MOSFET 的栅-源端子较远时的直接驱动更是如此。
2.双极Totem-Pole驱动器
双极同相Totem-Pole驱动器是用于驱动 MOSFET 的其中一个最常用且具有成本效益的驱动电路,如图10所示:

和所有外部驱动器一样,此电路可处理应对电流尖峰和功率损耗,从而使得运行条件更有利于 PWM 控制器。当然,它们可以并且应当置于所驱动的功率 MOSFET 的旁边。这样,驱动栅极的高电流瞬态被限制在非常小的环路区域,从而减小了寄生电感的值。虽然驱动器由分立式组件构成,但它需要将自己的旁路电容器置于上 NPN 和下 PNP 晶体管的集电极上。理想情况下,在驱动器的旁路电容器和 PWM 控制器的旁路电容器之间应设置一个平滑电阻器或电感器,以提高抗噪性。图 10 中的 RGATE 电阻器是可选的,可调整 RB的大小以根据驱动器晶体管的大信号 Beta 提供所需的栅极阻抗。
双极Totem-Pole 驱动器有一个有趣的特性,即两个基极-发射极结可防止互相反向击穿。而且,假定环路区域非常小且 RGATE 可以忽略,则可使用晶体管的基极-发射极二极管将栅极电压钳制在 VBIAS+VBE 和 GND-VBE 之间。基于相同的钳位机制,此解决方案还有另一个好处,那就是 NPN-PNP Totem-Pole 驱动器不需要使用任何肖特基二极管来实现反向电流保护。
3.MOSFET Totem-Pole驱动器
图 11 展示了等效于双极 Totem-Pole 驱动器的 MOSFET Totem-Pole 驱动器。上文所述的有关双极Totem-Pole驱动器的所有优点同样适用于此实现。
如图所示:
遗憾的是,与双极驱动器相比,此电路有几个缺点,因此很少以分立器件的形式实现。图 11 中的电路是反相驱动器,因此 PWM 输出信号必须为反相。此外,适用的 MOSFET 晶体管比双极晶体管昂贵,并且当共栅极电压转换时,会产生较大的击穿电流。这个问题可通过增加逻辑或时序组件来规避,此方法广泛应用于IC 实施中。
4.速度增强回路
提到速度增强电路时,设计人员需要对加快 MOSFET 关断过程的电路进行专门研究。原因在于开通速度通常受到电源中整流器组件**(二极管)的关断过程或反向恢复速度的限制**。
正如前面所讨论的 图 3 中所示的电感钳位模型,MOSFET 的开通与整流器二极管的关断同时发生。因此,最快的开关操作由二极管的反向恢复特性决定,而不是栅极驱动电路的强度。在优化的设计中,开通时的栅极驱动速度与二极管开关特性一致。同时考虑到与最终栅极驱动电压 VDRV 相比米勒区域更接近于 GND,因此可在驱动器输出阻抗和栅极电阻器上施加更高的电压。通常获得的开通速度足以驱动 MOSFET。
而在关断时情况截然不同。从理论上说,MOSFET 的关断速度只取决于栅极驱动电路。电流更高的关断电路可以更快对输入电容器放电,从而缩短开关时间,进而降低开关损耗。如果使用普通的 N 沟道器件,通过更低输出阻抗的 MOSFET 驱动器和/或负关断电压,可以增大放电电流。而提高开关速度有可能会降低开关损耗,由于 MOSFET 的关断 di/dt 和 dv/dt 更高,因此关断加速电路会在波形中增加振铃。在为电源器件选择合适的电压额定值和 EMI 屏蔽装置时,应考虑这一因素。
(1)关断二极管
以下关断电路示例通过简单的接地基准栅极驱动电路进行展示,不过这些示例同样适用于其他情况。最简单的技术是反向并联二极管,如 图 12 所示。

在此电路中,RGATE 允许调整 MOSFET 开通速度。在关断过程中,反向并联二极管会对电阻器进行分流。DOFF 只有在栅极电流高于 公式 19 所示的结果时起作用。

使用 1N4148 通常大约为 150mA,使用 BAS40 肖特基反向并联二极管大约为 300mA。因此,随着栅源极电压接近 0V,二极管的作用越来越小。所以,此电路能显著减少关断延迟时间,但只会增量化改进开关时间和 dv/dt 抗扰性。另一个缺点是,栅极关断电流仍然必须流经驱动器的输出阻抗。
(2)PNP关断电路
毫无疑问,快速关断电路最常用的布局是 图 13 中所示的局部 PNP 关断电路。在 QOFF 的帮助下,在关断期间栅极和源极在 MOSFET 端子处形成局部短路。RGATE 限制开通速度,DON 为开通电流提供路径。而且,DON 可以保护 QOFF 的基极-发射极结,防止在开通过程开始时出现反向击穿。

**关断电流不会返回驱动器,不会导致误开通问题,并且驱动器的功率损耗也减少了两倍。**关断晶体管对栅极驱动环路电感、电势电流感应电阻器和驱动器的输出阻抗进行分流。而且,QOFF 永远不会达到饱和,这一点对于保障快速开关能力非常重要。
通过详细了解电路我们可以发现,此解决方案是一个简化的双极Totem-Pole 驱动器,其中二极管替代了 NPN 上拉晶体管。与Totem-Pole 驱动器相似,MOSFET 栅极被关断电路钳制在大约 GND-0.7V 到 VDRV+0.7V 之间,从而消除了栅极电压应力过高的风险。
该电路唯一一个已知的缺点是,由于 QOFF 的基极-发射极结上的压降,它始终不能将栅极拉至 0V。
(3)NPN关断电路
要评估的下一个电路是局部 NPN 关断电路,如 图 14 所示。与 PNP 解决方案相似,栅极放电电流有效地控制在局部。与 PNP 晶体管相比,NPN 晶体管能够使栅极更接近于 GND。而且,此实现可提供自偏置机制,使 MOSFET 在上电期间保持关断状态。

遗憾的是,此电路有几个明显缺点。NPN 关断晶体管 QOFF 为反相级,需要 QINV 提供的反相 PWM 信号。
反相器在 MOSFET 导通时会消耗驱动器中的电流,因此降低了电路效率。而且,QINV 在导通时达到饱和状态,这会延长栅极驱动中的关断延时。
(4)NMOS关断电路
图 15 依据此原理改进了实施,减少了器件数,使用双驱动器为小型 N 沟道放电晶体管提供反相 PWM 信号。

此电路可提供非常快的开关速度,可将 MOSFET 栅极完全放电至 0V。RGATE 不但能像以前一样设置开通速度,还可用于在驱动信号时序有缺陷时防止在驱动器两个输出之间形成击穿电流。要考虑的另一个重要因素是,QOFF 的 COSS 电容与主功率 MOSFET 的 CISS 电容并联。这会增加驱动器需要提供的有效“总栅极电荷”。还要考虑,在驱动器 IC 的输出在上电过程中实现智能化之前,主 MOSFET 的栅极处于悬空状态。
5.dv/dt保护
在两种情况下,MOSFET 需要防止 dv/dt 触发开通。一种情况是在上电过程中,通常通过在器件的栅极和源极端子间加入一个电阻器来提供保护。根据 公式 20 可知,下拉电阻器的值取决于最差的情况下上电过程中电源轨的 dv/dt。
在此计算中,最大的难题是找到上电过程中可能产生的最大 dv/dt 并针对该特定 dv/dt 提供充足保护。
第二种情况是正常运行中,当电源关断时在电源开关的漏源极端子上施加关断 dv/dt 时。这种情况比原先预想的更常见。所有同步整流器开关均运行在此模式下,此内容将在后面继续进行讨论。多数谐振和软开关转换器可以在关断实例后立即在主开关上施加 dv/dt,由功率级谐振元件驱动。由于工作结温升高,与上电过程中相比这些 dv/dt 明显升高并且VTH 通常下降,因此必须由栅极驱动电路的低输出阻抗提供保护。
首要任务是确定在最坏情况下可产生的最大 dv/dt。在评估特定器件对于应用的适用性时,下一步是计算自然 dv/dt 极限,该极限由 MOSFET 的内部栅极电阻和 CGD 电容决定。假定在理想的 (0 Ω) 外部驱动阻抗下,自然 dv/dt 极限如 公式 21 所示。
**如果 MOSFET 的自然 dv/dt 极限低于谐振电路的最大 dv/dt,则必须考虑使用一个不同 MOSFET 或负栅极偏置电压。**如果结果对器件有利,可根据 公式 22 重新排列和求解以前的方程来计算最大栅极驱动阻抗。

当给定最大下拉电阻值时,可以实施栅极驱动设计。应该考虑到,驱动器的下拉阻抗也与温度有关。结温升高时,基于 MOSFET 的栅极驱动 IC 的输出电阻会高于 25°C 时通常所呈现的典型值。
关断速度增强电路还可用于满足 MOSFET 的 dv/dt 抗扰性,因为它们可以在关断时和器件的关断状态下分流 RGATE。例如,图 13 所示的简单 PNP 关断电路可以提高 MOSFET 的最大 dv/dt。根据 PNP 晶体管的Beta 影响修改的公式会产生更大的 dv/dt 额定值,如 公式 23 所示。
 文章来源:https://www.toymoban.com/news/detail-801148.html
文章来源:https://www.toymoban.com/news/detail-801148.html
在 dv/dt 计算中,回程系数是 MOSFET 的内部栅极电阻,所有数据手册中均未定义该值。之前提到过,此电阻取决于半导体内分配栅极信号所用的材料属性、单元密度和单元设计。文章来源地址https://www.toymoban.com/news/detail-801148.html
到了这里,关于MOSFET 和 IGBT 栅极驱动器电路的基本原理学习笔记(二)栅极驱动参考的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!