1、功能介绍
蓝牙切换功能:智能小车内置了蓝牙模块,可以通过手机或其他蓝牙设备与之连接。用户可以通过手机发送指令控制小车的运动方向,实现远程控制。
循迹功能:智能小车配备了红外线传感器,可以实现循迹功能。通过检测地面上的黑线或白线,小车能够自动沿着线路行驶,实现自动导航功能。
1.硬件准备
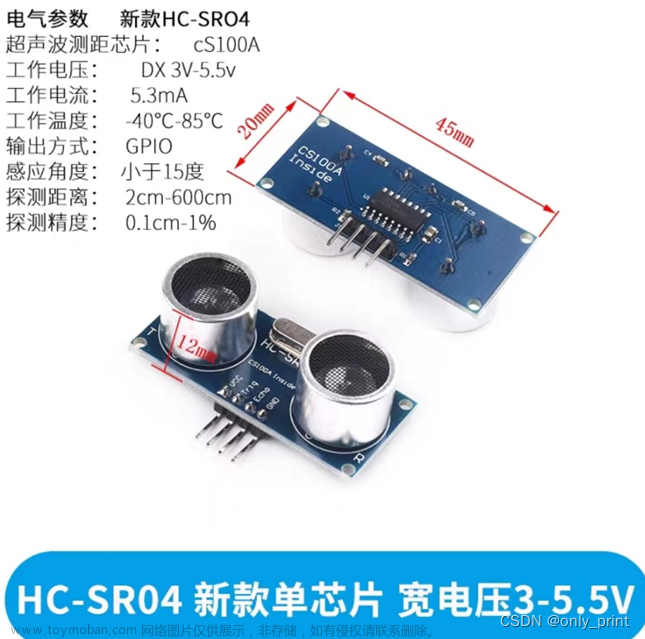
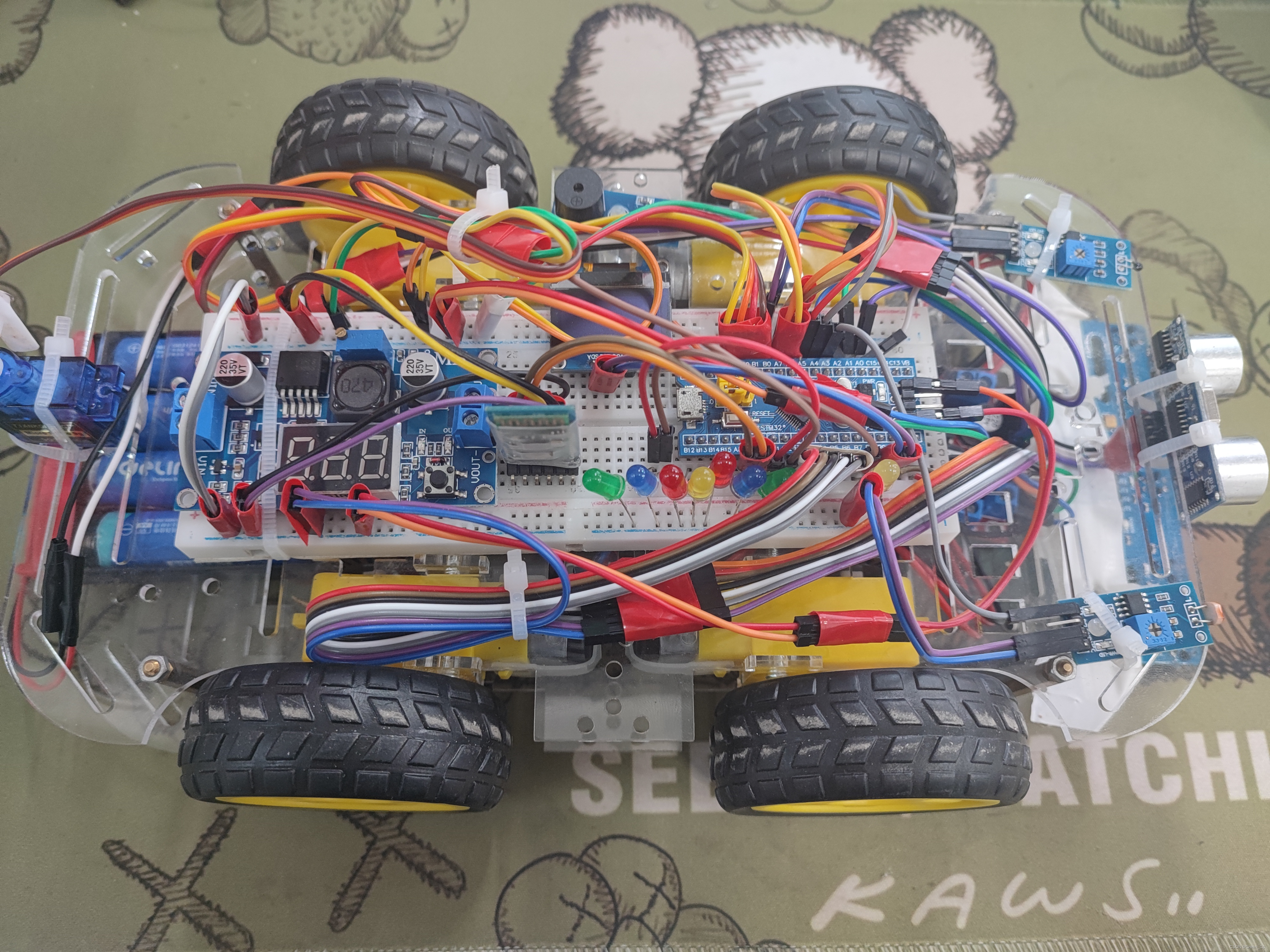
小车底盘一个(两驱),5号4节电池盒一个,STM32f103c8t6最小系统板,红外光电反射传感器两个,ST-LINK下载器,HC-05蓝牙模块、CH340模块、L298N电机驱动模块,焊接设备、一些杜邦线、也可以再准备一个面包板。
硬件搭设

硬件及程序
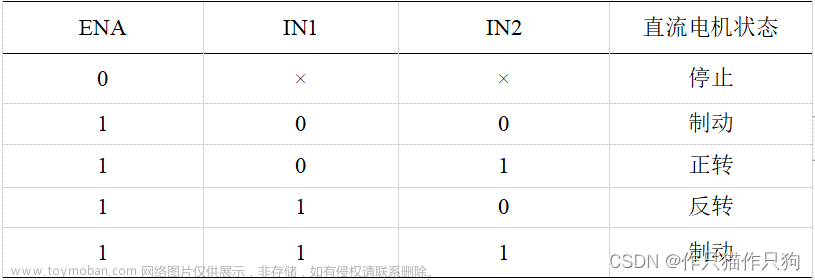
1.电机驱动

1.主电源正极接12v,主电源负极接GND。
2.先将5V的跳线帽短接,这样不用额外通过5V输入端外加电源在给单片机供电,可直接有5V输入端连接导线直接给单片机供电,如不将跳线帽短接,则5V输入端输出的电压为12V,连接单片机会导致单片机烧毁
3.A相使能,B相使能是对输入1.2.3.4的控制,如果使能A和使能B加上跳线帽的话,则只需要通过控制输入1.2(一个电机),3.4(另外一个电机)分别给两个电机的两端0和1实现正反转,都给0或者都给1则电机不会转,如果使能A和使能B不加上跳线帽的话,当AB为低电平时,输入1.2.3.4都不会工作,所以可以通过控制使能A和使能B的开和关的周期来控制产生PWM波。
2.小车运动
- 当IN1、IN3为高电平,IN2、IN4为低电平时,电机正转
- 当IN1、IN3为低电平,IN2、IN4为高电平时,电机反转
- 都为高电平时,电机不转
- 电机的正转和反转与跟电机的接线不同而不同,注意自己调试
motor.c
#include "stm32f10x.h"
#include "pwm.h"
void motor_init()
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//2.设置GPIO模式
//PB12~PB15 通用推挽输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7 |GPIO_Pin_8 |GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
PWM_Init();
}
void car_go()
{
//左轮
GPIO_SetBits( GPIOA, GPIO_Pin_6);
GPIO_ResetBits( GPIOA,GPIO_Pin_7);
TIM_SetCompare3(TIM3, 90 );
//右轮
GPIO_SetBits( GPIOA, GPIO_Pin_8);
GPIO_ResetBits( GPIOA,GPIO_Pin_11);
TIM_SetCompare4(TIM3, 90 );
}
void car_back()
{
//左轮
GPIO_ResetBits( GPIOA, GPIO_Pin_6);
GPIO_SetBits( GPIOA,GPIO_Pin_7);
TIM_SetCompare3(TIM3, 90 );
//右轮
GPIO_ResetBits( GPIOA, GPIO_Pin_8);
GPIO_SetBits( GPIOA,GPIO_Pin_11);
TIM_SetCompare4(TIM3, 90 );
}
void car_right()
{
//左轮
GPIO_ResetBits( GPIOA, GPIO_Pin_6);
GPIO_ResetBits( GPIOA,GPIO_Pin_7);
TIM_SetCompare3(TIM3, 90 );
//右轮
GPIO_SetBits( GPIOA, GPIO_Pin_8);
GPIO_ResetBits( GPIOA,GPIO_Pin_11);
TIM_SetCompare4(TIM3, 75);
}
void car_left ()
{
//左轮
GPIO_SetBits( GPIOA, GPIO_Pin_6);
GPIO_ResetBits( GPIOA,GPIO_Pin_7);
TIM_SetCompare3(TIM3, 75 );
//右轮
GPIO_ResetBits( GPIOA, GPIO_Pin_8);
GPIO_ResetBits( GPIOA,GPIO_Pin_11);
TIM_SetCompare4(TIM3, 90 );
}
void car_stop ()
{
//左轮
GPIO_ResetBits( GPIOA, GPIO_Pin_6);
GPIO_ResetBits( GPIOA,GPIO_Pin_7);
//右轮
GPIO_ResetBits( GPIOA, GPIO_Pin_8);
GPIO_ResetBits( GPIOA,GPIO_Pin_11);
}
pwm.c
#include "stm32f10x.h"
void PWM_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
//1.打开时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
//PB8,PB9 复用推挽输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//初始化TIM4 100us
TIM_InternalClockConfig(TIM3);
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 36 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);
//初始化PWM波形
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0; //CCR
TIM_OC3Init(TIM3, &TIM_OCInitStructure);//初始化右轮
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 36 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0; //CCR
TIM_OC4Init(TIM3, &TIM_OCInitStructure);//初始化左轮
//使能定时器
TIM_Cmd(TIM3, ENABLE);
}
void PWM_SetCompare3(uint16_t Compare)
{
TIM_SetCompare3(TIM3, Compare);
}
void PWM_SetCompare4(uint16_t Compare)
{
TIM_SetCompare3(TIM3, Compare);
}
2.循迹模块

循迹模块通常具有两个红外传感器,可以通过连接线将其与单片机的GPIO口相连。确保连接正确且稳固。首先,初始化单片机的相关引脚,并设置为输入模式。然后,循迹模块的红外传感器将会输出高低电平信号,根据这些信号判断当前位置是否在黑线上。可以使用if语句或逻辑判断来处理不同的情况,例如当传感器检测到黑线时小车继续前进,当传感器检测到白线时小车停止或转向等。
track.c
#include "stm32f10x.h"
#include "motor.h"
#define track_left GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_6)
#define track_right GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_8)
void track_Init(){
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
void track(){
if(track_left==0 && track_right==0 ){
car_go();
}
else if(track_left==1 && track_right==0){
car_left();
}
else if(track_left==0 && track_right==1){
car_right();
}
else {
car_stop();
}
}
3.蓝牙模块
蓝牙模块的前期调试,可用usb转ttl模块连接蓝牙模块,RXD-TX TXD-RX VCC-VCC GND-GND。
如果上电了,蓝牙指示灯默认是2s闪烁就是进入了AT指令模式,可通过上位机向蓝牙发送指令。如果上电不是AT指令模式,就摁着蓝牙的按键再上电。
AT指令集(建议改名字就好,密码不要改)
AT+NAME=Bluetooth-Master 蓝牙主机名称为Bluetooth-Master
AT+ROLE=1 蓝牙模式为主模式
AT+CMODE=0 蓝牙连接模式为任意地址连接模式
AT+PSWD=1234 蓝牙配对密码为1234
AT+UART=9600,0,0 蓝牙通信串口波特率为9600,停止位1位,无校验位
AT+RMAAD 清空配对列表
usart.c
#include "stm32f10x.h"
#include "usart.h"
#include "pwm.h"
#include "motor.h"
#include "track.h"
//
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
#if EN_USART1_RX //如果使能了接收
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=0; //接收状态标记
void usart_Init(void)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_USART1, ENABLE); //使能USART1,GPIOA时钟
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = 9600;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE);
}
#endif
void USART1_IRQHandler(void)
{
int res;
if(USART_GetITStatus( USART1, USART_IT_RXNE)==SET)
res=USART_ReceiveData(USART1);
switch(res){
case '1': car_go();break;
case '2': car_back();break;
case '3': car_left();break;
case '4': car_right();break;
case '5': car_stop();break;
USART_ClearITPendingBit( USART1, USART_IT_RXNE);
}
}
usart.h
#ifndef __USART_H
#define __USART_H
#include "stdio.h"
#include "stm32f10x.h"
#define USART_REC_LEN 200 //定义最大接收字节数 200
#define EN_USART1_RX 1 //使能(1)/禁止(0)串口1接收
extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
extern u16 USART_RX_STA; //接收状态标记
//如果想串口中断接收,请不要注释以下宏定义
void uart_init();
#endif
Delay.c
#include "stm32f10x.h"
/**
* @brief 微秒级延时
* @param xus 延时时长,范围:0~233015
* @retval 无
*/
void Delay_us(uint32_t xus)
{
SysTick->LOAD = 72 * xus; //设置定时器重装值
SysTick->VAL = 0x00; //清空当前计数值
SysTick->CTRL = 0x00000005; //设置时钟源为HCLK,启动定时器
while(!(SysTick->CTRL & 0x00010000)); //等待计数到0
SysTick->CTRL = 0x00000004; //关闭定时器
}
/**
* @brief 毫秒级延时
* @param xms 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_ms(uint32_t xms)
{
while(xms--)
{
Delay_us(1000);
}
}
/**
* @brief 秒级延时
* @param xs 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_s(uint32_t xs)
{
while(xs--)
{
Delay_ms(1000);
}
}
main.c文章来源:https://www.toymoban.com/news/detail-803496.html
#include "stm32f10x.h"
#include "Delay.h"
#include "motor.h"
#include "pwm.h"
#include "track.h"
#include "usart.h"
#define key GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_3)
uint8_t Speed;
void delay_s(int s);
void USART1_IRQHandler(void);
void usart_Init();
void delay_s(int s)
{
uint8_t b;
for( b = s;b>0;b--)
{
delay_ms(1000);
}
}
int main(void)
{
motor_init();
usart_Init();
track_Init();
while(1)
{
if(key==0)
{
USART1_IRQHandler();
}
else
{
track();
}
}
}
文章来源地址https://www.toymoban.com/news/detail-803496.html
到了这里,关于智能小车STM32——蓝牙循迹的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!




![[STM32F103C8T6]基于stm32的循迹,跟随,避障智能小车](https://imgs.yssmx.com/Uploads/2024/02/533808-1.png)