前言
在之前我们学习了flash闪存,这个更多的是内部数据存储,容量也是会比较小。这次我们来学习一下更多的存储单元w25q16,顺便了解spi———串行外围设备接口。
一、W25Q16
1.介绍
在我们的核心板子上基本都会有这么一块芯片,只是有的容量会计较大,大家可以查看板子的原理图,如图所示:
有的板子可能是w25q32或者其他,后面的数字代表的是容量,用法都是一样的,从图中或者产品手册我们可以看到芯片是spi协议通信的。
2.SPI
2.1. 简介
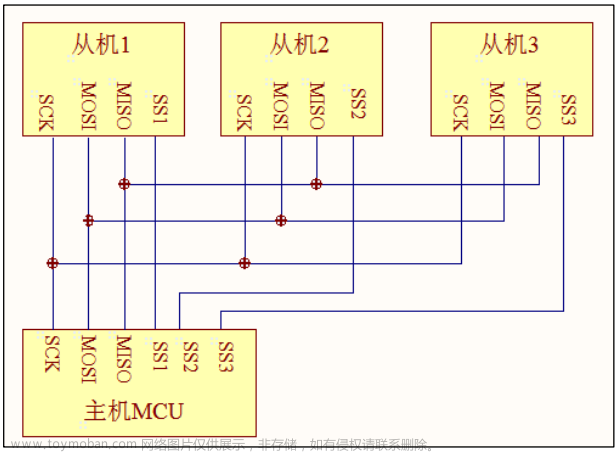
串行外设接口 (SPI) 可与外部器件进行半双工/全双工的同步串行通信。该接口可配置为主模式,在这种情况下,它可为外部从器件提供通信时钟 (SCK)。该接口还能够在多主模式配置 下工作。
它可用于多种用途,包括基于双线的单工同步传输,其中一条可作为双向数据线,或使用CRC 校验实现可靠通信。
2.2. 特性
● 基于三条线的全双工同步传输
● 基于双线的单工同步传输,其中一条可作为双向数据线
● 8 位或 16 位传输帧格式选择
● 主模式或从模式操作
● 多主模式功能
● 8 个主模式波特率预分频器(最大值为 fPCLK/2)
● 从模式频率(最大值为 fPCLK/2)
● 对于主模式和从模式都可实现更快的通信
● 对于主模式和从模式都可通过硬件或软件进行 NSS 管理:动态切换主/从操作
● 可编程的时钟极性和相位
● 可编程的数据顺序,最先移位 MSB 或 LSB
● 可触发中断的专用发送和接收标志
● SPI 总线忙状态标志
● SPI TI 模式
● 用于确保可靠通信的硬件 CRC 功能:
— 在发送模式下可将 CRC 值作为最后一个字节发送
— 根据收到的最后一个字节自动进行 CRC 错误校验
● 可触发中断的主模式故障、上溢和 CRC 错误标志
● 具有 DMA 功能的 1 字节发送和接收缓冲器:发送和接收请求
2.3. 功能说明

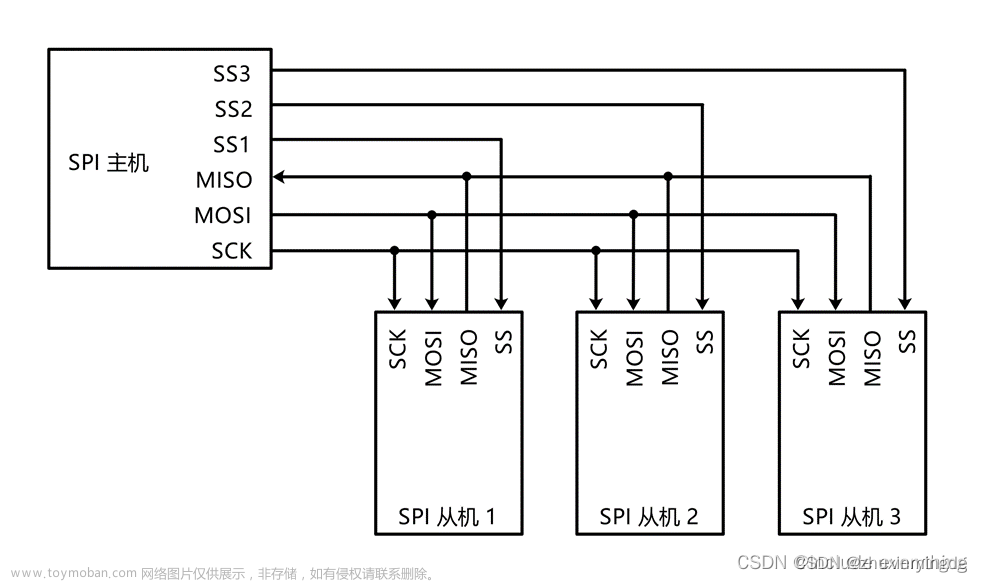
通常,SPI 通过 4 个引脚与外部器件连接:
● MISO:主输入/从输出数据。此引脚可用于在从模式下发送数据和在主模式下接收数据。
● MOSI:主输出/从输入数据。此引脚可用于在主模式下发送数据和在从模式下接收数据。
● SCK:用于 SPI 主器件的串行时钟输出以及 SPI 从器件的串行时钟输入。
● NSS:从器件选择。这是用于选择从器件的可选引脚。
2.4. 工作模式
SPI总线有四种工作方式,其中使用的最为广泛的是模式0和模式3方式。
CPOL(Clock Polarity):时钟极性选择,为0时SPI总线空闲时,时钟线为低电平 ;为1时SPI总线空闲时,时钟线为高电平。
CPHA(Clock Phase):时钟相位选择,为0时在SCLK第一个跳变沿,主机对MISO引脚电平采样;为1时在SCLK第二个跳变沿,主机对MISO引脚电平采样。

2.5. 引脚说明

二、代码开发
1.SPI初始化
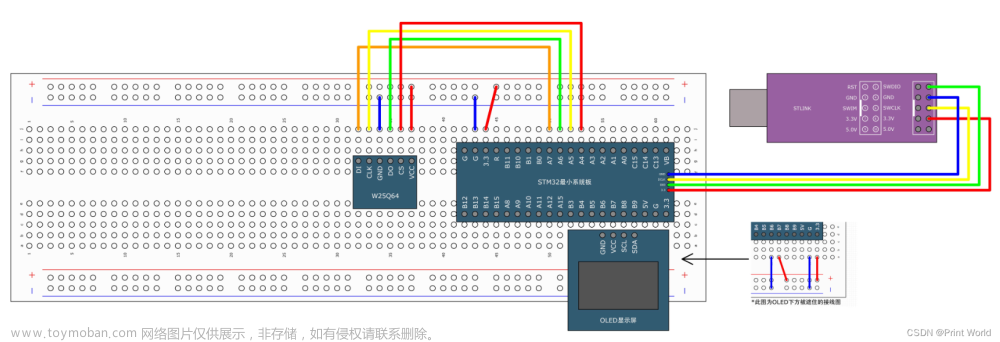
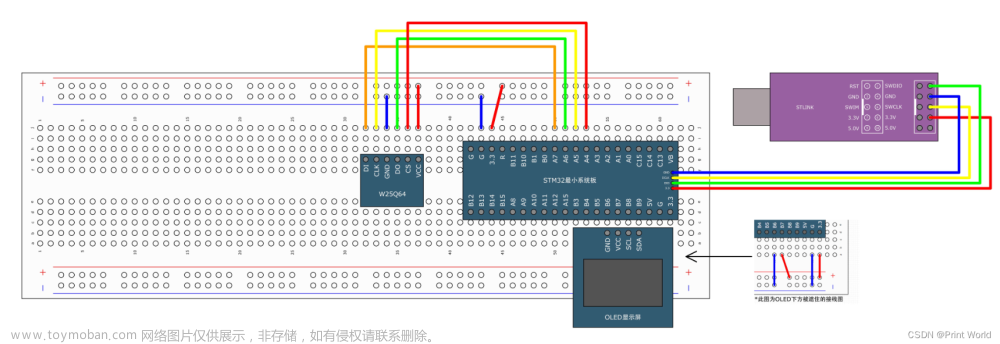
在原理图中我们可以看到板子上直接是使用了PB3、4、5、14引脚,接下来我们进行初始化。
void w25qxx_init(void)
{
//PB硬件时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);
//配置PB3 PB5 PB14为输出模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_5|GPIO_Pin_14; //第3 4 5根引脚
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_OUT; //输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出,增加输出电流能力。
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//高速响应
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //没有使能上下拉电阻
GPIO_Init(GPIOB,&GPIO_InitStructure);
//看时序图,工作在模式3,时钟线引脚PB3,初始电平为高电平
PBout(3)=1;
//看时序图,片选引脚PB14,初始电平为高电平
PBout(14)=1;
//PB4配置输入模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; //第4根引脚
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_IN; //输入模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出,增加输出电流能力。
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//高速响应
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //没有使能上下拉电阻
GPIO_Init(GPIOB,&GPIO_InitStructure);
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //主机模式
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //8位数据位
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //SPI FLASH可以设置为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //MISO在第二边沿采样数据
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //片选引脚由代码控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_8; //clk=84MHZ/8=10.5MHz
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //以最高有效位发送
SPI_Init(SPI1, &SPI_InitStructure);
SPI_Cmd(SPI1, ENABLE);
}
2.读取厂商ID
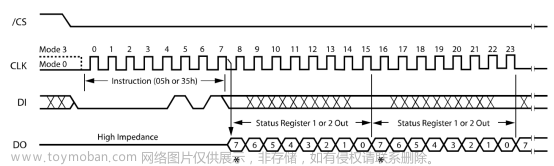
我们需要根据产品手册来进行这以操作,我们可以看到这样一张图(如下图),这可能看起来有点复杂,不知道从哪里下手,我们需要一点一点慢慢来。
我们将上下两张图拼接起来,其实是一张图,如下图:

这里可以把它分为7各部分。
2.1.读写字节

这里我们使用的是模式3,从图中可以看出需要从高位先写入,每次8位,读取也是一样的。
uint8_t spi1_send_byte(uint8_t byte)
{
int32_t i=0;
uint8_t d=0;
for(i=7; i>=0; i--)
{
//对byte每个bit进行判断
if(byte & (1<<i))
{
//MOSI引脚输出高电平
PBout(5)=1;
}
else
{
//MOSI引脚输出低电平
PBout(5)=0;
}
//时钟线输出低电平
PBout(3)=0;
//延时一会,MOSI引脚已经发送到对方
delay_us(1);
//时钟线输出高电平
PBout(3)=1;
//延时一会
delay_us(1);
//读取MISO引脚电平
if(PBin(4))
d|=1<<i;
}
return d;
}
2.2.读取ID
按照时序图的说明我们编写出一下代码
void w25qxx_read_id(uint8_t *m_id,uint8_t *d_id)
{
//片选引脚输出低电平
PBout(14)=0;
//发送90h命令
spi1_send_byte(0x90);
//发送24bit地址,该数值全为0
spi1_send_byte(0x00);
spi1_send_byte(0x00);
spi1_send_byte(0x00);
//传递任意参数,读取厂商id
*m_id=spi1_send_byte(0xFF);
//传递任意参数,读取设备id
*d_id=spi1_send_byte(0xFF);
//片选引脚输出高电平
PBout(14)=1;
}
3.其他的一些操作

在产品手册里有很多不同指令操作,这里不一一介绍,但是都和上面读取ID的操做差不多,如果有兴趣可以根据产品手册编写代码,下面会给出完整的代码,包括一些常见的操作。文章来源:https://www.toymoban.com/news/detail-803607.html
4.完整代码
#include "stm32f4xx.h"
#include "sys.h"
#include <stdio.h>
static GPIO_InitTypeDef GPIO_InitStructure;
static NVIC_InitTypeDef NVIC_InitStructure;
static USART_InitTypeDef USART_InitStructure;
static SPI_InitTypeDef SPI_InitStructure;
#pragma import(__use_no_semihosting_swi)
struct __FILE { int handle; /* Add whatever you need here */ };
FILE __stdout;
FILE __stdin;
int fputc(int ch, FILE *f) {
USART_SendData(USART1,ch);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
USART_ClearFlag(USART1,USART_FLAG_TXE);
return ch;
}
void _sys_exit(int return_code) {
}
void delay_us(uint32_t n)
{
SysTick->CTRL = 0; // Disable SysTick,关闭系统定时器
SysTick->LOAD = (168*n)-1; // 配置计数值(168*n)-1 ~ 0
SysTick->VAL = 0; // Clear current value as well as count flag
SysTick->CTRL = 5; // Enable SysTick timer with processor clock
while ((SysTick->CTRL & 0x10000)==0);// Wait until count flag is set
SysTick->CTRL = 0; // Disable SysTick
}
void delay_ms(uint32_t n)
{
while(n--)
{
SysTick->CTRL = 0; // Disable SysTick,关闭系统定时器
SysTick->LOAD = (168000)-1; // 配置计数值(168000)-1 ~ 0
SysTick->VAL = 0; // Clear current value as well as count flag
SysTick->CTRL = 5; // Enable SysTick timer with processor clock
while ((SysTick->CTRL & 0x10000)==0);// Wait until count flag is set
}
SysTick->CTRL = 0; // Disable SysTick
}
void usart1_init(uint32_t baud)
{
//打开PA硬件时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
//打开串口1硬件时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
//配置PA9和PA10为复用功能模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_10; //第9 10根引脚
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_AF; //多功能模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出,增加输出电流能力。
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//高速响应
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //没有使能上下拉电阻
GPIO_Init(GPIOA,&GPIO_InitStructure);
//将PA9和PA10引脚连接到串口1的硬件
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1);
//配置串口1相关参数:波特率、无校验位、8位数据位、1个停止位......
USART_InitStructure.USART_BaudRate = baud; //波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //8位数据位
USART_InitStructure.USART_StopBits = USART_StopBits_1; //1个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //允许收发数据
USART_Init(USART1, &USART_InitStructure);
//配置串口1的中断触发方法:接收一个字节触发中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
//配置串口1的中断优先级
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
//使能串口1工作
USART_Cmd(USART1, ENABLE);
}
void w25qxx_init(void)
{
//PB硬件时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);
//配置PB3 PB5 PB14为输出模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_5|GPIO_Pin_14; //第3 4 5根引脚
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_OUT; //输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出,增加输出电流能力。
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//高速响应
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //没有使能上下拉电阻
GPIO_Init(GPIOB,&GPIO_InitStructure);
//看时序图,工作在模式3,时钟线引脚PB3,初始电平为高电平
PBout(3)=1;
//看时序图,片选引脚PB14,初始电平为高电平
PBout(14)=1;
//PB4配置输入模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; //第4根引脚
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_IN; //输入模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出,增加输出电流能力。
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//高速响应
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //没有使能上下拉电阻
GPIO_Init(GPIOB,&GPIO_InitStructure);
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //主机模式
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //8位数据位
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //SPI FLASH可以设置为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //MISO在第二边沿采样数据
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //片选引脚由代码控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_8; //clk=84MHZ/8=10.5MHz
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //以最高有效位发送
SPI_Init(SPI1, &SPI_InitStructure);
SPI_Cmd(SPI1, ENABLE);
}
uint8_t spi1_send_byte(uint8_t byte)
{
int32_t i=0;
uint8_t d=0;
for(i=7; i>=0; i--)
{
//对byte每个bit进行判断
if(byte & (1<<i))
{
//MOSI引脚输出高电平
PBout(5)=1;
}
else
{
//MOSI引脚输出低电平
PBout(5)=0;
}
//时钟线输出低电平
PBout(3)=0;
//延时一会,MOSI引脚已经发送到对方
delay_us(1);
//时钟线输出高电平
PBout(3)=1;
//延时一会
delay_us(1);
//读取MISO引脚电平
if(PBin(4))
d|=1<<i;
}
return d;
}
//读取w25qxxState Regist(状态寄存器)值
uint8_t w25qxx_read_SR()
{
uint8_t RS1 = 0;
//片选引脚输出低电平
PBout(14)=0;
//发送90h命令
spi1_send_byte(0x05);
//接收指定字节数据
RS1=spi1_send_byte(0xFF);
//片选引脚输出高电平
PBout(14)=1;
return RS1;
}
//w25qxx读取数据
void w25qxx_read_data(uint8_t *data,uint32_t dataaddr,uint32_t size)
{
int8_t i=0;
//片选引脚输出低电平
PBout(14)=0;
//发送90h命令
spi1_send_byte(0x03);
//发送24bit地址,该数值全为0
//例如发送地址:0x123456
spi1_send_byte((uint8_t)(dataaddr>>16));
spi1_send_byte((uint8_t)(dataaddr>>8));
spi1_send_byte((uint8_t)dataaddr);
//接收指定字节数据
for(i=0;i<size;i++)
//传递任意参数,读取数据
data[i]=spi1_send_byte(0xFF);
//片选引脚输出高电平
PBout(14)=1;
}
//w25qxx写使能
void w25qxx_write_enable()
{
//片选引脚输出低电平
PBout(14)=0;
//发送90h命令
spi1_send_byte(0x06);
//片选引脚输出高电平
PBout(14)=1;
}
//w25qxx写使不能
void w25qxx_write_disable()
{
//片选引脚输出低电平
PBout(14)=0;
//发送90h命令
spi1_send_byte(0x04);
//片选引脚输出高电平
PBout(14)=1;
}
//扇区擦除
void w25qxx_erase_sector(uint32_t sectoraddr)
{
w25qxx_write_enable();
PBout(14) = 0;
//等待BUSY位清空
//while(w25qxx_read_SR()&0x01 == 0x01);
//发送扇区擦除命令
spi1_send_byte(0x20);
//发送24bit地址,该数值全为0
spi1_send_byte((uint8_t)(sectoraddr>>16));
spi1_send_byte((uint8_t)(sectoraddr>>8));
spi1_send_byte((uint8_t)sectoraddr);
PBout(14) = 1;
//等待BUSY位清空
while(w25qxx_read_SR()&0x01 == 0x01);
}
void w25qxx_page_write(uint8_t *data,uint32_t dataaddr,uint16_t size)
{
uint16_t i=0;
//写使能
w25qxx_write_enable();
PBout(14) = 0;
//发送页存储指令
spi1_send_byte(0x02);
//发送存储地址
spi1_send_byte((uint8_t)(dataaddr>>16));
spi1_send_byte((uint8_t)(dataaddr>>8));
spi1_send_byte(dataaddr);
//循环发送数据
for(i=0;i<size;i++)
spi1_send_byte(data[i]);
PBout(14) = 1;
//等待BUSY位清空
while(w25qxx_read_SR()&0x01 == 0x01);
//添加写保护
w25qxx_write_disable();
}
void w25qxx_read_id(uint8_t *m_id,uint8_t *d_id)
{
//片选引脚输出低电平
PBout(14)=0;
//发送90h命令
spi1_send_byte(0x90);
//发送24bit地址,该数值全为0
spi1_send_byte(0x00);
spi1_send_byte(0x00);
spi1_send_byte(0x00);
//传递任意参数,读取厂商id
*m_id=spi1_send_byte(0xFF);
//传递任意参数,读取设备id
*d_id=spi1_send_byte(0xFF);
//片选引脚输出高电平
PBout(14)=1;
}
int main(void)
{
int32_t i=0;
uint8_t m_id,d_id;
uint8_t data[256] = {0};
//使能(打开)端口F的硬件时钟,就是对端口F供电
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);
//串口1波特率:115200bps
usart1_init(115200);
//初始化GPIO引脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //第9根引脚
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_OUT; //输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出,增加输出电流能力。
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//高速响应
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //没有使能上下拉电阻
GPIO_Init(GPIOF,&GPIO_InitStructure);
PFout(9)=1;
//初始化SPI1连接的w25qxx
w25qxx_init();
w25qxx_read_id(&m_id,&d_id);
printf("m_id=%x,d_id=%x\r\n",m_id,d_id);
printf("read data at addr 0:\r\n");
w25qxx_read_data(data,0,64);
for(i=0;i<64;i++)
printf("%02X ",data[i]);
//扇区擦除
printf("\r\nerase sector 0:\r\n");
w25qxx_erase_sector(0);
printf("read data at addr 0:\r\n");
w25qxx_read_data(data,0,64);
for(i=0;i<64;i++)
printf("%02X ",data[i]);
//页写入
printf("write data at addr 0:\r\n");
for(i=0;i<256;i++)
data[i]=0x88;
w25qxx_page_write(data,0,256);
printf("read data at addr 0:\r\n");
w25qxx_read_data(data,0,256);
for(i=0;i<256;i++)
printf("%02X ",data[i]);
printf("\r\n");
while(1)
{
}
}
void USART1_IRQHandler(void)
{
uint8_t d;
//检测标志位
if(USART_GetITStatus(USART1,USART_IT_RXNE) == SET)
{
//接收数据
d=USART_ReceiveData(USART1);
//清空标志位
USART_ClearITPendingBit(USART1,USART_IT_RXNE);
}
}
三、效果演示
这里还是使用串口来调试看我们做出来的效果,如下图所示: 文章来源地址https://www.toymoban.com/news/detail-803607.html
文章来源地址https://www.toymoban.com/news/detail-803607.html
到了这里,关于基于STM32实现W25Q16读写操作(spi)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!