GD32F30x系列CAN通信配置:
先找到CAN模块时钟时挂载在APB1总线上的,如下图所示:
APB1总线的最大频率为60MHz,如下图所示:
根据总线频率可以计算出对应波特率的配置BS1,BS2等;
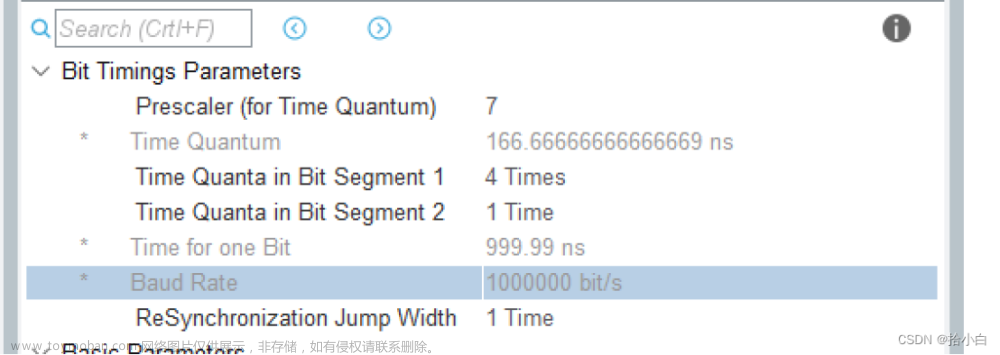
如果不会计算的话也可以直接使用工具,如下图所示:
这里工具会直接帮你你计算好BS1、BS2、PRE等参数,并且在改参数的配置下其出错的概率和采样准确率等,可以提高其开发效率。
另外需要注意的是,GD32F30x系列的CAN通信出错率会进行计数,当出错计数值达到255时CAN会进入离线状态,并且CAN发送和接收都会失效,所以当总线不稳定的情况下需要注意CAN是否进入离线状态以及需要恢复CAN功能。
1、创建can.c 和can.h文件并放到对应的文件夹中,如下图所示:
2、将创建好的can.c文件以及gd32f30x_can.c 和gd32f30x_dbg.c文件添加到项目中,如下图所示:
添加这个文件gd32f30x_dbg.c是由于gd32f30x_can.c文件中调用了调试相关函数,为了不修改库函数相关文件,所以可以将两个文件都添加进项目中。
3、完成CAN模块的初始化以及发送函数,中断接收等。文章来源:https://www.toymoban.com/news/detail-803675.html
//can.c文件
#include "can.h"
/*
CAN 通信初始化
*/
void gd32_can_init(void)
{
can_parameter_struct can_parameter;
can_filter_parameter_struct can_filter;
/* initialize CAN register */
can_deinit(CAN0);
/* enable CAN clock */
rcu_periph_clock_enable(RCU_CAN0);
rcu_periph_clock_enable(RCU_GPIOA);//使能时钟
gpio_init(GPIOA, GPIO_MODE_IPU, GPIO_OSPEED_50MHZ,GPIO_PIN_11);
gpio_init(GPIOA, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ,GPIO_PIN_12);//IO复用为CAN功能
/* configure CAN0 NVIC */
nvic_irq_enable(CAN0_RX1_IRQn,3,0); //中断配置
can_struct_para_init(CAN_INIT_STRUCT, &can_parameter);
can_struct_para_init(CAN_FILTER_STRUCT, &can_filter);//初始化参数
/* baudrate 250Kbps */
can_parameter.time_segment_1 = CAN_BT_BS1_14TQ;
can_parameter.time_segment_2 = CAN_BT_BS2_1TQ;
can_parameter.prescaler = 15;
/* initialize CAN */
can_init(CAN0, &can_parameter);
can_filter.filter_fifo_number = CAN_FIFO1;
can_filter.filter_enable = ENABLE;
can_filter_init(&can_filter);
/* enable can receive FIFO0 not empty interrupt */
can_interrupt_enable(CAN0, CAN_INT_RFNE1|CAN_INT_TME);
}
/*
CAN通信数据发送
can_frame---要发送的数据
发送成功返回0,失败返回1
*/
uint8_t gd32_can_send(can_trasnmit_message_struct can_frame)
{
uint8_t ret=0;
ret = can_message_transmit(CAN0,&can_frame);
if(ret == CAN_NOMAILBOX)
{
return 1;
}
return 0;
}
/*
CAN出错--重启CAN
*/
void gd32_can_error(void)
{
if( can_flag_get(CAN0, CAN_FLAG_MTE2) != RESET ||
can_flag_get(CAN0, CAN_FLAG_MTE0) != RESET ||
can_flag_get(CAN0, CAN_FLAG_MTE1) != RESET ||
can_flag_get(CAN0, CAN_FLAG_PERR) != RESET ||
can_flag_get(CAN0, CAN_FLAG_WERR) != RESET)
{
can_flag_clear(CAN0, CAN_FLAG_MTE0);
can_flag_clear(CAN0, CAN_FLAG_MTE1);
can_flag_clear(CAN0, CAN_FLAG_MTE2);
can_flag_clear(CAN0, CAN_FLAG_PERR);
can_flag_clear(CAN0, CAN_FLAG_WERR);
can_wakeup(CAN0);
gd32_can_init();
}
}
/*
CAN接收中断函数
*/
void CAN0_RX1_IRQHandler(void)
{
can_receive_message_struct can_mes;
memset(&can_mes,0,sizeof(can_mes));
can_message_receive(CAN0, CAN_FIFO1, &can_mes);
}
//can.h文件
#ifndef __CAN_H__
#define __CAN_H__
#include "gd32f30x.h"
#include "string.h"
void gd32_can_init(void);
uint8_t gd32_can_send(can_trasnmit_message_struct can_frame);
void gd32_can_error(void);
#endif
4、在main.c文件main函数中调用CAN的初始化,并循环往外发送CAN数据,编译下载程序到硬件板,如下图所示:
下载后运行程序,连接好CAN工具和CAN收发助手可以看到CAN助手中每隔1S接收到一条CAN报文,接收的数据与程序发送的数据一致,如下图所示:
使用CAN助手工具向硬件板中发送1条CAN报文,在CAN接收中断中设置断点,并获取CAN接收到的数据与发送的数据对比,如下图所示:
GD32F30x系列CAN通信接收与发送数据都正常,说明CAN通信配置成功。文章来源地址https://www.toymoban.com/news/detail-803675.html
到了这里,关于GD32F30x系列---CAN通信收发配置的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!



![[GD32F4]基于GD32固件库移植cherryusb[STM32F4]](https://imgs.yssmx.com/Uploads/2024/02/736610-1.png)



