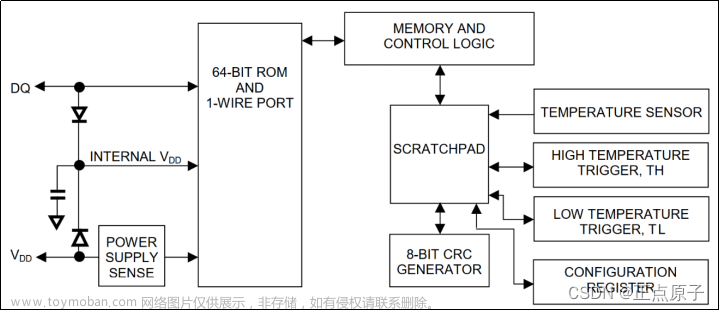
一、DS18B20介绍
(一)DS18B20技术性能特征
1、独特的单总线接口方式,DS18B20在与微处理器连接时仅需要一条口线即可实现微处理器与DS18B20的双向通讯,大大提高了系统的抗干扰性。
2、测温范围 -55°C~+125°C
3、支持多点组网功能,多个DS18B20可以并联在唯一的三线上,最多只能并联8个,实现多点测温,如果数量过多会使供电电压过低,从而造成信号传输的不稳定。
4、工作电源:3.0~5.5V/DC(可以数据线寄生电源)
5、在使用中不需要任何外围元件。
6、测量结果以9~12位数字量方式传送。
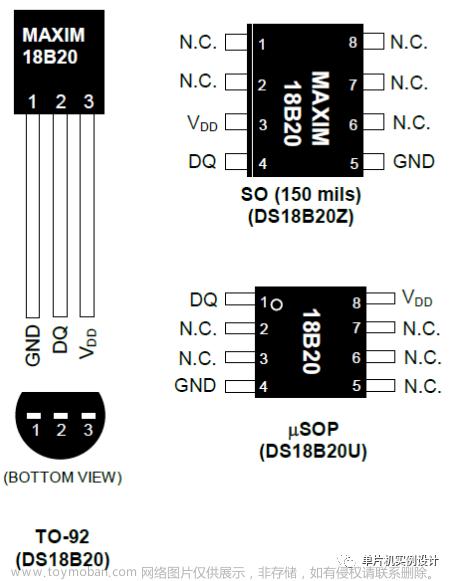
(二)DS18B20封装:
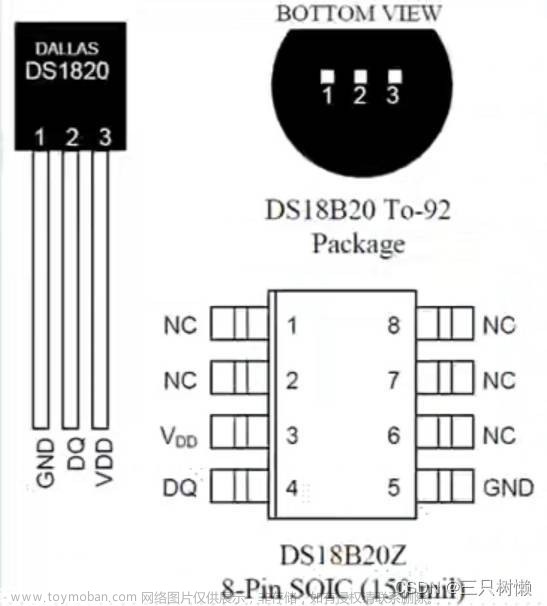
连接方式

硬件连接

(三)单总线是一种半双工通信方式。DS18B20共有6种信号:复位脉冲、应答脉冲、写0、写1、读0、读1。这些信号中除了应答脉冲以外,都由主机发出同步信号,并且发送所有的命令和数据都是字节的低位在前。
底层操作
//信号线:PG9
//IO方向设置
#define DS18B20_IO_IN() {GPIOG->MODER&=~(3<<(9*2)); GPIOG->MODER|=0<<9*2;}//PG9输入模
#define DS18B20_IO_OUT() {GPIOG->MODER&=~(3<<(9*2)); GPIOG->MODER|=1<<9*2;}//PG9输出模
//IO操作
#define DS18B20_DQ_OUT PGout(9) //数据端口PG9
#define DS18B20_DQ_IN PGin(9) //数据端口PG9上面提到,单片机中有五种信号类型是发送给DS18B20,只有一种应答信号是需要DS18B20返回信号的,因此需要设置某个时刻IO口的输入与输出,STM32F4中通过操作MODER寄存器来实现该方式。
二、信号类型详情
1、复位脉冲
单总线上的所有通信都是以初始化序列开始。主机输出低电平,保持低电平时间至少480us,以产生复位脉冲。接着主机释放总线,4.7K的上拉电阻将单总线拉高,延时15~69us,并进入接收模式(Rx),接着DS18B20拉低总线60~240us,以产生低电平应答脉冲。
//复位DS18B20
void DS18B20_Rst(void)
{
DS18B20_IO_OUT();//设置为输出模式
DS18B20_DQ_OUT=0;//拉低DQ
delay_us(750);//拉低750us(至少480us)
DS18B20_DQ_OUT=1;//DQ=1拉高释放总线
delay_us(15);//15US
//进入接收模式,等待应答信号
}2、应答信号
//等待DS18B20的回应
//返回1;未检测到DS18B20的存在 返回0:存在
u8 DS18B20_Check(void)
{
u8 retry=0;
DS18B20_IO_IN();//SET PA0 INPUT
while(DS18B20_DQ_IN&&retry<200)
{
retry++;
delay_us(1);
}
if(retry>=200) return 1;
else retry=0;
while(!DS18B20_DQ_IN&&retry<240)
{
retry++;
delay_us(1);
}
if(retry>=240) return 1;
return 0;
}3、写时序
写时序包括写0时序和写1时序,所有写时序至少需要60us,且在2次独立的写时序之间至少需要1us的恢复时间,两种写时序均起始于主机拉低总线。
写1时序:主机输出低电平,延时2us,然后释放总线,延时60us
写0时序:主机输出低电平,延时60us,然后释放总线,延时2us
//写一个字节到DS18B20
//dat:要写入的字节
void DS18B20_Write_Byte(u8 dat)
{
u8 j;
u8 testb;
DS18B20_IO_OUT();//设置PA0为输出
for(j=1;j<=8;j++)
{
testb=dat&0x01;
dat=dat>>1;
if(testb)//输出高
{
DS18B20_DQ_OUT=0;//主机输出低电平
delay_us(2);//延时2us
DS18B20_DQ_OUT=1;//释放总线
delay_us(60);//延时60us
}
else//输出低
{
DS18B20_DQ_OUT=0;//主机输出高电平
delay_us(60);//延时60us
DS18B20_DQ_OUT=1;//释放总线
delay_us(2);//延时20us
}
}
}4、读时序
单总线器件仅在主机发出读时序使,才向主机传输数据,所以在主机发出读数据命令之后,必须马上产生读时序,以便从机能够传输数据。
所有读时序至少需要60us,且在2次独立的读时序之间至少需要1us的恢复时间。每个读时序都由主机发起,至少拉低总线1us。主机在读时序期间必须释放总线,并且在时序起始后的15us内采样总线状态。
典型的读时序过程为:主机输出低电平延时2us,然后主机转入输入模式延时12us,然后读取单总线当前的电平,然后延时50us。
//从DS18B20读取一个位
//返回值:1/0
u8 DS18B20_Read_Bit(void)
{
u8 data;
DS18B20_IO_OUT();//设置为输出
DS18B20_DQ_OUT=0;//输出低电平2us
delay_us(2);
DS18B20_DQ_OUT=1;//拉高释放总线
DS18B20_IO_IN();//设置为输入
delay_us(12);//延时12us
if(DS18B20_DQ_IN) data=1;//读取总线数据
else data=0;
delay-us(50);//延时50us
return data;
}读取一个字节数据
//从DS18B20读取一个字节
//返回值:读到的数据
u8 DS18B20_Read_Byte(void)//读取一个字节
{
u8 i,j,dat;
dat=0;
for(i=0;i<=8;i++)
{
j=DS18B20_Read_Bit();
dat=(j<<7)|(dat>>1);
}
return dat;
}三、DS18B20典型温度读取过程
复位-->发SKIP ROM命令(0XCC)-->发开始转换命令(0X44)-->延时-->复位-->发送SKIP ROM命令(0XCC)-->发读存储命令(0XBE)-->连续读出两个字节数据(即温度)-->结束
//从DS18B20得到温度值
//精度:0.1°C
//返回值:温度值(-550~1250)
short DS18B20_Get_Temp(void)
{
u8 temp;
u8 TL,TH;
short tem;
DS18B20_Start();//开始温度转换(调用另一个函数)
DS18B20_Rst();//复位
DS18B20_Check();
DS18B20_Write_Byte(0xcc);
Ds18B20_Write_Byte(0xbe);
TL=DS18B20_Read-Byte();
TH=DS18B20_Read_Byte();
if(TH>7)
{
TH=~TH;
TL=~TL;
temp=0;//温度为负
}
else temp=1;//温度为正
tem=TH;//获得高八位
tem<<=8;
tem+=TL;//获得低八位
tem=(float)tem*0.625//转换
if(temp) return term;//返回温度值
else retrn -term;
}
//开始温度转换函数
void DS18B20_Start(void)
{
DS18B20_Rst();
DS18B20_Check;
DS18B20_Write_Byte(0xcc);
DS18B20_Write_Byte(0x44);
}关于温度转换:

代码中TL对应LS Byte TH对应MS Byte文章来源:https://www.toymoban.com/news/detail-804486.html
转化后得到的12位数据,存储在18B20的两个8比特的RAM中,二进制中的前面5位是符号位,如果测得得温度大于0,这五位为0,只要将测到得数值乘以0.0635即可得到实际温度;如果温度小于0,这五位为1,测到得数值需要取反加一再乘以0.0625即可得到实际温度。文章来源地址https://www.toymoban.com/news/detail-804486.html
到了这里,关于STM32——DS18B20温度传感器的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!