#生物背景
蜜蜂是一种群居生物,生物学家研究发现蜜蜂以跳舞的方式来交换蜜源信息。根据分工的不同,蜜蜂被分为三个工种:引领峰、跟随蜂、侦察蜂。
侦察蜂的职责是侦察蜜源(即蜜蜂的食物),一旦某一个侦察蜂找到蜜源后,实际上它的角色就切换为引领蜂了。
找到蜜源后的引领峰以跳舞的方式向同伴传递自己找到食物的信息,这时候一些饥饿的、没有找到食物的蜜蜂就会沿着引领峰指明的方向去寻找食物,这些相信引领峰传递的信息的蜜蜂实际上就是跟随蜂。这实际上属于招募蜜蜂的行为。
当引领峰寻找了多次蜜源后,发现再也找不到吃起来更香的蜜源后,引领峰说话的信服力会降低,于是跟随蜂也逐渐不相信引领峰传递的信息。
引领峰转变角色,做回侦察蜂。直到再次找到高质量的蜜源后,再做回引领峰,这实际上属于放弃蜜源的行为。
综上,蜂群实现群体智慧的最小搜索模型包括蜜源、引领蜂、跟随蜂和侦察蜂共4个组成要素,以及招募蜜蜂和放弃蜜源2种基本的行为。
#步骤
1)初始化各蜜源 ; 设定参数数量、侦察蜂搜索阈值以及最大迭代次数;
2)为蜜源分配一只引领蜂,在范围内进行随机搜索,产生新蜜源 ;
3)依据适应度评价函数,根据贪婪选择的方法确定保留的蜜源;
4) 轮盘赌计算引领蜂找到的蜜源被跟随的概率;
5)跟随峰采用与引领蜂相同的方式进行搜索,根据贪婪选择的方法确定保留的蜜源;
6)判断蜜源是否满足被放弃的条件。如满足,对应的引领蜂角色变为侦察蜂,否则直接转到8);
7)侦察蜂根据式(4)随机产生新蜜源;
8)判断算法是否满足终止条件,若满足则终止,输出最优解,否则转到2
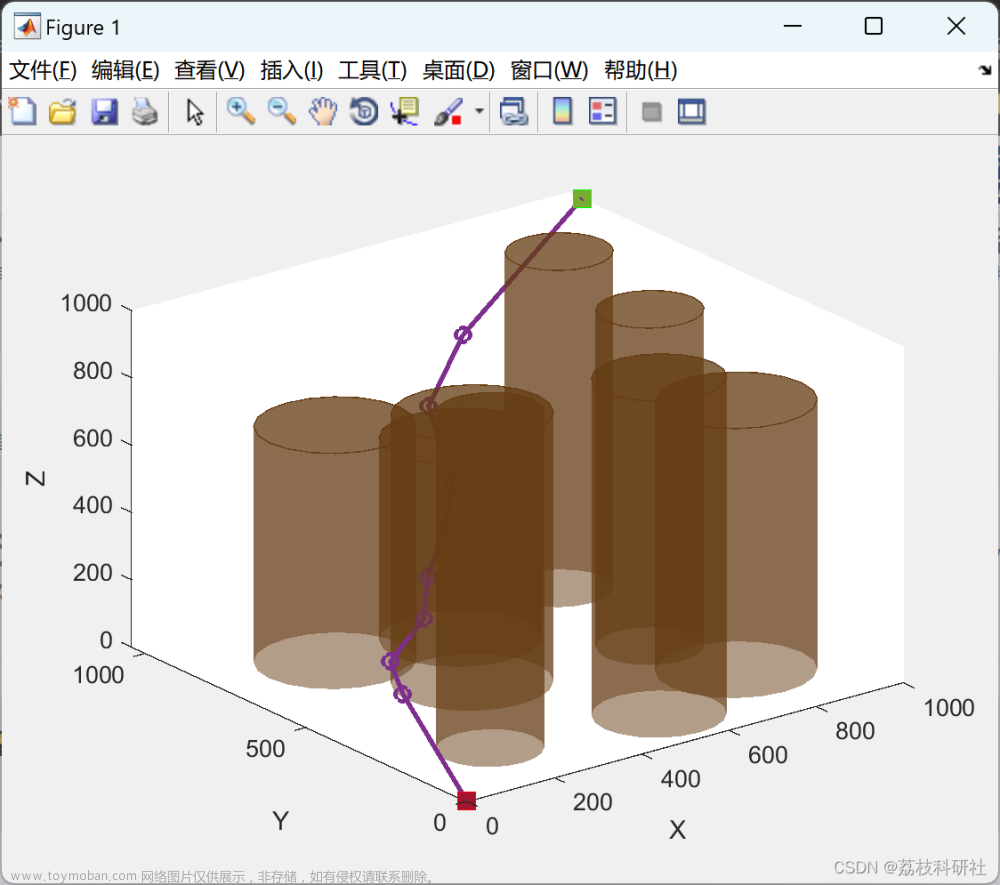
#多无人机轨迹规划约束

#算法步骤
| 蜂群采蜜行为 |
无人机代价函数优化问题 |
| 蜜源位置 |
可行路径节点的坐标值 |
| 蜜源的收益度大小 |
可行路径节点坐标的质量 |
| 寻找蜜源与采蜜的速度 |
无人机代价函数的求解速度 |
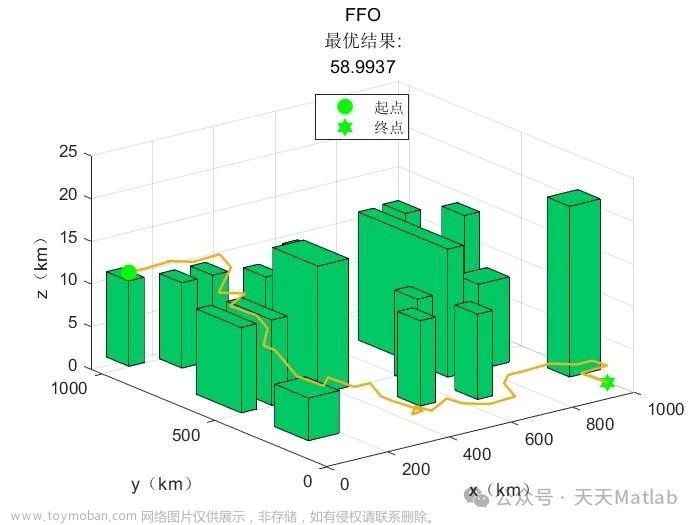
##仿真

代码结果:
distance_min =
264.8229
204.0834
318.8194
291.2678
routes_distance =
265.1149
211.3959
363.0191
309.3624
time_plan =
8.8372
26.8372
35.8372
17.8372
V_plan =
30.0000
7.8770
10.1297
17.3437
代码链接GitHub - promising76/abc-UAVplanning
部分代码如下:文章来源:https://www.toymoban.com/news/detail-805756.html
clc
close all
clear all
%================================��������=============================================%
global boundary setstart setfinal node delta_H danger_xi danger_yi danger_zi danger_ri weight;
%node=12;%���յ��������ʼ�㵽�յ�Ľڵ����(ż��)
L_FEN=26;%���ýڵ��ļ������
delta_H=[20 40];%���(���)�߶ȡ����й�����߶�
danger_xi=[207.1 393.9];%�������������
danger_yi=[333.3 414.1];
danger_zi=[389.9 349.2];
danger_ri=[0 0];%������в�뾶
weight=[1 0.01 0.3];%·�����ȡ������߶ȡ��н���ռȨ��
boundary=[500 0];%���û���������
setfinal=[291.8 219.8 492.4];%�����յ�
setstart_ALL=[176.8 237.4 254.5;%������㣬����Ϊ���˻�1��2��3...
161.6 363.6 429;
454.5 146.5 228.2;
393.9 308.1 234.3];
Vmin=3;%�������˻������ٶȷ�Χ��m/s��
Vmax=30;
Ways=2;%Ways=1ʱ��ʵ��ͬʱ��ɣ�ͬʱ����Ŀ�ꣻWays=2ʱ��ʵ��ָ��˳�����ε���Ŀ��
Order=[1 4 2 3];%���˻�����˳��
interval=9;%���˻�������ʱ�䣨s��
%====================================================================================%
lineX=size(setstart_ALL,1);文章来源地址https://www.toymoban.com/news/detail-805756.html
到了这里,关于基于人工蜂群算法多无人机轨迹规划的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!