最近使用sw4stm32调试串口时发现串口接收不定长数据很不方便,这里是帧头帧尾的接收方式,欢迎大佬指导。
这里要用串口中断接收的数据帧帧头为0xEB,帧尾为0XBE
这里是其中定义的变量
#define FRAME_HEADER 0xEB // 帧头
#define FRAME_TAIL 0xBE // 帧尾
uint8_t rxBuffer[256]; // 接收缓冲区
uint16_t rxIndex = 0; // 接收缓冲区索引
uint8_t frameStart = 0; // 帧起始标志
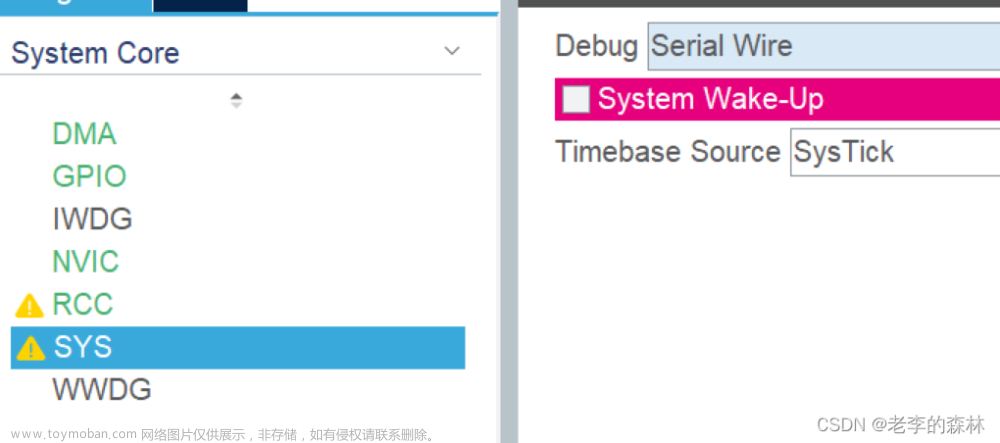
uint8_t frameEnd = 0; // 帧结束标志主函数里打开串口接收中断文章来源:https://www.toymoban.com/news/detail-805958.html
HAL_UART_Receive_IT(&huart1, &rxBuffer[rxIndex], 1);然后串口接收处理部分全都写在的回调函数中。文章来源地址https://www.toymoban.com/news/detail-805958.html
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART1)
{
if ((rxBuffer[rxIndex] == FRAME_HEADER) && (!frameStart))//检测帧头
{
frameStart = 1;
rxIndex =1;
}
else if (rxBuffer[rxIndex] == FRAME_TAIL && frameStart)//检测帧尾
{
frameEnd = 1;
}
else
{
rxIndex++;
}
if (frameStart && !frameEnd)//以一个字节为单位接收数据
{
HAL_UART_Receive_IT(&huart1, &rxBuffer[rxIndex], 1);
}
if (frameEnd)//接收完成
{
frameStart = 0;
frameEnd = 0;
}
}
}到了这里,关于STM32 串口接收不定长数据 HAL_UART_Receive_IT (帧头帧尾)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!