一、鱼鹰优化算法
鱼鹰优化算法(Osprey optimization algorithm,OOA)由Mohammad Dehghani 和 Pavel Trojovský于2023年提出,其模拟鱼鹰的捕食行为。具有寻优能力强、收敛速度快等特点。
鱼鹰优化算法的流程如下:
1. 初始化:设定算法参数,包括鱼鹰数量、迭代次数、搜索空间等。
2. 阶段一:定位和捕鱼(探索阶段)。
- 每只鱼鹰根据当前位置和速度进行位置更新。
- 计算每只鱼鹰的适应度值,即目标函数值。
- 根据适应度值对鱼鹰进行排序,选择适应度较好的鱼鹰作为水下鱼类。
- 每只鱼鹰根据水下鱼类的位置调整自己的速度和位置。
3. 阶段二:把鱼带到合适的位置(开发阶段)。
- 每只鱼鹰根据当前位置和速度进行位置更新。
- 计算每只鱼鹰的适应度值。
- 根据适应度值对鱼鹰进行排序,选择适应度较好的鱼鹰作为水下鱼类。
- 每只鱼鹰根据水下鱼类的位置调整自己的速度和位置。
4. 重复进行阶段一和阶段二,直到达到设定的迭代次数。
5. 输出最佳鱼鹰的位置作为优化结果。
Python:鱼鹰优化算法(Osprey optimization algorithm,OOA)求解23组基本测试函数-CSDN博客
二、基于非支配排序的鱼鹰优化算法
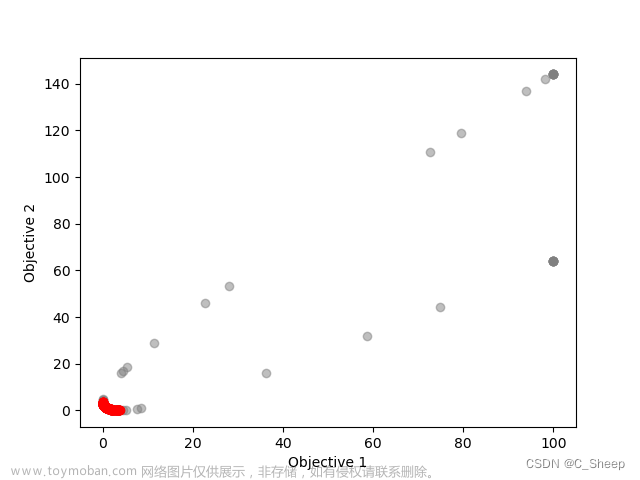
非支配排序的鱼鹰优化算法(Non-Dominated Sorting Osprey optimization algorithm,NSOOA)由OOA融合非支配排序策略而成,为了验证所提的NSOOA的有效性,将其在46个多目标测试函数(ZDT1、ZDT2、ZDT3、ZDT4、ZDT6、DTLZ1-DTLZ7、WFG1-WFG10、UF1-UF10、CF1-CF10、Kursawe、Poloni、Viennet2、Viennet3)以及1个工程应用(盘式制动器设计)上实验,并采IGD,GD,HV,SP四种评价指标进行评价。
(1)部分代码
close all;
clear ;
clc;
%%
% TestProblem测试问题说明:
%一共46个多目标测试函数,详情如下:
%1-5:ZDT1、ZDT2、ZDT3、ZDT4、ZDT6
%6-12:DZDT1-DZDT7
%13-22:wfg1-wfg10
%23-32:uf1-uf10
%33-42:cf1-cf10
%43-46:Kursawe、Poloni、Viennet2、Viennet3
%47 盘式制动器设计 温泽宇,谢珺,谢刚,续欣莹.基于新型拥挤度距离的多目标麻雀搜索算法[J].计算机工程与应用,2021,57(22):102-109.
%%
TestProblem=1;%1-47
MultiObj = GetFunInfo(TestProblem);
MultiObjFnc=MultiObj.name;%问题名
% Parameters
params.Np = 100; % Population size
params.Nr = 200; % Repository size
params.maxgen=200; % Maximum number of generations
numOfObj=MultiObj.numOfObj;%目标函数个数
D=MultiObj.nVar;%维度
f = NSOOA(params,MultiObj);
X=f(:,1:D);%PS
Obtained_Pareto=f(:,D+1:D+numOfObj);%PF
if(isfield(MultiObj,'truePF'))%判断是否有参考的PF
True_Pareto=MultiObj.truePF;
%% Metric Value
% ResultData的值分别是IGD、GD、HV、Spacing (HV越大越好,其他指标越小越好)
ResultData=[IGD(Obtained_Pareto,True_Pareto),GD(Obtained_Pareto,True_Pareto),HV(Obtained_Pareto,True_Pareto),Spacing(Obtained_Pareto)];
else
%计算每个算法的Spacing,Spacing越小说明解集分布越均匀
ResultData=Spacing(Obtained_Pareto);%计算的Spacing
end
%%
disp('Repository fitness values are stored in Obtained_Pareto');
disp('Repository particles positions are store in X');(2)部分结果
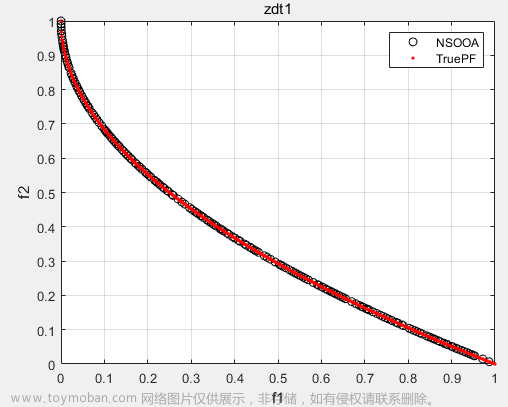







三、完整MATLAB代码
文件夹内包含NSOOA求解46个多目标测试函数(ZDT1、ZDT2、ZDT3、ZDT4、ZDT6、DTLZ1-DTLZ7、WFG1-WFG10、UF1-UF10、CF1-CF10、Kursawe、Poloni、Viennet2、Viennet3)以及1个工程应用(盘式制动器设计)的完整MATLAB,通过IGD,GD,HV,SP四种评价指标。文章来源:https://www.toymoban.com/news/detail-806081.html
 文章来源地址https://www.toymoban.com/news/detail-806081.html
文章来源地址https://www.toymoban.com/news/detail-806081.html
到了这里,关于多目标优化算法:基于非支配排序的鱼鹰优化算法(NSOOA)MATLAB的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!