小梅哥的这个ZYNQ开发板上的DDR3位于PS侧,PL侧想要使用DDR3作为缓存的话,得通过HP接口来与PS侧的DDR3控制进行通信。
本次实验在小梅哥OV5640工程的基础上,通过修改VDMA的S2MM端的模块而来的。
将VMDA的帧缓存区设为1,关闭帧同步的功能后,其实和DMA差不多。
一、需要自定义的ip核
这里列出的为自己写的IP核。小梅哥的工程里还用到了其它的自定义的IP核,这里就不列出了。
1、串口接收图像数据模块
该模块调用了之前写的串口8位接收模块,详情可点击查看。
此外,本模块还调用16位宽、深度为1024的带数据计数的普通FIFO核
该模块主要的思想就是将接收到的两个8位的数据拼接位1个16位的数据并存入FIFO中,
当存入的数据达到LINE_LENGTH(800)的时候,在收到从接口的准备信号时一次性写入VMDA中,再通过VMDA将数据写到DDR3中。
此外该模块在应用的时候要封装成带AXI4_Stream 接口的IP核,具体封装过程可网上找教程。
`timescale 1ns / 1ps
//////////////////////////////////////////////////////////////////////////////////
// Company: GDUT
// Engineer: Lclone
//
// Create Date: 2023/02/07 20:38:34
// Design Name:
// Module Name: Img_Rx
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//////////////////////////////////////////////////////////////////////////////////
module Img_Rx
# (parameter RX_BAUD = 115200,
parameter CLK_FQC = 50_000_000,
parameter LINE_LENGTH = 800)
(
input Uart_Rx,
//---------------------------
input m_clk,
input m_axis_aresetn,
output [15:0] m_axis_tdata,
output reg m_axis_tlast,
input m_axis_tready,
output reg m_axis_tvalid
);
wire [7:0] Uart_Data;
wire Rx_done;
reg Rx_done_r;
reg Rx_done_cnt;
reg [15:0] Uart_Data_16;
wire [9:0] fifo_data_count;
reg [9:0] out_data_count;
reg m_axis_tvalid_r;
always @(posedge m_clk) Rx_done_r <= Rx_done;
always @(posedge m_clk) m_axis_tvalid <= m_axis_tvalid_r;
always @(posedge m_clk or negedge m_axis_aresetn) begin
if(m_axis_aresetn == 0)
Uart_Data_16 <= 0;
else if(Rx_done == 1)
Uart_Data_16 <= {Uart_Data_16[7:0],Uart_Data};
end
always @(posedge m_clk or negedge m_axis_aresetn) begin
if(m_axis_aresetn == 0)
Rx_done_cnt <= 0;
else if(Rx_done == 1)
Rx_done_cnt <= Rx_done_cnt + 1'b1;
else
Rx_done_cnt <= Rx_done_cnt;
end
always @(posedge m_clk or negedge m_axis_aresetn) begin
if(m_axis_aresetn == 0)
m_axis_tvalid_r <= 0;
else if(m_axis_tready == 1 & fifo_data_count >= LINE_LENGTH)
m_axis_tvalid_r <= 1'b1;
else if(fifo_data_count <= 1)
m_axis_tvalid_r <= 0;
else
m_axis_tvalid_r <= m_axis_tvalid_r;
end
always @(posedge m_clk or negedge m_axis_aresetn) begin
if(m_axis_aresetn == 0)
out_data_count <= 0;
else if(out_data_count == LINE_LENGTH - 1)
out_data_count <= 0;
else if(m_axis_tvalid_r & m_axis_tready)
out_data_count <= out_data_count + 1'b1;
else
out_data_count <= out_data_count;
end
always @(posedge m_clk or negedge m_axis_aresetn) begin
if(m_axis_aresetn == 0)
m_axis_tlast <= 0;
else if(out_data_count == LINE_LENGTH - 1)
m_axis_tlast <= 1;
else
m_axis_tlast <= 0;
end
uart_byte_rx
# (
.RX_BAUD (RX_BAUD),
.CLK_FQC (CLK_FQC))
uart_byte_rx_inst
(
.Clk (m_clk),
.Rst_n (m_axis_aresetn),
.Uart_rx (Uart_Rx),
.Data (Uart_Data),
.Rx_done (Rx_done)
);
fifo_generator_0 fifo_generator_0_inst (
.clk(m_clk), // input wire clk
.srst(~m_axis_aresetn), // input wire srst
.din(Uart_Data_16), // input wire [15 : 0] din
.wr_en(~Rx_done_cnt & Rx_done_r), // input wire wr_en
.rd_en(m_axis_tvalid_r & m_axis_tready), // input wire rd_en
.dout(m_axis_tdata), // output wire [15 : 0] dout
.full(), // output wire full
.empty(), // output wire empty
.data_count(fifo_data_count) // output wire [9 : 0] data_count
);
endmodule
2、模块仿真
(1)仿真激励
`timescale 1ns / 1ps
module rx_img_test();
reg clk_50m;
initial clk_50m <= 1;
always #10 clk_50m <= ~clk_50m;
reg rst_n;
initial begin
rst_n <= 0;
#200
rst_n <= 1;
end
wire [15:0] m_axis_tdata;
wire m_axis_tlast;
wire m_axis_tready;
wire m_axis_tvalid;
wire [15:0] out_axis_tdata;
wire out_axis_tlast;
wire out_axis_tready;
wire out_axis_tvalid;
reg Uart_Rx;
reg [ 7:0] Uart_Data;
Img_Rx #(
.RX_BAUD(2_000_000),
.CLK_FQC(100_000_000),
.LINE_LENGTH(16)
)
Img_Rx_inst (
.Uart_Rx(Uart_Rx), // input wire Uart_Rx
.m_clk(clk_50m), // input wire m_clk
.m_axis_aresetn(rst_n), // input wire m_axis_aresetn
.m_axis_tdata(m_axis_tdata), // output wire [15 : 0] m_axis_tdata
.m_axis_tlast(m_axis_tlast), // output wire m_axis_tlast
.m_axis_tready(m_axis_tready), // input wire m_axis_tready
.m_axis_tvalid(m_axis_tvalid) // output wire m_axis_tvalid
);
axis_data_fifo_0 axis_data_fifo_0_inst (
.s_axis_aresetn(rst_n), // input wire s_axis_aresetn
.s_axis_aclk(clk_50m), // input wire s_axis_aclk
.s_axis_tvalid(m_axis_tvalid), // input wire s_axis_tvalid
.s_axis_tready(m_axis_tready), // output wire s_axis_tready
.s_axis_tdata(m_axis_tdata), // input wire [15 : 0] s_axis_tdata
.s_axis_tlast(m_axis_tlast), // input wire s_axis_tlast
.m_axis_tvalid(out_axis_tvalid), // output wire m_axis_tvalid
.m_axis_tready(out_axis_tready), // input wire m_axis_tready
.m_axis_tdata(out_axis_tdata), // output wire [15 : 0] m_axis_tdata
.m_axis_tlast(out_axis_tlast) // output wire m_axis_tlast
);
initial begin
Uart_Rx <= 1;
Uart_Data <= 0;
#200
repeat (256) begin
data_deliver(Uart_Data);
Uart_Data = Uart_Data + 1;
end
$stop;
end
task data_deliver;
input [7:0] test_data;
begin
Uart_Rx <= 1'b0;
#1000
Uart_Rx <= test_data[0];
#1000
Uart_Rx <= test_data[1];
#1000
Uart_Rx <= test_data[2];
#1000
Uart_Rx <= test_data[3];
#1000
Uart_Rx <= test_data[4];
#1000
Uart_Rx <= test_data[5];
#1000
Uart_Rx <= test_data[6];
#1000
Uart_Rx <= test_data[7];
#1000
Uart_Rx <= 1'b1;
#1000;
end
endtask
assign out_axis_tready = 1;
endmodule
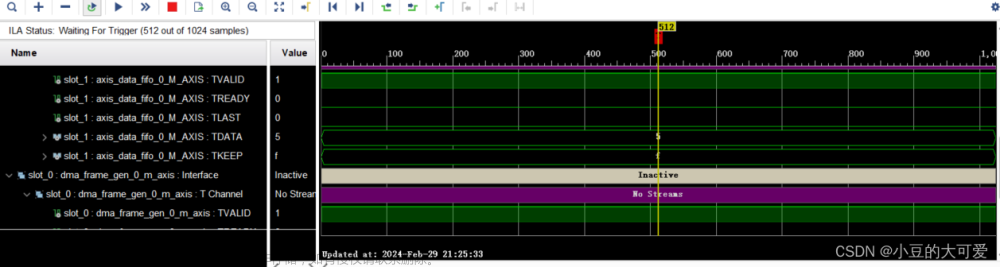
(2)仿真结果

可见该模块能够正确地将16个两字节的数据正确的输出,并在最后一个数据的位置基于一个tlast信号。
二、工程修改
打开小梅哥的ACZ7020的OV5640_LCD工程,然后将红框部分的模块删除,加入自定义的串口接收图像数据模块。

并修改下列IP核的参数
将频率修改为如下:
将帧缓存区设为1
Fsync Options选择None,关掉帧同步功能
在约束文件中,加入串口的管脚约束
在SDK中,将OV5640的初始化函数删除,将PS_IIC和OV5640库删除
同时也将PS_IIC和OV5640库的路径删除掉
然后就可以下载程序到开发板上了文章来源:https://www.toymoban.com/news/detail-807308.html
三、上板验证
将程序下载进开发板,然后打开img2lcd软件,读取一个800*480大小的BMP文件,并按如下设置:
然后在输出的文件中进行修改
删除首行
删除末尾符号
使用软件的查找替换功能,将所有的0X删掉,并将","换为空格符,然后使用行操作里面的行合并去除掉每一行末尾的回车符。最后就得到传输的图像数据:
打开友善串口调试助手,将图像数据复制进去,打开串口端口,设置好波特率,然后发送,确保TX发送了768000个字节,否则图像会错位;确保底下绿色的字显示的波特率为115200,否则数据无法正确传输。
传输数据后,发现图像能够正确显示在LCD上
实验成功。
本随笔还有许多小细节没有给出,如果遇到问题,可以评论询问。文章来源地址https://www.toymoban.com/news/detail-807308.html
到了这里,关于ZYNQ基于DMA的串口传图的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!