线性矩阵不等式(LMI)(一):简单介绍
主要从以下三个方面介绍:
- 什么是线性矩阵不等式(LMI)
- 为什么要用线性矩阵不等式(LMI)
- 线性矩阵不等式的发展(控制系统中)
1. 线性矩阵不等式
如名字所示线性矩阵不等式三要素为:
- 线性 - 注意双线性时,LMI不好求解(非凸问题);例:在不等式中出现 P A K PAK PAK形式,其中 P , K P,K P,K都为未知变量;可以利用消元法/换元法[1]转化为LMI形式;
- 矩阵变量 - 可以表示成一般形式/标准形式;
- 不等号 - 表示矩阵的正定/负定,而不是大小关系;
1.1 一般形式
-
LMI的一般形式可以表示为[2]:
L ( X ) = D T X + X T D + ∑ i = 1 l ( E i T X F i + F i T X T E i ) + Q < 0 L(X) = D^TX+X^TD+\sum_{i=1}^l(E_i^TXF_i+F_i^TX^TE_i)+Q < 0 L(X)=DTX+XTD+i=1∑l(EiTXFi+FiTXTEi)+Q<0
其中, X n × n ∈ R m × n X^{n×n}\in \mathbb{R}^{m×n} Xn×n∈Rm×n是矩阵变量, D , E i ∈ R m × n , F i ∈ R n × n , i = 1 , 2 , … , l . D,E_{i}\in\mathbb{R}^{m\times n},F_{i}\in\mathbb{R}^{n\times n},i=1,2,\ldots,l. D,Ei∈Rm×n,Fi∈Rn×n,i=1,2,…,l. 是任意矩阵, Q ∈ S n Q\in\mathbb{S}^{n} Q∈Sn是对称矩阵。式中, D T X + X T D , E i T X F i + F i T X T E i , Q D^TX+X^TD,E_i^TXF_i+F_i^TX^TE_i,Q DTX+XTD,EiTXFi+FiTXTEi,Q保证了 L ( X ) L(X) L(X)的线性和对称性;通过选择合适的矩阵 X X X使得 L ( X ) L(X) L(X)是负定的。
-
当 X = P = P T , D = A , F i = E i = 0 X=P=P^T,D=A,F_i=E_i=0 X=P=PT,D=A,Fi=Ei=0时,LMI一般形式可以转化为Lyapunov LMI:
L ( P ) = A T P + P T A + Q < 0 L(P) = A^TP+P^TA+Q < 0 L(P)=ATP+PTA+Q<0对于控制系统来说,当存在一个正定矩阵 P P P,使得上式成立时,则系统时稳定的。
Lyapunov LMI的最初解法为,通过选择调整正定矩阵 Q Q Q,求解Lyapunov方程 A T P + P A = − Q A^TP+PA=-Q ATP+PA=−Q来求解矩阵 P P P;
-
1.2 标准形式
-
LMI的标准形式为[2]:
A ( x ) = A 0 + x 1 A 1 + ⋅ ⋅ ⋅ + x n A n < 0 A(x) = A_0 + x_1A_1 + \cdot\cdot\cdot+x_nA_n < 0 A(x)=A0+x1A1+⋅⋅⋅+xnAn<0
其中, x i , i = 1 , 2 , … , n x_i,i=1,2,\ldots,n xi,i=1,2,…,n是未知标量,称为决策变量。 A i , i = 1 , 2 , … , n A_i,i=1,2,\ldots,n Ai,i=1,2,…,n是已知对称矩阵。选择标量 x i x_i xi使得上式成立;
-
例: 让 x 1 , x 2 ∈ R x_1,x_2\in\mathbb{R} x1,x2∈R,
A ( x ) = A 0 + A 1 x 1 + A 2 x 2 , A\left(x\right)=A_0+A_1x_1+A_2x_2, A(x)=A0+A1x1+A2x2,
其中, A 0 = [ 1 0 0 − 1 ] , A 1 = [ − 1 − 1 − 1 4 ] , A 2 = [ − 1 1 1 − 2 ] . A_0=\begin{bmatrix}1&&0\\0&&-1\end{bmatrix},\quad A_1=\begin{bmatrix}-1&&-1\\-1&&4\end{bmatrix},\quad A_2=\begin{bmatrix}-1&&1\\1&&-2\end{bmatrix}. A0=[100−1],A1=[−1−1−14],A2=[−111−2].带入可得
A ( x ) = [ 1 − x 1 − x 2 − x 1 + x 2 − x 1 + x 2 − 1 + 4 x 1 − 2 x 2 ] , A\left(x\right)=\begin{bmatrix}1-x_1-x_2&-x_1+x_2\\-x_1+x_2&-1+4x_1-2x_2\end{bmatrix}, A(x)=[1−x1−x2−x1+x2−x1+x2−1+4x1−2x2],
A ( x ) < 0 A(x)<0 A(x)<0等价于
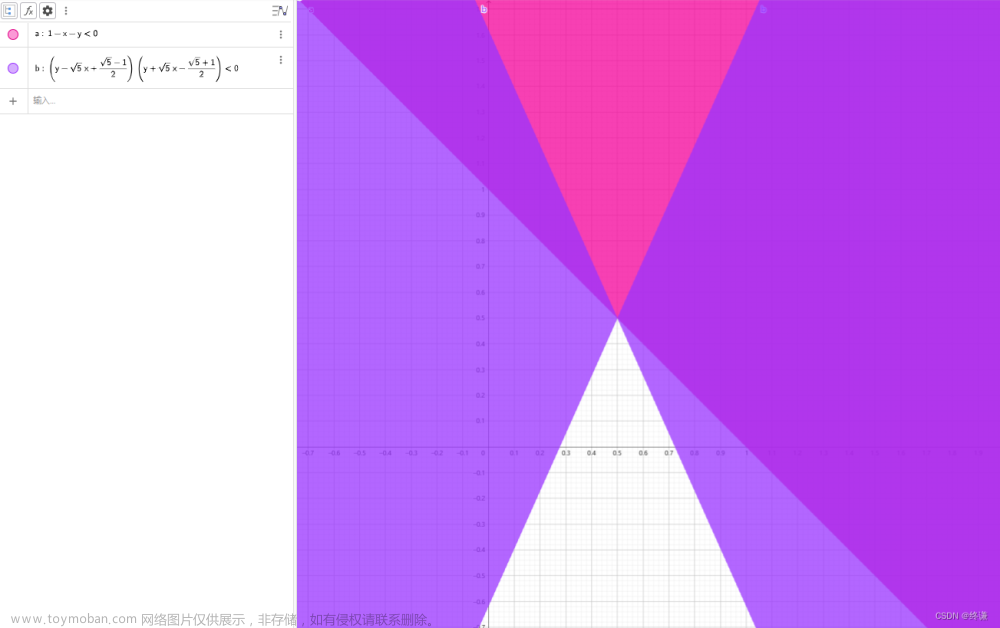
{ 1 − x 1 − x 2 < 0 , det [ 1 − x 1 − x 2 − x 1 + x 2 − x 1 + x 2 − 1 + 4 x 1 − 2 x 2 ] = − 5 x 1 2 + 5 x 1 + x 2 2 − x 2 − 1 > 0. \begin{cases} 1-x_1-x_2<0,\\ \det\begin{bmatrix}1-x_1-x_2&-x_1+x_2\\-x_1+x_2&-1+4x_1-2x_2\end{bmatrix}=-5x_1^2+5x_1+x_2^2-x_2-1>0. \end{cases} ⎩ ⎨ ⎧1−x1−x2<0,det[1−x1−x2−x1+x2−x1+x2−1+4x1−2x2]=−5x12+5x1+x22−x2−1>0.{ − 1 + x 1 + x 2 > 0 ( x 2 − 5 x 1 + 5 − 1 2 ) ( x 2 + 5 x 1 − 5 + 1 2 ) > 0. \begin{cases}-1+x_1+x_2>0\\\left(x_2-\sqrt5x_1+\frac{\sqrt5-1}{2}\right)\left(x_2+\sqrt5x_1-\frac{\sqrt5+1}{2}\right)>0.\end{cases} {−1+x1+x2>0(x2−5x1+25−1)(x2+5x1−25+1)>0.
根据上式可得 ( x 1 , x 2 ) (x_1,x_2) (x1,x2)取值范围为,下图所示公共部分。
-
1.3 二者关系
-
让标准形式中 A i , i = 1 , . . . , n A_i,i=1,...,n Ai,i=1,...,n 为一般形式中 P P P的基底,则 P P P可表示为 P = A 0 + x 1 A 1 + ⋅ ⋅ ⋅ + x n A n P = A_0 + x_1A_1 + \cdot\cdot\cdot+x_nA_n P=A0+x1A1+⋅⋅⋅+xnAn。定义 T i = A T A i + A i T A , T_i = A^TA_i+A_i^TA, Ti=ATAi+AiTA,带入到标准形式中,则可将一般形式转化为标准形式
L ( P ) = T 0 + ∑ i = 1 n x i T i L(P) = T_0+\sum_{i=1}^nx_iT_i L(P)=T0+i=1∑nxiTi- 例:根据Lyapunov稳定理论,二维线性系统
x ˙ ( t ) = A x ( t ) , x ( 0 ) ≠ 0 \dot x(t) = A x(t) , x(0)\neq 0 x˙(t)=Ax(t),x(0)=0
稳定的充要条件是,存在满足不等式
A T P + P A < 0 A^TP+PA<0 ATP+PA<0
的正定阵 P = P T ∈ R 2 × 2 P=P^{T}\in\mathbb{R}^{2\times2} P=PT∈R2×2。这里,2 × 2的对称阵 P P P有以下对称基底
P 1 = [ 1 0 0 0 ] , P 2 = [ 0 1 1 0 ] , P 3 = [ 0 0 0 1 ] \left.P_{1}=\left[\begin{array}{cc}1&0\\0&0\end{array}\right.\right],P_{2}=\left[\begin{array}{cc}0&1\\1&0\end{array}\right],P_{3}=\left[\begin{array}{cc}0&0\\0&1\end{array}\right] P1=[1000],P2=[0110],P3=[0001]
通过利用这些对称基底,* P P P*可写为
P = [ x 1 x 2 x 2 x 3 ] = x 1 P 1 + x 2 P 2 + x 3 P 3 \left.P=\left[\begin{array}{cc}x_1&x_2\\x_2&x_3\end{array}\right.\right]=x_1P_1+x_2P_2+x_3P_3 P=[x1x2x2x3]=x1P1+x2P2+x3P3
将其带入(6)可得
A P + P A T = x 1 ( A P 1 + P 1 A T ) + x 2 ( A P 2 + P 2 A T ) + x 3 ( A P 3 + P 3 A T ) < 0 AP+PA^T=x_1(AP_1+P_1A^T)+x_2(AP_2+P_2A^T)+x_3(AP_3+P_3A^T)<0 AP+PAT=x1(AP1+P1AT)+x2(AP2+P2AT)+x3(AP3+P3AT)<0
- 例:根据Lyapunov稳定理论,二维线性系统
2. 线性矩阵不等式的优点
在分析与设计控制系统中的优点[2]
全局优化解及数值可靠性
- LMIs 的形式是一种凸约束形式,因此有全局最优解
- 可以得到可靠和有效的数值解
- 规模很大也可以求解
能够进行系统的多目标设计
- 通过将系统不同性能要求,转化为LMI组形式,共同求解LMIs,实现系统多目标设计
成熟的工具包可以使用
- MATLAB LMI toolbox;(后面介绍这个)
- YALMIP;(可以参考文献[3])
- CVX;(没用过不太清楚)
数值可靠性重要性!
数值可靠性可分为
- good-conditioned problems (e.g. 奇异值分解),无论怎么分解都可以保证数值的精度。
- ill-conditioned problems (e.g. 矩阵求逆),矩阵求逆,如果条件数很大,求的矩阵的逆精度会受到损失。
例:给定以下单输入基准系统
x ˙ = A x + B u \dot x = Ax + Bu x˙=Ax+Bu
其中
A = [ 20 20 19 ⋱ ⋱ 20 1 ] , B = [ 1 0 ⋮ 0 ] \left.A=\left[\begin{array}{ccccc}20&&&&\\20&19&&&\\&\ddots&\ddots&&\\&&20&1&\end{array}\right.\right],B=\left[\begin{array}{c}1\\0\\\vdots\\0\end{array}\right] A= 202019⋱⋱201 ,B= 10⋮0
配置系统极点 p = [ − 1 ± i , − 2 ± i , − 3 ± i , − 4 ± i , − 5 ± i , − 6 ± i , − 7 ± i , − 8 ± i , − 9 ± i , − 10 ± i ] p = [-1\pm i,-2\pm i,-3\pm i,-4\pm i,-5\pm i, -6\pm i,-7\pm i,-8\pm i,-9\pm i ,-10\pm i] p=[−1±i,−2±i,−3±i,−4±i,−5±i,−6±i,−7±i,−8±i,−9±i,−10±i]使用matlab place 命令得到的结果为:
452.58+0i , -3.5361+48.266i , -3.536148.266i -7.8615+21.439i , -7.8615-21.439i , − 8.7621 + 11.15i − 8.7621 − 11.15i , -9.0799+4.9281i , -9.0799-4.9281i -9.1658+0i , 19+0i , 18+0i 17+0i , 16+0i , 15+0i 14+0i , 13+0i , 12+0i 11+0i \begin{aligned} &&\text{452.58+} \text{0i} ,~ &&\text{-3.5361+} \text{48.266i} ,~ &&\text{-3.5361} \text{48.266i} \\ &&\text{-7.8615+}\text{21.439i} ,~ &&\text{-7.8615-} \text{21.439i} ,~ &&-8.7621+ \text{11.15i} \\ &&-8.7621- \text{11.15i} ,~ &&\text{-9.0799+} \text{4.9281i} ,~ &&\text{-9.0799-} \text{4.9281i} \\ &&\text{-9.1658+} \text{0i} ,~ &&\text{19+} \text{0i} ,~ &&\text{18+} \text{0i} \\ &&\text{17+} \text{0i} ,~ &&\text{16+} \text{0i} ,~ &&\text{15+} \text{0i} \\ &&\text{14+} \text{0i} ,~ &&\text{13+} \text{0i} ,~ &&\text{12+} \text{0i} \\ &&\text{11+} \text{0i} \end{aligned} 452.58+0i, -7.8615+21.439i, −8.7621−11.15i, -9.1658+0i, 17+0i, 14+0i, 11+0i-3.5361+48.266i, -7.8615-21.439i, -9.0799+4.9281i, 19+0i, 16+0i, 13+0i, -3.536148.266i−8.7621+11.15i-9.0799-4.9281i18+0i15+0i12+0i
从上可以看出place算法在一些时候并不能保证数值稳定性
2.1 LMI 是一个凸集
-
凸优化问题 = 凸指标+凸约束
{ min f 0 ( x ) s.t. f i ( x ) ≤ 0 , i = 1 , 2 , . . . , m A x = b \begin{cases} \text{min} ~~ f_0(x)\\ \text{s.t.} ~~ f_i(x)\leq 0, i = 1,2,...,m\\ \qquad Ax = b \end{cases} ⎩ ⎨ ⎧min f0(x)s.t. fi(x)≤0,i=1,2,...,mAx=b
其中 f i , i = 0 , 1 , . . . , m f_i,i=0,1,...,m fi,i=0,1,...,m是一组凸函数,等式约束必须是仿射结构(线性的)。目标函数,是凸函数;不等式约束是凸集;等式约束时仿射的;则称此优化问题为凸优化问题。
-
凸函数
f ( θ x + ( 1 − θ ) y ) ≤ θ f ( x ) + ( 1 − θ ) f ( y ) f(\theta x+(1-\theta)y)\leq \theta f(x)+(1-\theta)f(y) f(θx+(1−θ)y)≤θf(x)+(1−θ)f(y)
其中, θ ∈ [ 0 , 1 ] , x , y ∈ Ω \theta\in[0,1],x,y\in \Omega θ∈[0,1],x,y∈Ω, Ω \Omega Ω是一个凸集。简单描述,函数图像上任取两点连线的中点,大于此函数任取两点对应的自变量的中点的函数值,则此函数为凸函数。
-
凸集
如果 x , y ∈ F , 0 ≤ θ ≤ 1 x,y\in \mathbb{F},0\leq \theta \leq1 x,y∈F,0≤θ≤1,且
θ x 1 + ( 1 − θ ) x 2 ∈ F \theta x_1+ (1-\theta)x_2 \in \mathbb{F} θx1+(1−θ)x2∈F
则称 F \mathbb{F} F是一个凸集。简单描述,集合中任取两点连成的线段,若线段上所有的点都包含的集合里面则集合是凸集。
-
含有LMI的优化问题
{ min f 0 ( x ) s.t. x ∈ { x ∣ A ( x ) < 0 } ∩ F \begin{cases} \text{min} ~~ f_0(x)\\ \text{s.t.} ~~ x\in \{x|A(x)<0\} \cap \mathbb{F} \end{cases} {min f0(x)s.t. x∈{x∣A(x)<0}∩F
A ( x ) < 0 A(x)<0 A(x)<0 是LMI,且 F \mathbb{F} F是一个凸集。- 当目标函数
f
0
(
x
)
f_0(x)
f0(x)是凸函数时,此优化问题是凸优化问题;
- A ( x ) ≤ 0 A(x)\leq 0 A(x)≤0是一个凸集(利用凸集定义可证明)。
- 当目标函数
f
0
(
x
)
f_0(x)
f0(x)是凸函数时,此优化问题是凸优化问题;
-
涉及LMI的三个标准问题
大多数问题都可以转化为标准问题
-
可行性问题
找到一个解 x ∈ R n x\in\mathbb{R}^n x∈Rn满足如下LMI:
A ( x ) < B ( x ) A(x)<B(x) A(x)<B(x)当把 B ( x ) B(x) B(x)移动到不等式左边,令 F i = A i − B i , i = 0 , 1 , 2... , n F_i = A_i-B_i,i=0,1,2...,n Fi=Ai−Bi,i=0,1,2...,n,可以将上述LMI转化为标准LMI: F ( x ) < 0 F(x)<0 F(x)<0;
上述问题可以利用,MATLAB LMI Toolbox中 feasp 命令求解。
feasp 求解的时以下的带有LMI的辅助凸优化问题
{ min t s.t. A ( x ) < B ( x ) + t I \begin{cases} \text{min} ~~ t\\ \text{s.t.} ~~ A(x)<B(x)+tI \end{cases} {min ts.t. A(x)<B(x)+tI
根据矩阵特征值特性 λ max ( A ) < t ⟺ A − t I < 0 \lambda_{\text{max}}(A)<t \iff A-tI<0 λmax(A)<t⟺A−tI<0;上式表示为使得矩阵 A ( x ) − B ( x ) A(x)-B(x) A(x)−B(x)的特征值全小于 t t t,即矩阵为负定。因此,只有凸优化问题(22) t < 0 t<0 t<0时,存在严格可行解 x x x,使得矩阵 A ( x ) − B ( x ) < 0 A(x)-B(x)<0 A(x)−B(x)<0,使得 A ( x ) < B ( x ) A(x)<B(x) A(x)<B(x)成立。 -
凸最小化问题
给一个凸函数 f ( x ) f(x) f(x),找到一个解 x ∈ R n x\in\mathbb{R}^n x∈Rn满足以下带有LMI约束的最小化问题
{ min f ( x ) s.t. A ( x ) < B ( x ) \begin{cases} \text{min} ~~ f(x)\\ \text{s.t.}~~A(x)<B(x) \end{cases} {min f(x)s.t. A(x)<B(x)MATLAB LMI Toolbox中 mincx 命令求解
{ min c T x s.t. L ( x ) < R ( x ) \begin{cases} \text{min} ~~ c^Tx\\ \text{s.t.} ~~ L(x)<R(x) \end{cases} {min cTxs.t. L(x)<R(x) -
广义特征值问题
找到以下最小化问题的解 x ∈ R n x\in\mathbb{R}^n x∈Rn
{ min λ s.t. A ( x ) < λ B ( x ) B ( x ) > 0 C ( x ) > 0 \begin{cases} \text{min} ~~ \lambda\\ \text{s.t.}~~A(x)<\lambda B(x)\\ \qquad B(x)>0\\ \qquad C(x)>0 \end{cases} ⎩ ⎨ ⎧min λs.t. A(x)<λB(x)B(x)>0C(x)>0MATLAB LMI Toolbox中 gevp 命令求解
mincx 和 gevp 区别?凸最小化问题和广义特征值问题区别?
-
3. 线性矩阵不等式的发展

-
播种期(1890)
根源:求解一个正定矩阵 P P P使得 A T P + P A < 0 A^TP+PA<0 ATP+PA<0成立,保证线性系统 x ˙ ( t ) = A x ( t ) \dot x(t) =A x(t) x˙(t)=Ax(t)是渐进稳定的;
解决方法:Lyapunov通过选择一个正定矩阵 Q Q Q,通过求解Lyapunov方程 A T P + P A = − Q A^TP+PA=-Q ATP+PA=−Q,来显示求解 P P P矩阵。
-
生根期(1940-1970)
将李亚普诺夫LMI问题应用在实际的应用中;
提出了应用图形方法求解LMI;
-
成长期(1970-2000)
正实引理 —— 将很多问题转化为LMI形式
凸优化算法应用 —— 为LMI求解提供了成熟的求解工具
-
繁荣期(2000-现在)
在鲁棒控制等领域应用很广;
参考文献
[1] Duan, G.-R., & Yu, H.-H. (2013). LMIs in Control Systems: Analysis, Design and Applications (1st ed.). CRC Press. https://doi.org/10.1201/b15060, PDF:library.lol/main/1D9AAC1BED0618920BBED953215695E2 学习视频:https://www.bilibili.com/video/BV1jt411U7xj?p=1
[2] K.-Z. Liu and Y. Yao, Robust Control: Theory and Applications. Hoboken, NJ, USA: Wiley, 2016.文章来源:https://www.toymoban.com/news/detail-807334.html
[3] 刘金琨. 基于 LMI 的控制系统设计, 分析及 MATLAB 仿真[M]. 清华大学出版社, 2020.文章来源地址https://www.toymoban.com/news/detail-807334.html
1BED0618920BBED953215695E2](http://library.lol/main/1D9AAC1BED0618920BBED953215695E2) 学习视频:https://www.bilibili.com/video/BV1jt411U7xj?p=1
[2] K.-Z. Liu and Y. Yao, Robust Control: Theory and Applications. Hoboken, NJ, USA: Wiley, 2016.
[3] 刘金琨. 基于 LMI 的控制系统设计, 分析及 MATLAB 仿真[M]. 清华大学出版社, 2020.
到了这里,关于线性矩阵不等式(LMI)(一):简单介绍的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!









