🌞欢迎来到深度学习的世界
🌈博客主页:卿云阁💌欢迎关注🎉点赞👍收藏⭐️留言📝
🌟本文由卿云阁原创!
🙏作者水平很有限,如果发现错误,请留言轰炸哦!万分感谢!
1. 深度图
深度图中的单个像素值是空间中物体的某个点到垂直于左红外镜头光轴并通过镜头光心(深度相机光学零点)平面的垂直距离。
深度图是深度相机视野内所有点的深度数据构成的矩阵。深度图是一个16bit位深的单通道矩阵,单位为毫米。没有深度信息的点值为0。为直观的体现不同距离数值,在SDK提供的sample程序中,输出的深度图均被映射到了RGB色彩空间,所以显示出来的结果为RGB三通道8bit位深的位图,深度数据无外参,无畸变,只能提供用于转换点云数据的内参。
2.点云图
通过深度相机得到的物体外观表面的点数据集合是点云。使用深度相机得到的点云信息为三维坐标(X,Y,Z)。点云图是深度相机捕捉到的所有点的点云信息构成的数据矩阵。每点为3个float类型x,y,z值。没有三维空间信息的点为(0,0,0)。
点云图数据格式。
3. IR图
IR图像为红外图像传感器输出的红外图像。在输出深度图的时候,部分型号的相机输出的IR图像是被系统处理过的图像,如果需要看原始的IR图像,需要关闭深度图像输出。关闭深度图像输出后,激光投射器也会自动关闭。如果需要打开激光器,需主动调用SDK API关闭激光器的自动控制功能,并且设置激光机强度,才能看到正常的红外图像传感器图像。IR图像分为左IR图和右IR图,二者均包含内参和畸变参数,但是因为左IR和深度图是同一个空间坐标系,所以左IR图像无外参。文章来源:https://www.toymoban.com/news/detail-807841.html
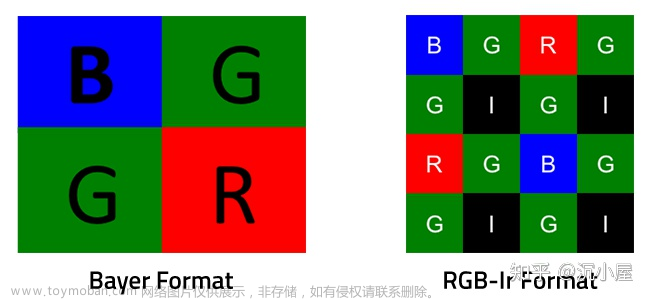
4. RGB图像
不同型号的Percipio相机会输出不同数据类型的RGB图像。其中一类RGB图像传感器含有硬件ISP模块,输出机为正常的YUV422/JPG图像,经OPENCV处理即可显示为RGB图像。另一类RGB图像传感器没有硬件ISP模块,输出的raw bayer图像数据显示为图像时,画面颜色”偏绿”,经过SDK的软件ISP处理(如白平衡),才可以显示为正常色彩空间的RGB图像; 没有硬件ISP模块的RGB图像传感器可以确保输出的图像数据与IR图像数据同步。RGB图像传感器组件提供了内参,外参数,畸变参数。文章来源地址https://www.toymoban.com/news/detail-807841.html


到了这里,关于3D视觉专用名词概念解释,深度图、点云图、IR图、RGB图像的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!