文章目录
处理自动驾驶数据
仿真自动驾驶场景
设计感知算法
设计规划和控制算法
生成代码和部署算法
集成和测试
参考文献
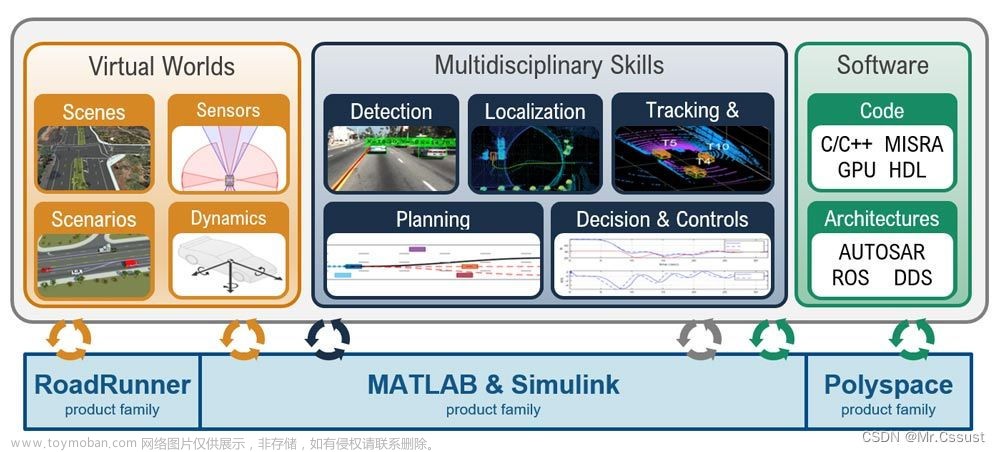
使用 MATLAB/Simulink开发自动驾驶,能够深入建模真实世界的行为、减少车辆测试并验证嵌入式软件的功能,从而推进自动驾驶感知、规划和控制系统的设计。主要包括以下几个方面的工作:
处理自动驾驶数据
使用MATLAB的 CAN 和 ROS接口访问实时的或者Record的驾驶数据。使用内置工具,可以可视化和标注导入的数据。例如,真值标注器界面能够可视化信号,并支持您以交互方式标注多个信号,也可以自动标注这些信号,并将标注的数据导出到工作区。地理地图方面的数据访问和可视化,需要配合使用 HERE 高清实时地图和 OpenStreetMap。数据处理的示例如下:

仿真自动驾驶场景
MATLAB与立方体以及虚幻引擎 (Unreal Engine) 仿真环境结合使用,可以在虚拟场景中开发和测试算法。立方体环境将交通参与者表示为简单图形,并使用概率传感器模型。可以将此环境用于控制、传感器融合和运动规划。
使用虚幻引擎环境,可以为感知和立方体环境用例开发算法。RoadRunner 可以支持自己设计仿真器中使用的场景,包括 CARLA、Vires VTD 和 NVIDIA Drive Sim等,并支持导出为行业标准文件格式,如 FBX 和 OpenDRIVE。设计驾驶场景的示例如下:

设计感知算法
MATLAB 和 Simulink可以使用来自相机、激光雷达和雷达的数据开发感知算法。感知算法包括检测、跟踪和定位,可用于自动制动、转向、地图构建和里程计等应用。还可以将这些算法作为 ADAS 应用的一部分来实现,如紧急制动和转向。使用 MATLAB,还可以开发用于传感器融合、同步定位与地图构建 (SLAM)、地图构建和里程计的算法。示例如下:

设计规划和控制算法
使用 MATLAB 和 Simulink,可以开发路径规划和控制算法。例如使用横向和纵向控制器设计车辆控制系统,使自主驾驶车辆能够遵循规划的轨迹。还可以使用传感器模型和车辆动力学模型,在二维和三维仿真环境中合成式地测试自己开发的算法。示例如下:

生成代码和部署算法
使用MATLAB 和 Simulink的代码生成工作流可以将感知、规划和控制算法部署到硬件。使用自动生成的代码,可以将传感器与其他 ECU 组件连接。支持多种部署目标,包括 NVIDIA、Intel、ARM 等品牌硬件。支持的代码生成语言包括 C、C++、CUDA、Verilog 和 VHDL®。也可以将算法部署到面向服务的架构中,如 ROS 和 AUTOSAR。示例如下:

集成和测试
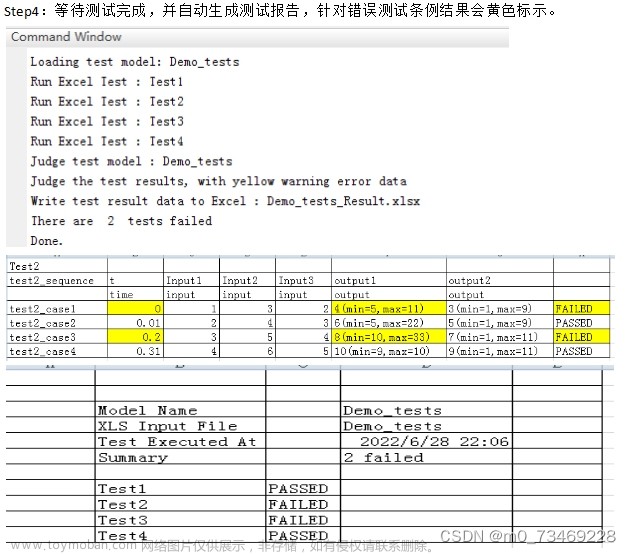
使用MATLAB 和 Simulink可以集成并测试自己开发的感知、规划和控制系统。使用 Requirements Toolbox,还可以提取和管理开发需求。也可以使用 Simulink Test 以并行方式运行和自动化测试用例。示例如下:

参考文献
《MathWorks自动驾驶解决方案》
版权声明,原创文章,转载和引用请注明出处和链接,侵权必究!文章来源:https://www.toymoban.com/news/detail-809350.html
文中部分图片来源自网络,若有侵权,联系立删。文章来源地址https://www.toymoban.com/news/detail-809350.html
到了这里,关于基于Matlab/Simulink开发自动驾驶的解决方案的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!