自动驾驶是人类智慧的结晶,它融合了多种高科技技术,包括传感器技术、计算机视觉、人工智能等,它让汽车具备了自主感知和决策的能力,可以在复杂多变的道路环境中自如应对。这种技术带给我们的不仅仅是出行的便利,更是对未来生活的美好憧憬。

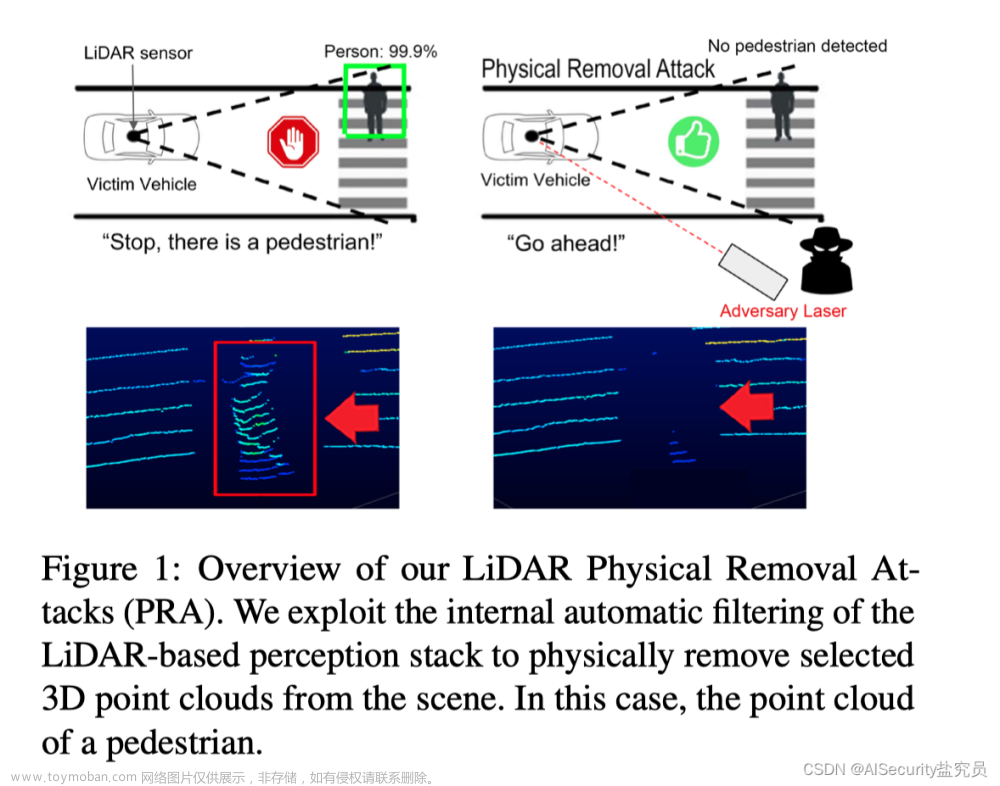
在自动驾驶汽车中二维激光雷达通过获取周围环境的三维点云数据,并通过对这些数据的处理和识别,实现了障碍物的检测。这种方法的精度较高,抗干扰能力强,因此在无人驾驶、机器人等领域得到了广泛的应用。
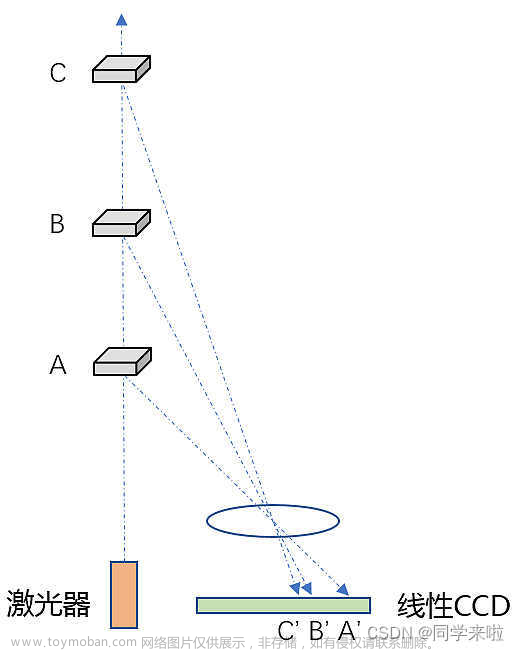
二维激光雷达通过扫描来测量汽车周边区域内的物体与自身之间的距离以及相对于自身坐标系的角度,而且还可以设置各种不同角度下的分辨率和扫描的频率,这将影响到表达每次输出光束的测量距离的方式。
为了能够及时收取雷达每次测量的数据,一般都会选用网络接口作为雷达与上机位之间的传输方式,首先建立一个IP连接雷达与上机位,雷达通过此连接接收上机位发送的扫描请求,然后雷达再通过网络接口按照人工设定好的频率向上机位传输数据。
二维激光雷达通常会安装在汽车周围来对周围路况以及道路状况进行检测,以解决三维激光雷达在检测中会出现的盲区。二维激光雷达检测障碍物原理是通过扫描的回波数据是经目标物体表面反射得到的返回数据,首先要保证障碍物具有一定的表面积,能够在二维激光雷达的扫描范围和角度分辨率下,有激光束到达障碍物表面并反射回数据从而获得障碍物距离及位置值等。
目前二维激光雷达主要应用于室内的结构化环境下,用于室内机器人的环境建模、定位以及障碍物检测等等。应用于室外环境的二维激光雷达一般功率要比用于室内的大很多,因为室外环境对于激光信息的影响因素较多。
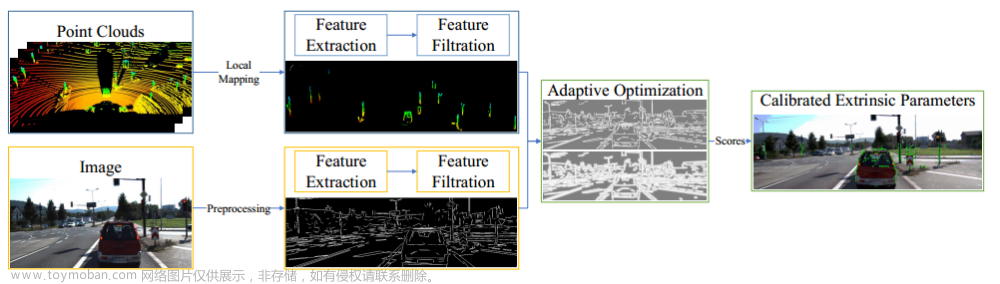
二维激光雷达在障碍物检测方面的工作原理是通过连续的旋转扫描,获得周围环境的高精度三维点云数据,然后通过对这些点云数据的处理和识别,实现障碍物的检测。
二维激光雷达通过发射激光束对周围环境进行扫描,当激光束遇到障碍物时,会被反射回来,被接收器接收。通过对每个激光点的距离和角度进行测量,可以获得每个点的三维坐标信息。
根据障碍物的位置、大小、形状等信息,对障碍物进行分类和识别。例如,可以利用Hough变换、模板匹配等技术,对障碍物进行识别和分类。
通过计算机视觉和图像处理技术,对这些点云数据进行处理和识别。例如,可以利用阈值分割、特征提取、聚类分析等算法,将点云数据中属于障碍物的部分提取出来。
 文章来源:https://www.toymoban.com/news/detail-809620.html
文章来源:https://www.toymoban.com/news/detail-809620.html
景颐光电激光雷达标定板可用于激光雷达的感知目标距离校准,让激光雷达更精准地判断周围故障物及其运动轨迹。常用于激光雷达定标的反射率有10%、50%和90%,如果定标精度要求比较高,还可定制更多的阶梯反射率。文章来源地址https://www.toymoban.com/news/detail-809620.html
到了这里,关于自动驾驶二维激光雷达标定板的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!