速度倍率变更的自定义,可以对在按住倍率键或者SHFT键的同时按下倍率键时的速度倍率的动作进行自定义。希望进行自定义时,在系统变量画面上选择$OVRD SETUP,分别独立设定在按住SHFT键的同时按下了倍率键时的动作,和不按SHFT键而按下了倍率键时的动作.系统变量.

$OVRD SETUP 1/4
1.$OVRD NUM 0
2.$OVERRIDE [10]of INTEGER
3.$OVRD NUM S 0
4.$OVERRIDE S [10]of INTEGER



1. $SCR.$FWDENBLOVRD倍率降低到设定值
2. 机器人中断停止,速度降下来需要再次加速度$SCR.$FENCEOVRD倍率降低到设定值
3. 自动强制设置速度$MCR_GRP[].$PRGOVERRIDE设定为100动作
4. 倍率再启动 $SCR.$RECOV_OVRD=TURE需要控制器启动
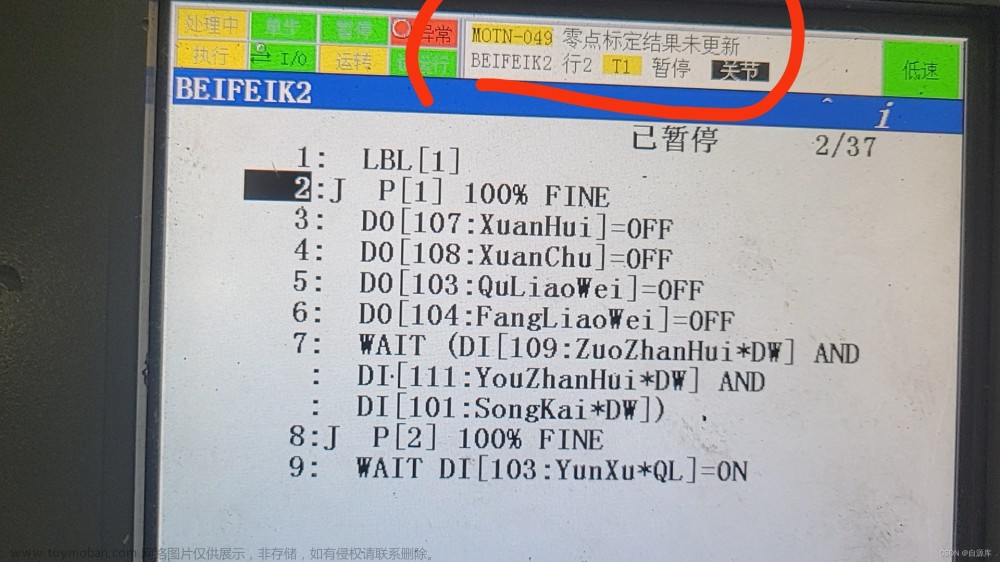
我们可以用上面的变量写一个后台逻辑程序,如果plc做主站,中途中报警则机器人停止,再启动每次需要往上加速度到100%,每次修改速度很麻烦。
 文章来源:https://www.toymoban.com/news/detail-810035.html
文章来源:https://www.toymoban.com/news/detail-810035.html
 文章来源地址https://www.toymoban.com/news/detail-810035.html
文章来源地址https://www.toymoban.com/news/detail-810035.html
到了这里,关于关于发那科机器人速度倍率再启动设置的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!