学习视频为【正点原子】手把手教你学FreeRTOS实时系统
RTOS 入门
裸机
裸机:前后台系统,前台系统指中断服务函数,后台系统指大循环。
裸机中断:是一瞬间的事情,不能处理太多问题。可以用来设置标志位,把执行函数放在主函数里面。
RTOS
1、高优先任务只有处于阻塞状态,才会让出CPU资源,来运行低优先级任务。
2、中断可以打断任意任务,因为中断是为硬件实现,任务优先级为软件实现。
任务优先级数字越大,优先级越高;而中断优先级数字越小,优先级越高
FreeRTOS
FreeRTOS官网
任务调度方式
抢占式调度(不同优先级)
时间片调度(同优先级)
在时间片调度中,一个时间片就是SysTick中断周期;没有用完的时间片不会再使
用。
协程式调度(逐渐淘汰)
任务状态
运行态(同一时间仅有一个任务处于运行态)
就绪态
阻塞态
挂起态 vTaskSuspend() 挂起, vTaskResume() 进入就绪

就绪列表 pxReadyTaskLists[x],其中x代表任务优先级数值
阻塞列表 pxDelayedTaskList
挂起列表 xSuspendTaskList
- 新创建任务直接挂载到就绪列表中
- 32位变量,当某个位置一时,代表所对应的优先级就绪列表有任务
FreeRTOS 移植
移植步骤细节根据《FreeRTOS开发指南》的第二章操作
Source文件夹
portable 文件夹是沟通起软件和硬件的桥梁
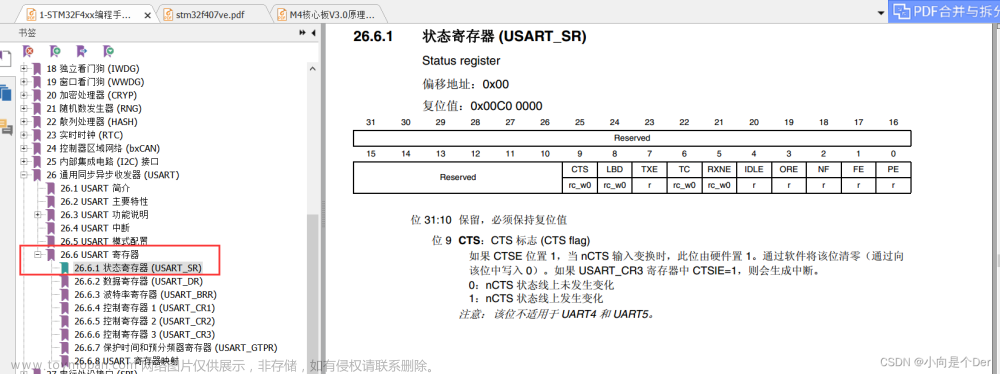
系统配置文件
《FreeRTOS开发指南》的第三章介绍
include 配置RTOS中可选的API函数
config 完成FreeRTOS的功能配置和裁剪
其他配置项 PendSV 宏定义、SVC宏定义
API函数
任务创建和删除
动态方式创建任务
xTaskCreate() 自动分配内存
- uxTaskGetStackHighWaterMark() 用于获取指定任务的任务栈的历史剩余最小值
- 任务切换是在中断中进行。可使用临界区保护 taskENTER_CRITICAL() 那些不想被打断的程序段。
- stm32 栈向下生长,由高地址向低地址;堆向上生长,由低地址向高地址。
任务控制块

任务栈栈顶,与任务切换有关
每个任务都有属于自己的任务控制块,类似身份证
静态方式创建任务
xTaskCreateStatic()
删除任务
vTaskDelete()
- 传入参数NULL,代表删除任务自身
- 空闲任务会负责释放被删除任务中由系统分配的内存(静态任务内存需由用户删除前提前释放)
任务挂起和恢复函数
| API函数 | 描述 |
|---|---|
| vTaskSuspend() | 挂起任务 |
| vTaskResume() | 恢复被挂起任务 |
| xTaskResumeFromISR() | 在中断中恢复被挂起的任务 |
xTaskResumeFromISR()函数官网例程
宏:INCLUDE_vTaskSuspend 须置为1
带 FromISR 后缀是在 中断函数 中专用的API函数。
使用该函数需要把 INCLUDE_xTaskResumeFromISR 置为1
中断服务程序中要调用freeRTOS的API函数,则中断优先级不能高于Free RTOS所管理的最高优先级
FreeRTOS 能管理的中断优先级为 5-15
官网解释
- 如果您使用 STM32 和 STM32 驱动器库, 请通过 调用 NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 ) 来确保所有优先级位都被指定为抢占优先级位,这一步需要 在启动 RTOS 前完成。
调度器挂起与恢复
临界区
临界段(临界区):必须完整运行,不能被打断的代码段
1、外设:IIC、SPI等需严格按照时序初始化的外设
2、系统或用户自身需求

1、可以嵌套使用 2、尽量保证临界段代码耗时短
临界区是直接屏蔽了中断,系统任务调度靠中断,ISR也靠中断
中断和任务调度可以打断当前程序的运行
任务调度器的挂起和恢复
挂起任务调度器,调用此函数不需要关闭中断。
仅仅是为了防止任务之间的资源争夺,中断照样可以直接响应。
| 函数 | 描述 |
|---|---|
| vTaskSuspendAll() | 挂起任务调度器,uxScheduleSuspend加一 |
| xTaskResumeAll() | 恢复任务调度器,uxScheduleSuspend减一 |
中断管理
中断:CPU打断正常运行的程序,转而去处理紧急的事件
关闭中断 portDISABLE_INTERRUPTS()
开启中断 portENABLE_INTERRUPTS()
中断优先级数值越小越优先,任务优先级数值越大越优先
调用 任务延时 vTaskDealy()会进入临界区,而在退出临界区代码时会开启中断
PendSV 和 SysTick 设置最低优先级。保证系统任务切换不会阻塞系统其他中断的响应
FreeRTOS的任务中 只能管理中断优先级在5-15的中断服务
列表和列表项
列表是 FreeRTOS 中的一个数据结构,列表被用来跟踪FreeRTOS中的任务。是一个双向环形链表。
列表项就是存放在列表中的项目
简介
列表结构体
uxNumberOflterms 不包含 xListEnd末尾列表项
列表项结构体
xItemValue 多用于按升序对列表中的列表项进行排序
迷你列表项
仅用于标记列表的末尾 和 挂载其他插入列表中的列表项
列表和列表项关系
列表相关API函数
| 函数 | 描述 |
|---|---|
| vListInitialise() | 初始化列表 |
| vListInitialiseItem() | 初始化列表项 |
| vListInsertEnd() | 列表末尾插入列表项 |
| vListInsert() | 列表插入列表项 |
| uxListRemove() | 列表移除列表项 |
vListInsertEnd() 插入到pxIndex指针所指向的列表项前面
参考文档《FreeRTOS开发指南》第七章
任务调度
提前阅读《CortexM3权威指南(中文版)》与《FreeRTOS开发指南》第八章
| 函数 | 描述 |
|---|---|
| vTaskStartScheduler() | 启动任务调度器 |
| xPortStartScheduler() | 启动任务调度器中与硬件架构相关的配置部分,以及启动第一个任务 |
| prvStartFirstTask() | 初始化启动第一个任务前的环境,主要是重新设置MSP指针,并使能全局中断 |
| vPortSVCHandler() | SVC 中断服务函数 |
在启动第一个任务前关闭中断,启动第一个任务时开启中断
任务切换的本质:CPU寄存器的切换
上下文切换:对任务A保存现场,对任务B恢复现场
任务切换的过程在PendSV中断服务函数里边完成
进程堆栈(psp)中断以外所使用的堆栈,所以保存的就是任务栈;主堆栈指针(msp)在中断内使用
时间片调度
同等优先级任务轮流享有相同的CPU时间(可设置),叫时间片,在FreeRTOS中,一个时间片就等于SysTick中断周期
宏configUSE_TIME_SLICING 和 configUSE_PREEMPTION 须置1
没有用完的时间片不会再使用,下次执行该任务还是按照一个时间片的时钟节拍运行
任务状态查询
参考《FreeRTOS 开发指南》第11章——FreeRTOS其他任务API函数
任务优先级范围为 0~31
task_num = uxTaskGetNumber0Tasks();
TaskStatus_t* status_array = 0;
/* 所需申请空间 = 任务数量*结构体大小
@param1: 指向TaskStatus_t结构体数组首地址
@param2: 接收信息的数组大小
@param3: 系统总运行时间,为NULL则省略总运行时间值
返回获取信息的任务数量
*/
status_array = mymalloc(SRAMIN, (sizeof(TaskStatus_t) * task_num));
task_num2 = uxTaskGetSystemState(status_array, task_num, NULL);

任务时间统计
滴答定时器: 用来为系统提供时钟节拍
时基定时器: 用于统计任务运行时间
使用流程
1、configGENERATE_RUN_TIME_STATES 置 1
2、configUSE_STATES_FORMATTING_FUNCTIONS 置1
2.1、portCONFIGURE_TIMER_FOR_RUNTIME_STATE() :用于初始化配置任务运行时间统计的时基定时器时基定时器的计时精度需高于系统时钟节拍精度的10至100倍
2.2、 portGET_RUN_TIME_COUNTER_VALUE() :用于获取该功能时基定时器计数的计数值
延时函数
| 函数 | 描述 |
|---|---|
| vTaskDelay() | 相对延时 |
| xTaskDelayUntil() | 绝对延时 |
相对延时:每次延时都是从执行函数 vTaskDelay() 开始,直到延时指定的时间结束
绝对延时:将整个任务的运行周期看成一个整体,适用于需要按照一定频率运行的任务 绝对延时适用于需要按照一定频率运行的任务
绝对延时适用于需要按照一定频率运行的任务
FreeRTOS 消息队列
队列
队列是任务到任务、任务到中断、中断到任务 数据交流的一种机制(消息传递)
队列中的每一个数据叫做“队列项目”,队列能够存储“队列项目”的最大数量称为队列的长度
全局变量的弊端:数据无保护,导致数据不安全,当多个任务同时对该变量操作时,数据易受损
写/读队列时 关闭中断,做好保护,防止多任务同时访问冲突
API 函数
| 函数 | 描述 |
|---|---|
| xQueueCreate() | 动态方式创建队列 |
| xQueueCreateStatic() | 静态方式创建 |
发送
接收
信号量
信号量是一种解决同步问题的机制,可以实现对共享资源的有序访问
二值信号量
本质时一个队列长度为1的队列,该队列就只有空和满两种情况。
通常用于互斥访问或任务同步,但有可能会导致优先级翻转的问题
事件标志组
事件标志位:用一个位,表示事件是否发生
事件标志组就是一组事件标志位的集合值为1,表示事件发生了;值为0,表示事件未发生
可以等待某一位成立,或者等待多位同时成立
任意任务或中断都可以读写这些位

同步函数 xEvenGroupSync()
任务通知
简介
任务通知:用来通知任务,任务控制块中的结构体成员变量 ulNotifiedValue 就是这个通知值。
任务通知的劣势:
1、无法发送数据给ISR
2、无法广播给多个任务,只能被指定的一个任务接收并处理
3、无法缓存多个数据
4、发送受阻不支持阻塞
任务控制块TCB,里边有两个结构体成员变量:
uint32_t ulNotifiedValue 用来表示通知值
uint8_t ucNotifyState 用来表示通知状态
注意:发送通知API函数可以用于任务和中断服务函数中;接收通知API函数只能用于任务中
发送通知相关API函数
软件定时器
硬件定时器:在中断服务函数中处理信息
软件定时器:在回调函数中处理信息
**注意:**软件定时器的超时回调函数是由软件定时器服务任务调用的,软件定时器的超时回调函数本身不是任务,因此不能在该回调函数中使用可能会导致任务阻塞的API函数。
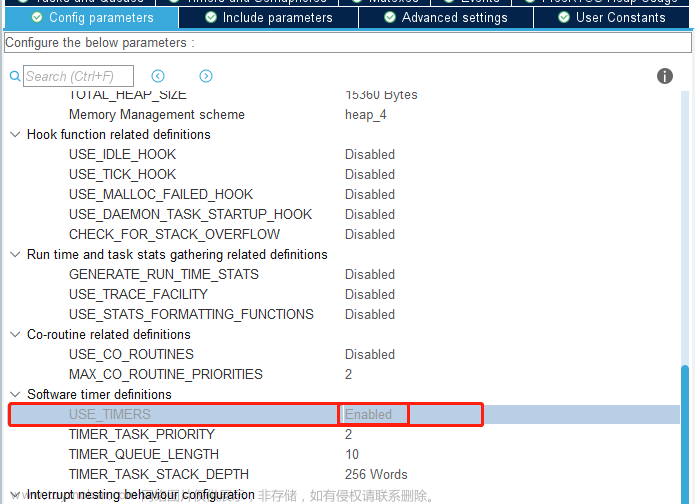
需将 configUSE_TIMERS 配置项配置成1
软件定时器服务任务的优先级为 configTIMER_TASK_PRIORITY = 31,及最高
定时器的命令队列长度为 configTIMER_QUEUE_LENGTH = 5
两种状态:休眠态,运行态新创建的软件定时器处于休眠态
xTimerDelete() 软件定时器删除
C语言知识补充
堆
一块空闲的内存
栈
主要用来存储地址和临时变量
指针函数与函数指针
| / | 指针函数 | 函数指针 |
|---|---|---|
| 主体 | 函数 | 指针 |
| 需求 | 返回类型为指针(地址) | 指向一个函数 |
| 形式 | void* f(int x, int y) | void (*f)(int x, int y) |
()的优先级大于*
define 和 typedef
define 多用于定义常量
typedef 多用于为已有的数据类型创建一个新的名称
句柄和指针
指针
指针 是 栈上 存储 指向堆上空间地址的 变量
句柄
通俗理解:Handle 门把手,通过门把手来操控门文章来源:https://www.toymoban.com/news/detail-810094.html
本质:是对 底层硬件实例的 指针的 引用。
句柄可以有效节约资源,更高效使用空间。文章来源地址https://www.toymoban.com/news/detail-810094.html
到了这里,关于FreeRTOS 学习相关笔记 附C语言内容补充的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!