前言
上一篇中,介绍了关于STM32F407的时钟系统,在了解了系统的时钟后,最重要的内容就是搞定定时器的操作,本文从最基本的定时器,也是内核里面自带的一个定时器——SysTick(系统滴答)来进行介绍。旨在搞清楚什么是系统滴答,系统滴答有什么用,系统滴答怎么用。
SysTick概述
SysTick这个词其实之前出现过,在介绍中断的时候,就是下面这个图,SysTick就出现了,看他的位置,在图中阴影部分内,也就是说,SysTick是内核里面的属于NVIC的一部分;不是类似USART、GPIO的片上外设,而是一个内核内的外设;看图中有个箭头指向了NVIC,说明它是可以像前面用过的EXTI、USART来产生中断的。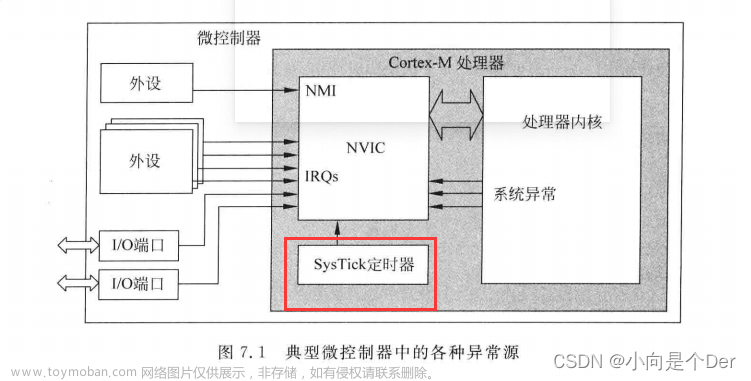
SysTick是个啥
关于是个啥这种问题,实在是不好表述,咱还是让官方来作答吧。
看了上面的描述,会有一个大致的概念,首先,它是一个可编程的系统定时器,其次,它被用来做延时和计时的操作,然后还可以触发中断。有一点需要纠正,上面说它是一个32位的自动递减计数器,这点有误,在STM32F407中,它是一个24位的自动递减计数器。
这里一直在说系统滴答是个定时器,那么定时器是个啥,直白点说,定时器就是一个按照时间规律递增或者递减的计数器,在STM32中这个时间规律就是时钟,例如,我们假设系统滴答的时钟是168MHZ;那么系统滴答这个定时器就会在一秒钟内,从0自增到168 000 000;同样的换个方向来理解,就是说计数器计满168000 000就是1s钟的时间。至于递减和递增,递减就是说计数器的初始有我们给定,然后计数器就从这个值开始做自减;而自增则是,我们给定值,然后计数器从0开始自增,一直增加到这个数。
好了,在有了一个大致的映像后,下面就来具体分析它的结构和功能。
SysTick结构框图
由于系统滴答是内部定时器,所以在ST公司的中文参考手册是找不到的,只有在ARM的权威指南中才可以找到相关描述,具体位置在M3和M4权威指南的第九章第五节。
下拉就可以看见系统框图:
还是按照老套路,把能够省略部分先噶了,这里可以很明显的看见最下面红框与上面的东西都没有联系,所以它是可以噶了的,他的作用就是校准SysTick的,一般来说,SysTick就是使用的系统时钟,如果这个不准了,那么多半这个单片机也命不久矣,所以这个东西可以直接不看。
去掉不需要看的,接下来就分模块一个部分一个部分的来介绍。
1. 时钟选择
如下图,左侧的红框代表的就是系统滴答的时钟输入选部分;绿色框内是一个二选一数据选择器,两个输入分别是处理器时钟以及经过上升沿检测的参考时钟;执行选择的是下方的“控制和状态寄存器的第2位”,具体的选择流程在寄存器部分会详细介绍。然后时钟就给到了计数器。
既然有两个输入的时钟,那么这两个时钟具体是指什么呢?
其一是处理器时钟,也就是我们说的主频,对于STM32F407来说对应168MHZ;那么另外一个参考时钟是什么呢?其实这个时钟在昨天的时钟树介绍中也出现了。如下图所示,橙色框中的到Cortex系统定时器的就是这里的参考时钟,可以发现,它经过了一个8分频的分频器,也就是说这个时钟的频率应该是168/8=21Mhz。

2.计数器部分
计数器简化后如下图所示,这是一个计数器的最基本结构,首先有三部分输入:
1.时钟基准:这个时钟直接决定了这个计数器多少时间执行一次计数;
2.重装载值:上方的重装载值直接决定了计数器的最大计数值;
3.控制部分:控制部分直接决定了计数器什么时刻开始计数,什么时候关闭计数,这里的第0位就是用来控制计数器是否计数的。
然后是输出部分,输出只有一个方向,就是4的位置,注意描述:当计数器从1减到0的时候会触发,而且这个触发是指向了“控制和状态寄存器”的,这就说明,当计数完成的时候,在“控制和状态寄存器”中会有对应的位,让我么来判断计时是否完成。
最后,最主要的部分,就是橙色框的24位向下计数器,它的作用就是隔一段时间将数值减一。当然,这里的明子就叫向下计数器,那么肯定还有对应的向上计数器,以及中心对齐的计数器,这个在后面基本通用和高级定时器中会碰到,遇到了再说。
3.中断部分
然后这个图还剩最后一部分,就是有关中断的了,这里有一个与门,与门的输入一个来自计数器技术完成后的标志,另一个来自“控制与状态寄存器”的第1位,也就是中断使能,说明在需要使用到中断的过程中,需要使能这个位才能开启中断。

工作一个计数周期(从重装载值减到0)的最大延时时间
弄清楚了上面的结构后,就可以计算出两个频率下,计数器工作一个周期,最长所需要花费的时间。
最大的重装载值:2^24=16777216
系统滴答具备两个时钟源:
内核时钟:主频提供时钟 168MHZ
最大的延时时长:1S16777216/168 000 000=0.09986S
0.09986s---->99.8ms
外部时钟:由AHB线提供 21MHZ
最大的延时时长:1S16777216/21 000 000=0.7989 S
0.7989s-----》798.9ms
工作流程
根据框图的分析,可以大致总结出系统滴答的初始化流程:
{
①选择时钟;
②根据自己所需时间计算出重装载值;
③使能计数器;
④判断对应的标志位是否到了,到了说明计时到了,没到说明计时还没到
}
SysTick寄存器
其实根据框图,寄存器也已经猜的七七八八了,还是具体的看一眼,关于系统滴答一共有四个寄存器。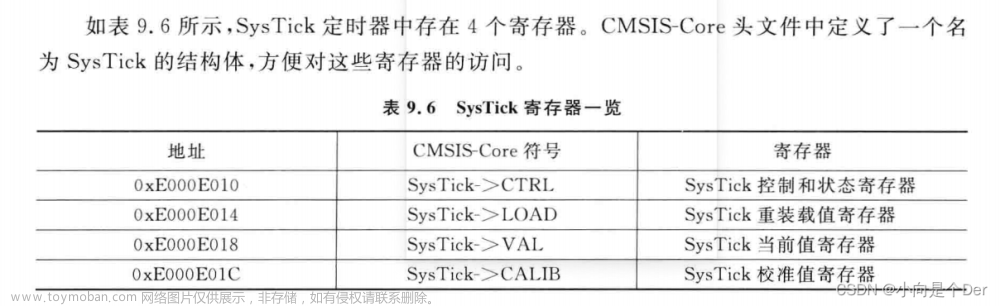
1.控制和状态寄存器SysTick->CTRL

写法:SysTick->CTRL
功能:对系统滴答定时器做控制,以及读取对应的状态
第0位:ENALEB
置1:使能计数器 一直重复工作
置0:失能计数器
第1位:中断使能位 计数标志一定会置1/中断标志
置1:使能中断
置0:失能中断
第2位:选择时钟源 默认1
置1:选择内核时钟 168MHZ
置0:外部参考时钟 21MHZ
第16位:标志位 只读
为1:计数器到0则返回1
为0:读取时清零
读取时的具体写法:
while(! (SysTick->CTRL & (1<<16)) );
2.重装载值寄存器SysTick->LOAD

写法: SysTick->LOAD
功能:提供计数器的最大值
用法:直接写入需要写入的最大计数值
不能超过最大的重装载值范围(0-1667216)
SysTick->LOAD=arr-1;
这个值具体写入多少,要结合需求,计算出大小
3.当前值寄存器SysTick->VAL
写法:SysTick->VAL
功能:存储计数器的当前值
读取这个寄存器:能够获取到计数器的当前值
写入这个寄存器:任意值都能清除计数标志位
4.校准值寄存器
在分析框图的时候提到过,这个一般不用。
配置流程
这里的配置流程分为两类:
其一是实现一个延时功能,延时功能只需要定时器工作一个周期,也就是从重装载值减到一的一个过程,执行一次后需要关闭定时器,不让他还会不停的从重装载值减到0然后又从重装载值减到0无限循环。
伪代码:
实现系统的us延时(参数)
{
//选择时钟 建议选择外部时钟
//写入重装载值 21*参数
//当前值清零
//打开计数器
//等待标志位置1
//关闭计数器
}
其二就是利用中断,一定时间进一次中断,以此来实现一个时间片轮询的操作方式。这时候,就需要定时器一直计数了,所以不能计数完成后就关闭计数器了。伪代码如下:
系统滴答的初始化代码
{
//选择系统滴答的时钟
//配置系统抵达的重装载值
//当前值清零
//打开中断使能
//NVIC控制器
//开启定时器
}
中断服务函数
{
判断标志;
清楚标志;
执行操作。
}
代码
#include "SysTick.h"
u16 SysTick_us;
u16 SysTick_ms;
/*******************************
函数名:SysTick_Init
函数功能:初始化系统滴答,选择外部时钟
函数形参:u32 sysclk 系统时钟168(MHZ)
函数返回值:void
备注:开启1ms中断
********************************/
void SysTick_Init(u32 sysclk) //168MHZ
{
u32 pri;//存储优先级合成函数返回的优先级
SysTick->CTRL &=~(1<<2); //选择外部时钟,必须清零默认是1内核时钟
SysTick_us=sysclk/8; //21 1us//外部时钟8分频
SysTick_ms=SysTick_us*1000; //21 000 1ms
SysTick->LOAD = SysTick_ms-1;//重装载值21000-1
SysTick->VAL=0; //清空计数器,清标志位
SysTick->CTRL |=1<<1; //使能中断
/*-----------------------配置NVIC---------------------------------------------*/
pri=NVIC_EncodePriority(7-2,1,2);
NVIC_SetPriority(SysTick_IRQn,pri);
NVIC_EnableIRQ(SysTick_IRQn);
SysTick->CTRL |=1<<0; //使能计数器
}
/*******************************
函数名:SysTick_Delay_us
函数功能:系统滴答实现us延时
函数形参:u32 nus
函数返回值:void
备注:
//因为LOAD为24位,所以最大重装载值16,777,216
最长时间:形参最大值,798,915us
********************************/
void SysTick_Delay_us(u32 nus)//1us
{
SysTick->LOAD =nus*SysTick_us;//传进来的参数*21 nus 传多少就是多少微秒
SysTick->VAL=0; //清空计数器,清标志位
SysTick->CTRL |=1<<0; //使能
while(!(SysTick->CTRL & 1<<16));//等待计数完成
SysTick->CTRL &=~(1<<0); //关闭计数器
SysTick->VAL=0; //清空计数器,清标志位
}
/*******************************
函数名:SysTick_Delay_ms
函数功能:系统滴答实现ms延时
函数形参:u32 nms
函数返回值:void
备注:
形参最大值798ms
********************************/
void SysTick_Delay_ms(u32 nms)
{
SysTick->LOAD =nms*SysTick_ms;//传进来的参数*21 nms 传多少就是多少毫秒
SysTick->VAL=0; //清空计数器,清标志位
SysTick->CTRL |=1<<0; //使能
while(!(SysTick->CTRL & 1<<16));//等待标志位到
SysTick->CTRL &=~(1<<0); //关闭计数器
SysTick->VAL=0; //清空计数器,清标志位
}
//中断服务函数:
/*******************************
函数名:SysTick_Handler
函数功能:系统滴答的中断服务函数函数
函数形参:无
函数返回值:void
备注:1ms进一次中断
********************************/
void SysTick_Handler(void)
{
static u8 i=100;
while(SysTick->CTRL &(1<<16))//检测中断标志,同时也是清除标志位
mtime--;
Led_cnt++;
_TIMER_1MS++;
i--;
if(i==0){
i = 100;
_TIMER_100MS ++;
}
}
利用系统滴答实现时间片轮询
使用时间片轮询的方式编程,可以很好地解决之前遇见的阻塞问题,在系统滴答里面定义好对应的计时变量,然后根据这个计时变量来执行所需要的操作。
如下图所示:这里笔者一共选取了三个时间变量分别计时1S、100ms、200ms,其中一秒钟的时序对应一次串口打印输出;100ms与200ms分别对应LED1和LED2的闪烁;除此之外还有一个轮询为0的情况用来存放不需要严格时序刷新的任务。
效果
最终效果如下:通过时间戳可以看出来SysTick的计时还是比较准准确的。
总结
系统滴答就是一个系统内的定时器,其主要作用就是提供精确延时以及计时的功能,可以借此实现时间片轮询的代码框架。文章来源:https://www.toymoban.com/news/detail-810464.html
M4系列目录
1.嵌入式学习笔记——概述
2.嵌入式学习笔记——基于Cortex-M的单片机介绍
3.嵌入式学习笔记——STM32单片机开发前的准备
4.嵌入式学习笔记——STM32硬件基础知识
5.嵌入式学习笔记——认识STM32的 GPIO口
6.嵌入式学习笔记——使用寄存器编程操作GPIO
7.嵌入式学习笔记——寄存器实现控制LED小灯
8.嵌入式学习笔记——使用寄存器编程实现按键输入功能
9.嵌入式学习笔记——STM32的USART通信概述
10.嵌入式学习笔记——STM32的USART相关寄存器介绍及其配置
11.嵌入式学习笔记——STM32的USART收发字符串及串口中断
12.嵌入式学习笔记——STM32的中断控制体系
13.嵌入式学习笔记——STM32寄存器编程实现外部中断
14.嵌入式学习笔记——STM32的时钟树
15.嵌入式学习笔记——SysTick(系统滴答)
16.嵌入式学习笔记——M4的基本定时器
17.嵌入式学习笔记——通用定时器
18.嵌入式学习笔记——PWM与输入捕获(上)
19.嵌入式学习笔记——PWM与输入捕获(下)
20.嵌入式学习笔记——ADC模数转换器
21.嵌入式学习笔记——DMA
22.嵌入式学习笔记——SPI通信
23.嵌入式学习笔记——SPI通信的应用
24嵌入式学习笔记——IIC通信文章来源地址https://www.toymoban.com/news/detail-810464.html
到了这里,关于嵌入式学习笔记——SysTick(系统滴答)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!

![软考-嵌入式系统设计师:[嵌入式系统基础:笔记(一)]](https://imgs.yssmx.com/Uploads/2024/01/401500-1.png)