今年开始学习foc控制无刷电机,这几天把所学整理一下,记录一下知识内容。
前言:
为什么要学习FOC?
1.电机控制是自动化控制领域重要一环。
2.目前直流无刷电机应用越来越广泛,如无人机、机械臂、云台、仿生机器人等等。
需要什么基础?
1.C语言,指针,结构体,编程规范。
2.STM32外设使用。
3.原理图阅读。
4.芯片手册阅读。
5.数序坐标系知识
为什么要出本教程?
1.直流无刷电机应用越来越广泛,网上资料比较散落,因此想要出一篇系统性的教程,从头到尾,深入浅出,帮助初学者快速入门直流无刷电机控制。
1、电机的分类

1.1、直流有刷电机
直流有刷电机(BDC)是一种内含电刷装置,可以将直流电能转换成机械能的电动机。
在允许的范围之内,只需要调整电压,即可调整它的转速,因此这类电机拥有良好的调速性
能。直流有刷电机实物图如图 3.2.1.1 所示
网上找到一张动态图片

电机系列:直流电机是如何工作的? - 知乎

1.2、直流无刷电机
无刷电机是指无电刷和换向器(或集电环)的电机,又称无换向器电机,它由电动机主
体和驱动器组成,是一种典型的机电一体化产品。 早在十九纪, 就已经出现了无刷形式的电
机,即交流鼠笼式异步电动机, 但是, 其有着许多无法克服的缺陷, 以至于人们不断地探索
更好的电机技术。 直到上世纪中叶, 晶体管诞生了,晶体管换向电路代替了传统的电刷与换
向器结构, 这种新型无刷电机克服了第一代无刷电机的缺陷。 直流无刷电机实物图如图
https://www.zhihu.com/zvideo/1381638054105477121


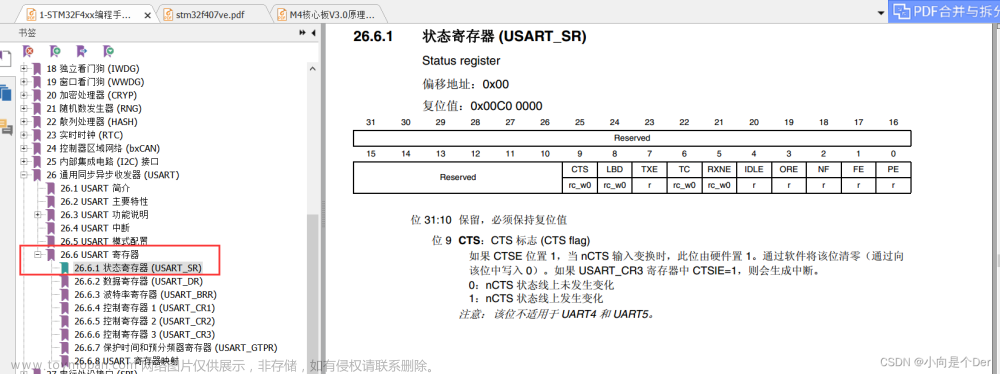
直流无刷电机又分为永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)和一般的BLDC电机
PMSM和BLDC的区别:
-
磁场分布:
- BLDC:通常具有一个方波磁场分布。这意味着其定子绕组产生的磁场是方波形式的。
- PMSM:具有正弦波磁场分布。这是因为PMSM的转子磁铁和定子绕组的设计使得其产生的磁场更接近正弦波形式。
-
扭矩脉冲:
- BLDC:由于方波磁场,BLDC电机在运行时可能会产生更显著的扭矩脉冲。
- PMSM:由于其正弦波磁场,PMSM通常能提供更平滑的扭矩输出。
-
控制策略:
- BLDC:经常使用比较简单的6步换相控制。
- PMSM:更适合使用正弦波控制或矢量控制(如FOC),这可以更好地匹配其正弦波磁场特性。
PMSM的特点:
- 高效率和性能:PMSM由于其正弦波磁场和优化的控制策略,通常能提供更高的效率和性能。
- 精确控制:PMSM非常适合于需要精确速度和位置控制的应用,这使其在伺服系统中非常受欢迎。
- 高转矩密度:PMSM通常具有较高的转矩密度,即在相同大小下可以提供更大的扭矩。
- 应用广泛:PMSM被广泛应用于工业伺服系统、电动汽车、精密机械和航空航天领域。
下图更直观的知道区别:


1.3、舵机
舵机是一种“特殊”的直流电机,其构造不仅只有电机部分,而且还自带一个控制器,
所以舵机本身就是一个闭环的控制系统(伺服系统)。 当我们给舵机发送指令信号时,它可
以将指令信号变换为输出轴的角度并保持住,即便是负载发生了变化,它也能够进行自动调
节。 舵机的实物图如图 3.2.3.1 所示:

1.4、步进电机
步进电机是一种将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序
控制系统中的主要执行元件,应用极为广泛。在非超载的情况下,步进电机的转速、停止的
位置只取决于脉冲信号的频率和脉冲个数,不受负载变化的影响。步进电机的实物图如图
3.2.4.1 所示

1.4、伺服电机
伺服电机是指在伺服系统中控制机械元件运转的电动机,它搭配上驱动器,形成一个完
整的伺服系统,就能够精准地控制速度、位置等。伺服电机具有线性度高、起动转矩大、运
行范围较广、无自转现象等显著特点,遗憾的是,就目前来说,一整套伺服系统的成本是相
对较高的。伺服电机和控制器的实物图如图 3.2.5.1 所示:

1.5、各类电机特点
| 电机类别 | 特点 |
| 直流有刷电机 | 驱动简单,成本低廉,但是噪音大, 故障较多, 寿命也相对较短。 |
| 直流无刷电机 | 噪音低,运转流畅,高速,寿命更长,但是控制较为复杂。 |
| 舵机 | 自成闭环控制系统, 角度控制优秀,价格低,但是带负载的能力较弱。 |
| 步进电机 | 结构简单,驱动方便,没有积累误差,不过因为其可能存在丢步现象, 常用于对精度要求不高的场合。 |
| 伺服电机 | 速度、位置控制精确,可低速运行,效率高,寿命长,可以说是目前最 为可靠的一类电机。但是价格较高。 |
1.6、电机常用名词
为了让大家可以更好地学习电机控制,搭建更健全的电机知识架构,下面我们先学习一
些电机常用名词:
① 转速:电机输出轴的速度,一般单位是 r/min(转每分钟),也常用 RPM 表示。
② 输出扭矩:表示了电机输出轴可以输出力的大小,单位一般为 N· m 或者 kg· cm。
③ 工作电压:电机正常工作的电压。
④ 额定电流:电机正常工作时的电流。
⑤ 堵转电流:电机负载过大,驱动力不足,发生堵转时的电流
参考文献:
正点原子的电机部分资料和网上资料
一文看懂有刷电机与无刷电机的工作原理及区别 - 知乎
FOC算法与SVPWM技术_深入浅出讲解foc算法与svpwm技术 pdf-CSDN博客
FOC基础知识:【自制FOC驱动器】深入浅出讲解FOC算法与SVPWM技术 - 知乎
SVPWM算法原理及详解_svpwm是什么意思-CSDN博客文章来源:https://www.toymoban.com/news/detail-811472.html
【STM32-HAL库】一步步搭建出FOC矢量控制(附C代码)_stm32foc全代码详解-CSDN博客文章来源地址https://www.toymoban.com/news/detail-811472.html
到了这里,关于stm32 FOC 电机介绍的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!



![[FOC-Simulink]使用Simulink代码生成工具基于STM32开发板对永磁同步电机进行开环控制](https://imgs.yssmx.com/Uploads/2024/02/648307-1.png)