目录
一、模块介绍
二、资料获取连接
欢迎关注微信公众号--星之援工作室 发送关键字(MAX30102)
三、接线方式
四、代码编写
main.c
max30102.c
max30102.h
myiic.c
myiic.h
algorithm.c
algorithm.h
五 、参考
一、模块介绍
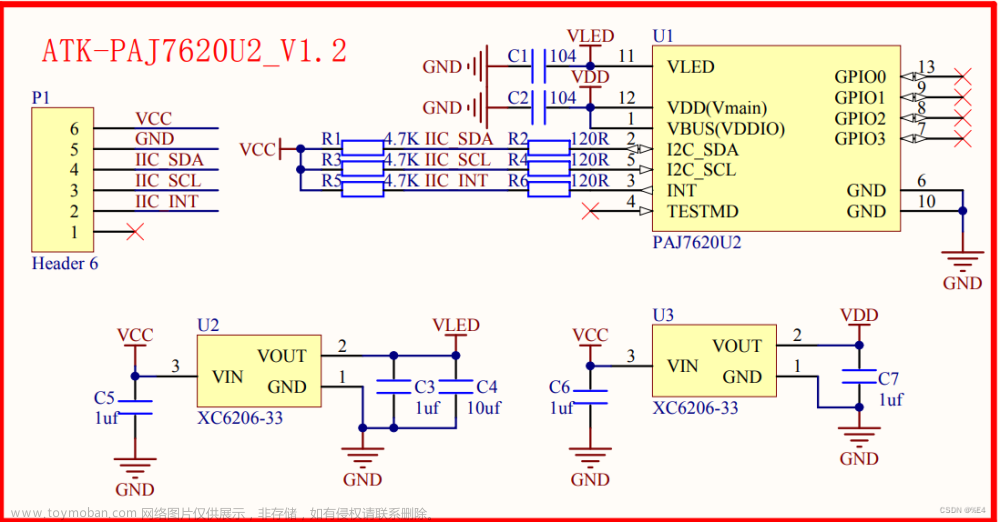
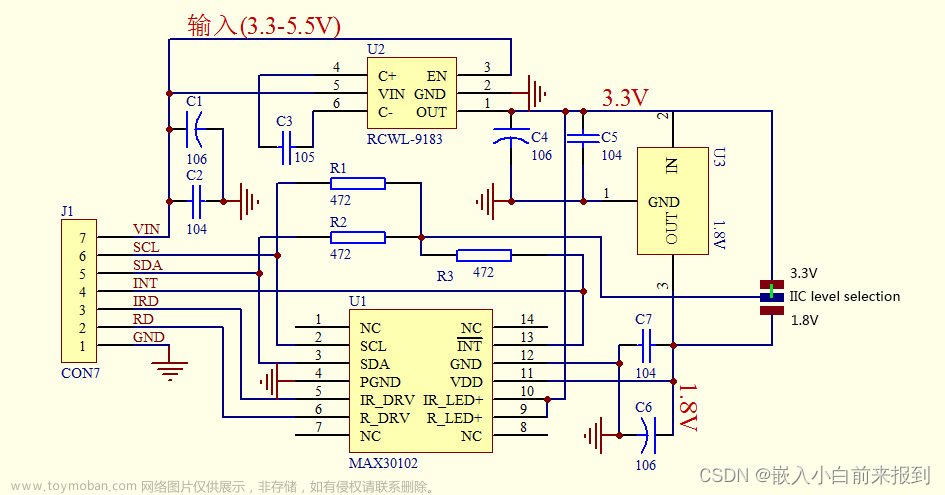
MAX30102模块是一种集成了光学传感器和信号处理器的模块,广泛应用于心率监测、脉搏氧饱和度监测以及其他生物参数检测等医疗领域。它具有高度集成、低功耗、高精度等特点,能够实时检测心率和血氧饱和度。 MAX30102模块内部集成了红外LED、红色光LED和光电检测器,通过红外LED和红色光LED照射皮肤,然后光电检测器采集反射光信号,进而进行血氧饱和度和心率的计算。模块还具有自动增益控制、环境光抑制和运动抑制等功能,能够有效去除干扰信号,提高监测精度。 MAX30102模块通常通过I2C总线与主控板进行通信,提供了许多可配置的参数,如采样速率、工作模式和各种滤波器等。模块还支持多种操作模式,包括连续测量模式、单次测量模式和间断测量模式,以满足不同应用需求。
二、资料获取连接
欢迎关注微信公众号--星之援工作室 发送关键字(MAX30102)

欢迎关注微信公众号星之援工作室,公众号不定时开源设计项目
支持单片机,Android系统设计成品定制,项目代做
请联系微信:13648103287
三、接线方式
 文章来源:https://www.toymoban.com/news/detail-813350.html
文章来源:https://www.toymoban.com/news/detail-813350.html
四、代码编写
main.c
uint32_t aun_ir_buffer[500]; //IR LED sensor data
int32_t n_ir_buffer_length; //data length
uint32_t aun_red_buffer[500]; //Red LED sensor data
int32_t n_sp02; //SPO2 value
int8_t ch_spo2_valid; //indicator to show if the SP02 calculation is valid
int32_t n_heart_rate; //heart rate value
int8_t ch_hr_valid; //indicator to show if the heart rate calculation is valid
uint8_t uch_dummy;
#define MAX_BRIGHTNESS 255
void dis_DrawCurve(u32* data,u8 x);
int main(void)
{
//variables to calculate the on-board LED brightness that reflects the heartbeats
uint32_t un_min, un_max, un_prev_data;
int i;
int32_t n_brightness;
float f_temp;
u8 temp_num=0;
u8 temp[6];
u8 str[100];
u8 dis_hr=0,dis_spo2=0;
char string[100];
NVIC_Configuration();
delay_init(); //延时函数初始化
uart_init(115200); //串口初始化为115200
LED_Init();
max30102_init();
printf("\r\n MAX30102 init \r\n");
un_min=0x3FFFF;
un_max=0;
n_ir_buffer_length=500; //buffer length of 100 stores 5 seconds of samples running at 100sps
//read the first 500 samples, and determine the signal range
for(i=0;i<n_ir_buffer_length;i++)
{
while(MAX30102_INT==1); //wait until the interrupt pin asserts
max30102_FIFO_ReadBytes(REG_FIFO_DATA,temp);
aun_red_buffer[i] = (long)((long)((long)temp[0]&0x03)<<16) | (long)temp[1]<<8 | (long)temp[2]; // Combine values to get the actual number
aun_ir_buffer[i] = (long)((long)((long)temp[3] & 0x03)<<16) |(long)temp[4]<<8 | (long)temp[5]; // Combine values to get the actual number
if(un_min>aun_red_buffer[i])
un_min=aun_red_buffer[i]; //update signal min
if(un_max<aun_red_buffer[i])
un_max=aun_red_buffer[i]; //update signal max
}
un_prev_data=aun_red_buffer[i];
//calculate heart rate and SpO2 after first 500 samples (first 5 seconds of samples)
maxim_heart_rate_and_oxygen_saturation(aun_ir_buffer, n_ir_buffer_length, aun_red_buffer, &n_sp02, &ch_spo2_valid, &n_heart_rate, &ch_hr_valid);
while(1)
{
i=0;
un_min=0x3FFFF;
un_max=0;
//dumping the first 100 sets of samples in the memory and shift the last 400 sets of samples to the top
for(i=100;i<500;i++)
{
aun_red_buffer[i-100]=aun_red_buffer[i];
aun_ir_buffer[i-100]=aun_ir_buffer[i];
//update the signal min and max
if(un_min>aun_red_buffer[i])
un_min=aun_red_buffer[i];
if(un_max<aun_red_buffer[i])
un_max=aun_red_buffer[i];
}
//take 100 sets of samples before calculating the heart rate.
for(i=400;i<500;i++)
{
un_prev_data=aun_red_buffer[i-1];
while(MAX30102_INT==1);
max30102_FIFO_ReadBytes(REG_FIFO_DATA,temp);
aun_red_buffer[i] = (long)((long)((long)temp[0]&0x03)<<16) | (long)temp[1]<<8 | (long)temp[2]; // Combine values to get the actual number
aun_ir_buffer[i] = (long)((long)((long)temp[3] & 0x03)<<16) |(long)temp[4]<<8 | (long)temp[5]; // Combine values to get the actual number
if(aun_red_buffer[i]>un_prev_data)
{
f_temp=aun_red_buffer[i]-un_prev_data;
f_temp/=(un_max-un_min);
f_temp*=MAX_BRIGHTNESS;
n_brightness-=(int)f_temp;
if(n_brightness<0)
n_brightness=0;
}
else
{
f_temp=un_prev_data-aun_red_buffer[i];
f_temp/=(un_max-un_min);
f_temp*=MAX_BRIGHTNESS;
n_brightness+=(int)f_temp;
if(n_brightness>MAX_BRIGHTNESS)
n_brightness=MAX_BRIGHTNESS;
}
//send samples and calculation result to terminal program through UART
if(ch_hr_valid == 1 && n_heart_rate<120)//**/ ch_hr_valid == 1 && ch_spo2_valid ==1 && n_heart_rate<120 && n_sp02<101
{
dis_hr = n_heart_rate;
dis_spo2 = n_sp02;
}
else
{
dis_hr = 0;
dis_spo2 = 0;
}
printf("HR=%i, ", n_heart_rate);
printf("HRvalid=%i, ", ch_hr_valid);
printf("SpO2=%i, ", n_sp02);
printf("SPO2Valid=%i\r\n", ch_spo2_valid);
}
maxim_heart_rate_and_oxygen_saturation(aun_ir_buffer, n_ir_buffer_length, aun_red_buffer, &n_sp02, &ch_spo2_valid, &n_heart_rate, &ch_hr_valid);
}
}max30102.c
#include "max30102.h"
#include "myiic.h"
#include "delay.h"
u8 max30102_Bus_Write(u8 Register_Address, u8 Word_Data)
{
/* 采用串行EEPROM随即读取指令序列,连续读取若干字节 */
/* 第1步:发起I2C总线启动信号 */
IIC_Start();
/* 第2步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
IIC_Send_Byte(max30102_WR_address | I2C_WR); /* 此处是写指令 */
/* 第3步:发送ACK */
if (IIC_Wait_Ack() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第4步:发送字节地址 */
IIC_Send_Byte(Register_Address);
if (IIC_Wait_Ack() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第5步:开始写入数据 */
IIC_Send_Byte(Word_Data);
/* 第6步:发送ACK */
if (IIC_Wait_Ack() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 发送I2C总线停止信号 */
IIC_Stop();
return 1; /* 执行成功 */
cmd_fail: /* 命令执行失败后,切记发送停止信号,避免影响I2C总线上其他设备 */
/* 发送I2C总线停止信号 */
IIC_Stop();
return 0;
}
u8 max30102_Bus_Read(u8 Register_Address)
{
u8 data;
/* 第1步:发起I2C总线启动信号 */
IIC_Start();
/* 第2步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
IIC_Send_Byte(max30102_WR_address | I2C_WR); /* 此处是写指令 */
/* 第3步:发送ACK */
if (IIC_Wait_Ack() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第4步:发送字节地址, */
IIC_Send_Byte((uint8_t)Register_Address);
if (IIC_Wait_Ack() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第6步:重新启动I2C总线。下面开始读取数据 */
IIC_Start();
/* 第7步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
IIC_Send_Byte(max30102_WR_address | I2C_RD); /* 此处是读指令 */
/* 第8步:发送ACK */
if (IIC_Wait_Ack() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第9步:读取数据 */
{
data = IIC_Read_Byte(0); /* 读1个字节 */
IIC_NAck(); /* 最后1个字节读完后,CPU产生NACK信号(驱动SDA = 1) */
}
/* 发送I2C总线停止信号 */
IIC_Stop();
return data; /* 执行成功 返回data值 */
cmd_fail: /* 命令执行失败后,切记发送停止信号,避免影响I2C总线上其他设备 */
/* 发送I2C总线停止信号 */
IIC_Stop();
return 0;
}
void max30102_FIFO_ReadWords(u8 Register_Address,u16 Word_Data[][2],u8 count)
{
u8 i=0;
u8 no = count;
u8 data1, data2;
/* 第1步:发起I2C总线启动信号 */
IIC_Start();
/* 第2步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
IIC_Send_Byte(max30102_WR_address | I2C_WR); /* 此处是写指令 */
/* 第3步:发送ACK */
if (IIC_Wait_Ack() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第4步:发送字节地址, */
IIC_Send_Byte((uint8_t)Register_Address);
if (IIC_Wait_Ack() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第6步:重新启动I2C总线。下面开始读取数据 */
IIC_Start();
/* 第7步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
IIC_Send_Byte(max30102_WR_address | I2C_RD); /* 此处是读指令 */
/* 第8步:发送ACK */
if (IIC_Wait_Ack() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第9步:读取数据 */
while (no)
{
data1 = IIC_Read_Byte(0);
IIC_Ack();
data2 = IIC_Read_Byte(0);
IIC_Ack();
Word_Data[i][0] = (((u16)data1 << 8) | data2); //
data1 = IIC_Read_Byte(0);
IIC_Ack();
data2 = IIC_Read_Byte(0);
if(1==no)
IIC_NAck(); /* 最后1个字节读完后,CPU产生NACK信号(驱动SDA = 1) */
else
IIC_Ack();
Word_Data[i][1] = (((u16)data1 << 8) | data2);
no--;
i++;
}
/* 发送I2C总线停止信号 */
IIC_Stop();
cmd_fail: /* 命令执行失败后,切记发送停止信号,避免影响I2C总线上其他设备 */
/* 发送I2C总线停止信号 */
IIC_Stop();
}
void max30102_FIFO_ReadBytes(u8 Register_Address,u8* Data)
{
max30102_Bus_Read(REG_INTR_STATUS_1);
max30102_Bus_Read(REG_INTR_STATUS_2);
/* 第1步:发起I2C总线启动信号 */
IIC_Start();
/* 第2步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
IIC_Send_Byte(max30102_WR_address | I2C_WR); /* 此处是写指令 */
/* 第3步:发送ACK */
if (IIC_Wait_Ack() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第4步:发送字节地址, */
IIC_Send_Byte((uint8_t)Register_Address);
if (IIC_Wait_Ack() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第6步:重新启动I2C总线。下面开始读取数据 */
IIC_Start();
/* 第7步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
IIC_Send_Byte(max30102_WR_address | I2C_RD); /* 此处是读指令 */
/* 第8步:发送ACK */
if (IIC_Wait_Ack() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第9步:读取数据 */
Data[0] = IIC_Read_Byte(1);
Data[1] = IIC_Read_Byte(1);
Data[2] = IIC_Read_Byte(1);
Data[3] = IIC_Read_Byte(1);
Data[4] = IIC_Read_Byte(1);
Data[5] = IIC_Read_Byte(0);
/* 最后1个字节读完后,CPU产生NACK信号(驱动SDA = 1) */
/* 发送I2C总线停止信号 */
IIC_Stop();
cmd_fail: /* 命令执行失败后,切记发送停止信号,避免影响I2C总线上其他设备 */
/* 发送I2C总线停止信号 */
IIC_Stop();
// u8 i;
// u8 fifo_wr_ptr;
// u8 firo_rd_ptr;
// u8 number_tp_read;
// //Get the FIFO_WR_PTR
// fifo_wr_ptr = max30102_Bus_Read(REG_FIFO_WR_PTR);
// //Get the FIFO_RD_PTR
// firo_rd_ptr = max30102_Bus_Read(REG_FIFO_RD_PTR);
//
// number_tp_read = fifo_wr_ptr - firo_rd_ptr;
//
// //for(i=0;i<number_tp_read;i++){
// if(number_tp_read>0){
// IIC_ReadBytes(max30102_WR_address,REG_FIFO_DATA,Data,6);
// }
//max30102_Bus_Write(REG_FIFO_RD_PTR,fifo_wr_ptr);
}
void max30102_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOB, &GPIO_InitStructure);
IIC_Init();
max30102_reset();
// max30102_Bus_Write(REG_MODE_CONFIG, 0x0b); //mode configuration : temp_en[3] MODE[2:0]=010 HR only enabled 011 SP02 enabled
// max30102_Bus_Write(REG_INTR_STATUS_2, 0xF0); //open all of interrupt
// max30102_Bus_Write(REG_INTR_STATUS_1, 0x00); //all interrupt clear
// max30102_Bus_Write(REG_INTR_ENABLE_2, 0x02); //DIE_TEMP_RDY_EN
// max30102_Bus_Write(REG_TEMP_CONFIG, 0x01); //SET TEMP_EN
// max30102_Bus_Write(REG_SPO2_CONFIG, 0x47); //SPO2_SR[4:2]=001 100 per second LED_PW[1:0]=11 16BITS
// max30102_Bus_Write(REG_LED1_PA, 0x47);
// max30102_Bus_Write(REG_LED2_PA, 0x47);
max30102_Bus_Write(REG_INTR_ENABLE_1,0xc0); // INTR setting
max30102_Bus_Write(REG_INTR_ENABLE_2,0x00);
max30102_Bus_Write(REG_FIFO_WR_PTR,0x00); //FIFO_WR_PTR[4:0]
max30102_Bus_Write(REG_OVF_COUNTER,0x00); //OVF_COUNTER[4:0]
max30102_Bus_Write(REG_FIFO_RD_PTR,0x00); //FIFO_RD_PTR[4:0]
max30102_Bus_Write(REG_FIFO_CONFIG,0x0f); //sample avg = 1, fifo rollover=false, fifo almost full = 17
max30102_Bus_Write(REG_MODE_CONFIG,0x03); //0x02 for Red only, 0x03 for SpO2 mode 0x07 multimode LED
max30102_Bus_Write(REG_SPO2_CONFIG,0x27); // SPO2_ADC range = 4096nA, SPO2 sample rate (100 Hz), LED pulseWidth (400uS)
max30102_Bus_Write(REG_LED1_PA,0x24); //Choose value for ~ 7mA for LED1
max30102_Bus_Write(REG_LED2_PA,0x24); // Choose value for ~ 7mA for LED2
max30102_Bus_Write(REG_PILOT_PA,0x7f); // Choose value for ~ 25mA for Pilot LED
// // Interrupt Enable 1 Register. Set PPG_RDY_EN (data available in FIFO)
// max30102_Bus_Write(0x2, 1<<6);
// // FIFO configuration register
// // SMP_AVE: 16 samples averaged per FIFO sample
// // FIFO_ROLLOVER_EN=1
// //max30102_Bus_Write(0x8, 1<<4);
// max30102_Bus_Write(0x8, (0<<5) | 1<<4);
// // Mode Configuration Register
// // SPO2 mode
// max30102_Bus_Write(0x9, 3);
// // SPO2 Configuration Register
// max30102_Bus_Write(0xa,
// (3<<5) // SPO2_ADC_RGE 2 = full scale 8192 nA (LSB size 31.25pA); 3 = 16384nA
// | (1<<2) // sample rate: 0 = 50sps; 1 = 100sps; 2 = 200sps
// | (3<<0) // LED_PW 3 = 411μs, ADC resolution 18 bits
// );
// // LED1 (red) power (0 = 0mA; 255 = 50mA)
// max30102_Bus_Write(0xc, 0xb0);
// // LED (IR) power
// max30102_Bus_Write(0xd, 0xa0);
}
void max30102_reset(void)
{
max30102_Bus_Write(REG_MODE_CONFIG,0x40);
max30102_Bus_Write(REG_MODE_CONFIG,0x40);
}
void maxim_max30102_write_reg(uint8_t uch_addr, uint8_t uch_data)
{
// char ach_i2c_data[2];
// ach_i2c_data[0]=uch_addr;
// ach_i2c_data[1]=uch_data;
//
// IIC_WriteBytes(I2C_WRITE_ADDR, ach_i2c_data, 2);
IIC_Write_One_Byte(I2C_WRITE_ADDR,uch_addr,uch_data);
}
void maxim_max30102_read_reg(uint8_t uch_addr, uint8_t *puch_data)
{
// char ch_i2c_data;
// ch_i2c_data=uch_addr;
// IIC_WriteBytes(I2C_WRITE_ADDR, &ch_i2c_data, 1);
//
// i2c.read(I2C_READ_ADDR, &ch_i2c_data, 1);
//
// *puch_data=(uint8_t) ch_i2c_data;
IIC_Read_One_Byte(I2C_WRITE_ADDR,uch_addr,puch_data);
}
void maxim_max30102_read_fifo(uint32_t *pun_red_led, uint32_t *pun_ir_led)
{
uint32_t un_temp;
unsigned char uch_temp;
char ach_i2c_data[6];
*pun_red_led=0;
*pun_ir_led=0;
//read and clear status register
maxim_max30102_read_reg(REG_INTR_STATUS_1, &uch_temp);
maxim_max30102_read_reg(REG_INTR_STATUS_2, &uch_temp);
IIC_ReadBytes(I2C_WRITE_ADDR,REG_FIFO_DATA,(u8 *)ach_i2c_data,6);
un_temp=(unsigned char) ach_i2c_data[0];
un_temp<<=16;
*pun_red_led+=un_temp;
un_temp=(unsigned char) ach_i2c_data[1];
un_temp<<=8;
*pun_red_led+=un_temp;
un_temp=(unsigned char) ach_i2c_data[2];
*pun_red_led+=un_temp;
un_temp=(unsigned char) ach_i2c_data[3];
un_temp<<=16;
*pun_ir_led+=un_temp;
un_temp=(unsigned char) ach_i2c_data[4];
un_temp<<=8;
*pun_ir_led+=un_temp;
un_temp=(unsigned char) ach_i2c_data[5];
*pun_ir_led+=un_temp;
*pun_red_led&=0x03FFFF; //Mask MSB [23:18]
*pun_ir_led&=0x03FFFF; //Mask MSB [23:18]
}
max30102.h
#ifndef __MYIIC_H
#define __MYIIC_H
#include "sys.h"
//
#define MAX30102_INT PBin(9)
#define I2C_WR 0 /* 写控制bit */
#define I2C_RD 1 /* 读控制bit */
#define max30102_WR_address 0xAE
#define I2C_WRITE_ADDR 0xAE
#define I2C_READ_ADDR 0xAF
//register addresses
#define REG_INTR_STATUS_1 0x00
#define REG_INTR_STATUS_2 0x01
#define REG_INTR_ENABLE_1 0x02
#define REG_INTR_ENABLE_2 0x03
#define REG_FIFO_WR_PTR 0x04
#define REG_OVF_COUNTER 0x05
#define REG_FIFO_RD_PTR 0x06
#define REG_FIFO_DATA 0x07
#define REG_FIFO_CONFIG 0x08
#define REG_MODE_CONFIG 0x09
#define REG_SPO2_CONFIG 0x0A
#define REG_LED1_PA 0x0C
#define REG_LED2_PA 0x0D
#define REG_PILOT_PA 0x10
#define REG_MULTI_LED_CTRL1 0x11
#define REG_MULTI_LED_CTRL2 0x12
#define REG_TEMP_INTR 0x1F
#define REG_TEMP_FRAC 0x20
#define REG_TEMP_CONFIG 0x21
#define REG_PROX_INT_THRESH 0x30
#define REG_REV_ID 0xFE
#define REG_PART_ID 0xFF
void max30102_init(void);
void max30102_reset(void);
u8 max30102_Bus_Write(u8 Register_Address, u8 Word_Data);
u8 max30102_Bus_Read(u8 Register_Address);
void max30102_FIFO_ReadWords(u8 Register_Address,u16 Word_Data[][2],u8 count);
void max30102_FIFO_ReadBytes(u8 Register_Address,u8* Data);
void maxim_max30102_write_reg(uint8_t uch_addr, uint8_t uch_data);
void maxim_max30102_read_reg(uint8_t uch_addr, uint8_t *puch_data);
void maxim_max30102_read_fifo(uint32_t *pun_red_led, uint32_t *pun_ir_led);
#endif
myiic.c
#include "myiic.h"
#include "delay.h"
//初始化IIC
void IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
//RCC->APB2ENR|=1<<4;//先使能外设IO PORTC时钟
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7|GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
IIC_SCL=1;
IIC_SDA=1;
}
//产生IIC起始信号
void IIC_Start(void)
{
SDA_OUT(); //sda线输出
IIC_SDA=1;
IIC_SCL=1;
delay_us(4);
IIC_SDA=0;//START:when CLK is high,DATA change form high to low
delay_us(4);
IIC_SCL=0;//钳住I2C总线,准备发送或接收数据
}
//产生IIC停止信号
void IIC_Stop(void)
{
SDA_OUT();//sda线输出
IIC_SCL=0;
IIC_SDA=0;//STOP:when CLK is high DATA change form low to high
delay_us(4);
IIC_SCL=1;
IIC_SDA=1;//发送I2C总线结束信号
delay_us(4);
}
//等待应答信号到来
//返回值:1,接收应答失败
// 0,接收应答成功
u8 IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
SDA_IN(); //SDA设置为输入
IIC_SDA=1;delay_us(1);
IIC_SCL=1;delay_us(1);
while(READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
IIC_Stop();
return 1;
}
}
IIC_SCL=0;//时钟输出0
return 0;
}
//产生ACK应答
void IIC_Ack(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=0;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//不产生ACK应答
void IIC_NAck(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=1;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void IIC_Send_Byte(u8 txd)
{
u8 t;
SDA_OUT();
IIC_SCL=0;//拉低时钟开始数据传输
for(t=0;t<8;t++)
{
IIC_SDA=(txd&0x80)>>7;
txd<<=1;
delay_us(2); //对TEA5767这三个延时都是必须的
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
delay_us(2);
}
}
//读1个字节,ack=1时,发送ACK,ack=0,发送nACK
u8 IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
SDA_IN();//SDA设置为输入
for(i=0;i<8;i++ )
{
IIC_SCL=0;
delay_us(2);
IIC_SCL=1;
receive<<=1;
if(READ_SDA)receive++;
delay_us(1);
}
if (!ack)
IIC_NAck();//发送nACK
else
IIC_Ack(); //发送ACK
return receive;
}
void IIC_WriteBytes(u8 WriteAddr,u8* data,u8 dataLength)
{
u8 i;
IIC_Start();
IIC_Send_Byte(WriteAddr); //发送写命令
IIC_Wait_Ack();
for(i=0;i<dataLength;i++)
{
IIC_Send_Byte(data[i]);
IIC_Wait_Ack();
}
IIC_Stop();//产生一个停止条件
delay_ms(10);
}
void IIC_ReadBytes(u8 deviceAddr, u8 writeAddr,u8* data,u8 dataLength)
{
u8 i;
IIC_Start();
IIC_Send_Byte(deviceAddr); //发送写命令
IIC_Wait_Ack();
IIC_Send_Byte(writeAddr);
IIC_Wait_Ack();
IIC_Send_Byte(deviceAddr|0X01);//进入接收模式
IIC_Wait_Ack();
for(i=0;i<dataLength-1;i++)
{
data[i] = IIC_Read_Byte(1);
}
data[dataLength-1] = IIC_Read_Byte(0);
IIC_Stop();//产生一个停止条件
delay_ms(10);
}
void IIC_Read_One_Byte(u8 daddr,u8 addr,u8* data)
{
IIC_Start();
IIC_Send_Byte(daddr); //发送写命令
IIC_Wait_Ack();
IIC_Send_Byte(addr);//发送地址
IIC_Wait_Ack();
IIC_Start();
IIC_Send_Byte(daddr|0X01);//进入接收模式
IIC_Wait_Ack();
*data = IIC_Read_Byte(0);
IIC_Stop();//产生一个停止条件
}
void IIC_Write_One_Byte(u8 daddr,u8 addr,u8 data)
{
IIC_Start();
IIC_Send_Byte(daddr); //发送写命令
IIC_Wait_Ack();
IIC_Send_Byte(addr);//发送地址
IIC_Wait_Ack();
IIC_Send_Byte(data); //发送字节
IIC_Wait_Ack();
IIC_Stop();//产生一个停止条件
delay_ms(10);
}
myiic.h
#ifndef __MAX30102_H
#define __MAX30102_H
#include "sys.h"
//
//IO方向设置
#define SDA_IN() {GPIOB->CRH&=0XFFFFFFF0;GPIOB->CRH|=4;}
#define SDA_OUT() {GPIOB->CRH&=0XFFFFFFF0;GPIOB->CRH|=7;}
//IO操作函数
#define IIC_SCL PBout(7) //SCL
#define IIC_SDA PBout(8) //SDA
#define READ_SDA PBin(8) //输入SDA
//IIC所有操作函数
void IIC_Init(void); //初始化IIC的IO口
void IIC_Start(void); //发送IIC开始信号
void IIC_Stop(void); //发送IIC停止信号
void IIC_Send_Byte(u8 txd); //IIC发送一个字节
u8 IIC_Read_Byte(unsigned char ack);//IIC读取一个字节
u8 IIC_Wait_Ack(void); //IIC等待ACK信号
void IIC_Ack(void); //IIC发送ACK信号
void IIC_NAck(void); //IIC不发送ACK信号
void IIC_Write_One_Byte(u8 daddr,u8 addr,u8 data);
void IIC_Read_One_Byte(u8 daddr,u8 addr,u8* data);
void IIC_WriteBytes(u8 WriteAddr,u8* data,u8 dataLength);
void IIC_ReadBytes(u8 deviceAddr, u8 writeAddr,u8* data,u8 dataLength);
#endifalgorithm.c
/** \file algorithm.c ******************************************************
*
* Project: MAXREFDES117#
* Filename: algorithm.cpp
* Description: This module calculates the heart rate/SpO2 level
*
*
* --------------------------------------------------------------------
*
* This code follows the following naming conventions:
*
* char ch_pmod_value
* char (array) s_pmod_s_string[16]
* float f_pmod_value
* int32_t n_pmod_value
* int32_t (array) an_pmod_value[16]
* int16_t w_pmod_value
* int16_t (array) aw_pmod_value[16]
* uint16_t uw_pmod_value
* uint16_t (array) auw_pmod_value[16]
* uint8_t uch_pmod_value
* uint8_t (array) auch_pmod_buffer[16]
* uint32_t un_pmod_value
* int32_t * pn_pmod_value
*
* ------------------------------------------------------------------------- */
/*******************************************************************************
* Copyright (C) 2016 Maxim Integrated Products, Inc., All Rights Reserved.
*
* Permission is hereby granted, free of charge, to any person obtaining a
* copy of this software and associated documentation files (the "Software"),
* to deal in the Software without restriction, including without limitation
* the rights to use, copy, modify, merge, publish, distribute, sublicense,
* and/or sell copies of the Software, and to permit persons to whom the
* Software is furnished to do so, subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included
* in all copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS
* OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF
* MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT.
* IN NO EVENT SHALL MAXIM INTEGRATED BE LIABLE FOR ANY CLAIM, DAMAGES
* OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE,
* ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR
* OTHER DEALINGS IN THE SOFTWARE.
*
* Except as contained in this notice, the name of Maxim Integrated
* Products, Inc. shall not be used except as stated in the Maxim Integrated
* Products, Inc. Branding Policy.
*
* The mere transfer of this software does not imply any licenses
* of trade secrets, proprietary technology, copyrights, patents,
* trademarks, maskwork rights, or any other form of intellectual
* property whatsoever. Maxim Integrated Products, Inc. retains all
* ownership rights.
*******************************************************************************
*/
#include "algorithm.h"
const uint16_t auw_hamm[31]={ 41, 276, 512, 276, 41 }; //Hamm= long16(512* hamming(5)');
//uch_spo2_table is computed as -45.060*ratioAverage* ratioAverage + 30.354 *ratioAverage + 94.845 ;
const uint8_t uch_spo2_table[184]={ 95, 95, 95, 96, 96, 96, 97, 97, 97, 97, 97, 98, 98, 98, 98, 98, 99, 99, 99, 99,
99, 99, 99, 99, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100,
100, 100, 100, 100, 99, 99, 99, 99, 99, 99, 99, 99, 98, 98, 98, 98, 98, 98, 97, 97,
97, 97, 96, 96, 96, 96, 95, 95, 95, 94, 94, 94, 93, 93, 93, 92, 92, 92, 91, 91,
90, 90, 89, 89, 89, 88, 88, 87, 87, 86, 86, 85, 85, 84, 84, 83, 82, 82, 81, 81,
80, 80, 79, 78, 78, 77, 76, 76, 75, 74, 74, 73, 72, 72, 71, 70, 69, 69, 68, 67,
66, 66, 65, 64, 63, 62, 62, 61, 60, 59, 58, 57, 56, 56, 55, 54, 53, 52, 51, 50,
49, 48, 47, 46, 45, 44, 43, 42, 41, 40, 39, 38, 37, 36, 35, 34, 33, 31, 30, 29,
28, 27, 26, 25, 23, 22, 21, 20, 19, 17, 16, 15, 14, 12, 11, 10, 9, 7, 6, 5,
3, 2, 1 } ;
static int32_t an_dx[ BUFFER_SIZE-MA4_SIZE]; // delta
static int32_t an_x[ BUFFER_SIZE]; //ir
static int32_t an_y[ BUFFER_SIZE]; //red
void maxim_heart_rate_and_oxygen_saturation(uint32_t *pun_ir_buffer, int32_t n_ir_buffer_length, uint32_t *pun_red_buffer, int32_t *pn_spo2, int8_t *pch_spo2_valid,
int32_t *pn_heart_rate, int8_t *pch_hr_valid)
/**
* \brief Calculate the heart rate and SpO2 level
* \par Details
* By detecting peaks of PPG cycle and corresponding AC/DC of red/infra-red signal, the ratio for the SPO2 is computed.
* Since this algorithm is aiming for Arm M0/M3. formaula for SPO2 did not achieve the accuracy due to register overflow.
* Thus, accurate SPO2 is precalculated and save longo uch_spo2_table[] per each ratio.
*
* \param[in] *pun_ir_buffer - IR sensor data buffer
* \param[in] n_ir_buffer_length - IR sensor data buffer length
* \param[in] *pun_red_buffer - Red sensor data buffer
* \param[out] *pn_spo2 - Calculated SpO2 value
* \param[out] *pch_spo2_valid - 1 if the calculated SpO2 value is valid
* \param[out] *pn_heart_rate - Calculated heart rate value
* \param[out] *pch_hr_valid - 1 if the calculated heart rate value is valid
*
* \retval None
*/
{
uint32_t un_ir_mean ,un_only_once ;
int32_t k ,n_i_ratio_count;
int32_t i, s, m, n_exact_ir_valley_locs_count ,n_middle_idx;
int32_t n_th1, n_npks,n_c_min;
int32_t an_ir_valley_locs[15] ;
int32_t an_exact_ir_valley_locs[15] ;
int32_t an_dx_peak_locs[15] ;
int32_t n_peak_interval_sum;
int32_t n_y_ac, n_x_ac;
int32_t n_spo2_calc;
int32_t n_y_dc_max, n_x_dc_max;
int32_t n_y_dc_max_idx, n_x_dc_max_idx;
int32_t an_ratio[5],n_ratio_average;
int32_t n_nume, n_denom ;
// remove DC of ir signal
un_ir_mean =0;
for (k=0 ; k<n_ir_buffer_length ; k++ ) un_ir_mean += pun_ir_buffer[k] ;
un_ir_mean =un_ir_mean/n_ir_buffer_length ;
for (k=0 ; k<n_ir_buffer_length ; k++ ) an_x[k] = pun_ir_buffer[k] - un_ir_mean ;
// 4 pt Moving Average
for(k=0; k< BUFFER_SIZE-MA4_SIZE; k++){
n_denom= ( an_x[k]+an_x[k+1]+ an_x[k+2]+ an_x[k+3]);
an_x[k]= n_denom/(int32_t)4;
}
// get difference of smoothed IR signal
for( k=0; k<BUFFER_SIZE-MA4_SIZE-1; k++)
an_dx[k]= (an_x[k+1]- an_x[k]);
// 2-pt Moving Average to an_dx
for(k=0; k< BUFFER_SIZE-MA4_SIZE-2; k++){
an_dx[k] = ( an_dx[k]+an_dx[k+1])/2 ;
}
// hamming window
// flip wave form so that we can detect valley with peak detector
for ( i=0 ; i<BUFFER_SIZE-HAMMING_SIZE-MA4_SIZE-2 ;i++){
s= 0;
for( k=i; k<i+ HAMMING_SIZE ;k++){
s -= an_dx[k] *auw_hamm[k-i] ;
}
an_dx[i]= s/ (int32_t)1146; // divide by sum of auw_hamm
}
n_th1=0; // threshold calculation
for ( k=0 ; k<BUFFER_SIZE-HAMMING_SIZE ;k++){
n_th1 += ((an_dx[k]>0)? an_dx[k] : ((int32_t)0-an_dx[k])) ;
}
n_th1= n_th1/ ( BUFFER_SIZE-HAMMING_SIZE);
// peak location is acutally index for sharpest location of raw signal since we flipped the signal
maxim_find_peaks( an_dx_peak_locs, &n_npks, an_dx, BUFFER_SIZE-HAMMING_SIZE, n_th1, 8, 5 );//peak_height, peak_distance, max_num_peaks
n_peak_interval_sum =0;
if (n_npks>=2){
for (k=1; k<n_npks; k++)
n_peak_interval_sum += (an_dx_peak_locs[k]-an_dx_peak_locs[k -1]);
n_peak_interval_sum=n_peak_interval_sum/(n_npks-1);
*pn_heart_rate=(int32_t)(6000/n_peak_interval_sum);// beats per minutes
*pch_hr_valid = 1;
}
else {
*pn_heart_rate = -999;
*pch_hr_valid = 0;
}
for ( k=0 ; k<n_npks ;k++)
an_ir_valley_locs[k]=an_dx_peak_locs[k]+HAMMING_SIZE/2;
// raw value : RED(=y) and IR(=X)
// we need to assess DC and AC value of ir and red PPG.
for (k=0 ; k<n_ir_buffer_length ; k++ ) {
an_x[k] = pun_ir_buffer[k] ;
an_y[k] = pun_red_buffer[k] ;
}
// find precise min near an_ir_valley_locs
n_exact_ir_valley_locs_count =0;
for(k=0 ; k<n_npks ;k++){
un_only_once =1;
m=an_ir_valley_locs[k];
n_c_min= 16777216;//2^24;
if (m+5 < BUFFER_SIZE-HAMMING_SIZE && m-5 >0){
for(i= m-5;i<m+5; i++)
if (an_x[i]<n_c_min){
if (un_only_once >0){
un_only_once =0;
}
n_c_min= an_x[i] ;
an_exact_ir_valley_locs[k]=i;
}
if (un_only_once ==0)
n_exact_ir_valley_locs_count ++ ;
}
}
if (n_exact_ir_valley_locs_count <2 ){
*pn_spo2 = -999 ; // do not use SPO2 since signal ratio is out of range
*pch_spo2_valid = 0;
return;
}
// 4 pt MA
for(k=0; k< BUFFER_SIZE-MA4_SIZE; k++){
an_x[k]=( an_x[k]+an_x[k+1]+ an_x[k+2]+ an_x[k+3])/(int32_t)4;
an_y[k]=( an_y[k]+an_y[k+1]+ an_y[k+2]+ an_y[k+3])/(int32_t)4;
}
//using an_exact_ir_valley_locs , find ir-red DC andir-red AC for SPO2 calibration ratio
//finding AC/DC maximum of raw ir * red between two valley locations
n_ratio_average =0;
n_i_ratio_count =0;
for(k=0; k< 5; k++) an_ratio[k]=0;
for (k=0; k< n_exact_ir_valley_locs_count; k++){
if (an_exact_ir_valley_locs[k] > BUFFER_SIZE ){
*pn_spo2 = -999 ; // do not use SPO2 since valley loc is out of range
*pch_spo2_valid = 0;
return;
}
}
// find max between two valley locations
// and use ratio betwen AC compoent of Ir & Red and DC compoent of Ir & Red for SPO2
for (k=0; k< n_exact_ir_valley_locs_count-1; k++){
n_y_dc_max= -16777216 ;
n_x_dc_max= - 16777216;
if (an_exact_ir_valley_locs[k+1]-an_exact_ir_valley_locs[k] >10){
for (i=an_exact_ir_valley_locs[k]; i< an_exact_ir_valley_locs[k+1]; i++){
if (an_x[i]> n_x_dc_max) {n_x_dc_max =an_x[i];n_x_dc_max_idx =i; }
if (an_y[i]> n_y_dc_max) {n_y_dc_max =an_y[i];n_y_dc_max_idx=i;}
}
n_y_ac= (an_y[an_exact_ir_valley_locs[k+1]] - an_y[an_exact_ir_valley_locs[k] ] )*(n_y_dc_max_idx -an_exact_ir_valley_locs[k]); //red
n_y_ac= an_y[an_exact_ir_valley_locs[k]] + n_y_ac/ (an_exact_ir_valley_locs[k+1] - an_exact_ir_valley_locs[k]) ;
n_y_ac= an_y[n_y_dc_max_idx] - n_y_ac; // subracting linear DC compoenents from raw
n_x_ac= (an_x[an_exact_ir_valley_locs[k+1]] - an_x[an_exact_ir_valley_locs[k] ] )*(n_x_dc_max_idx -an_exact_ir_valley_locs[k]); // ir
n_x_ac= an_x[an_exact_ir_valley_locs[k]] + n_x_ac/ (an_exact_ir_valley_locs[k+1] - an_exact_ir_valley_locs[k]);
n_x_ac= an_x[n_y_dc_max_idx] - n_x_ac; // subracting linear DC compoenents from raw
n_nume=( n_y_ac *n_x_dc_max)>>7 ; //prepare X100 to preserve floating value
n_denom= ( n_x_ac *n_y_dc_max)>>7;
if (n_denom>0 && n_i_ratio_count <5 && n_nume != 0)
{
an_ratio[n_i_ratio_count]= (n_nume*20)/n_denom ; //formular is ( n_y_ac *n_x_dc_max) / ( n_x_ac *n_y_dc_max) ; ///*************************n_nume原来是*100************************//
n_i_ratio_count++;
}
}
}
maxim_sort_ascend(an_ratio, n_i_ratio_count);
n_middle_idx= n_i_ratio_count/2;
if (n_middle_idx >1)
n_ratio_average =( an_ratio[n_middle_idx-1] +an_ratio[n_middle_idx])/2; // use median
else
n_ratio_average = an_ratio[n_middle_idx ];
if( n_ratio_average>2 && n_ratio_average <184){
n_spo2_calc= uch_spo2_table[n_ratio_average] ;
*pn_spo2 = n_spo2_calc ;
*pch_spo2_valid = 1;// float_SPO2 = -45.060*n_ratio_average* n_ratio_average/10000 + 30.354 *n_ratio_average/100 + 94.845 ; // for comparison with table
}
else{
*pn_spo2 = -999 ; // do not use SPO2 since signal ratio is out of range
*pch_spo2_valid = 0;
}
}
void maxim_find_peaks(int32_t *pn_locs, int32_t *pn_npks, int32_t *pn_x, int32_t n_size, int32_t n_min_height, int32_t n_min_distance, int32_t n_max_num)
/**
* \brief Find peaks
* \par Details
* Find at most MAX_NUM peaks above MIN_HEIGHT separated by at least MIN_DISTANCE
*
* \retval None
*/
{
maxim_peaks_above_min_height( pn_locs, pn_npks, pn_x, n_size, n_min_height );
maxim_remove_close_peaks( pn_locs, pn_npks, pn_x, n_min_distance );
*pn_npks = min( *pn_npks, n_max_num );
}
void maxim_peaks_above_min_height(int32_t *pn_locs, int32_t *pn_npks, int32_t *pn_x, int32_t n_size, int32_t n_min_height)
/**
* \brief Find peaks above n_min_height
* \par Details
* Find all peaks above MIN_HEIGHT
*
* \retval None
*/
{
int32_t i = 1, n_width;
*pn_npks = 0;
while (i < n_size-1){
if (pn_x[i] > n_min_height && pn_x[i] > pn_x[i-1]){ // find left edge of potential peaks
n_width = 1;
while (i+n_width < n_size && pn_x[i] == pn_x[i+n_width]) // find flat peaks
n_width++;
if (pn_x[i] > pn_x[i+n_width] && (*pn_npks) < 15 ){ // find right edge of peaks
pn_locs[(*pn_npks)++] = i;
// for flat peaks, peak location is left edge
i += n_width+1;
}
else
i += n_width;
}
else
i++;
}
}
void maxim_remove_close_peaks(int32_t *pn_locs, int32_t *pn_npks, int32_t *pn_x, int32_t n_min_distance)
/**
* \brief Remove peaks
* \par Details
* Remove peaks separated by less than MIN_DISTANCE
*
* \retval None
*/
{
int32_t i, j, n_old_npks, n_dist;
/* Order peaks from large to small */
maxim_sort_indices_descend( pn_x, pn_locs, *pn_npks );
for ( i = -1; i < *pn_npks; i++ ){
n_old_npks = *pn_npks;
*pn_npks = i+1;
for ( j = i+1; j < n_old_npks; j++ ){
n_dist = pn_locs[j] - ( i == -1 ? -1 : pn_locs[i] ); // lag-zero peak of autocorr is at index -1
if ( n_dist > n_min_distance || n_dist < -n_min_distance )
pn_locs[(*pn_npks)++] = pn_locs[j];
}
}
// Resort indices longo ascending order
maxim_sort_ascend( pn_locs, *pn_npks );
}
void maxim_sort_ascend(int32_t *pn_x,int32_t n_size)
/**
* \brief Sort array
* \par Details
* Sort array in ascending order (insertion sort algorithm)
*
* \retval None
*/
{
int32_t i, j, n_temp;
for (i = 1; i < n_size; i++) {
n_temp = pn_x[i];
for (j = i; j > 0 && n_temp < pn_x[j-1]; j--)
pn_x[j] = pn_x[j-1];
pn_x[j] = n_temp;
}
}
void maxim_sort_indices_descend(int32_t *pn_x, int32_t *pn_indx, int32_t n_size)
/**
* \brief Sort indices
* \par Details
* Sort indices according to descending order (insertion sort algorithm)
*
* \retval None
*/
{
int32_t i, j, n_temp;
for (i = 1; i < n_size; i++) {
n_temp = pn_indx[i];
for (j = i; j > 0 && pn_x[n_temp] > pn_x[pn_indx[j-1]]; j--)
pn_indx[j] = pn_indx[j-1];
pn_indx[j] = n_temp;
}
}
algorithm.h
/** \file algorithm.h ******************************************************
*
* Project: MAXREFDES117#
* Filename: algorithm.h
* Description: This module is the heart rate/SpO2 calculation algorithm header file
*
* Revision History:
*\n 1-18-2016 Rev 01.00 SK Initial release.
*\n
*
* --------------------------------------------------------------------
*
* This code follows the following naming conventions:
*
*\n char ch_pmod_value
*\n char (array) s_pmod_s_string[16]
*\n float f_pmod_value
*\n int32_t n_pmod_value
*\n int32_t (array) an_pmod_value[16]
*\n int16_t w_pmod_value
*\n int16_t (array) aw_pmod_value[16]
*\n uint16_t uw_pmod_value
*\n uint16_t (array) auw_pmod_value[16]
*\n uint8_t uch_pmod_value
*\n uint8_t (array) auch_pmod_buffer[16]
*\n uint32_t un_pmod_value
*\n int32_t * pn_pmod_value
*
* ------------------------------------------------------------------------- */
/*******************************************************************************
* Copyright (C) 2015 Maxim Integrated Products, Inc., All Rights Reserved.
*
* Permission is hereby granted, free of charge, to any person obtaining a
* copy of this software and associated documentation files (the "Software"),
* to deal in the Software without restriction, including without limitation
* the rights to use, copy, modify, merge, publish, distribute, sublicense,
* and/or sell copies of the Software, and to permit persons to whom the
* Software is furnished to do so, subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included
* in all copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS
* OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF
* MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT.
* IN NO EVENT SHALL MAXIM INTEGRATED BE LIABLE FOR ANY CLAIM, DAMAGES
* OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE,
* ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR
* OTHER DEALINGS IN THE SOFTWARE.
*
* Except as contained in this notice, the name of Maxim Integrated
* Products, Inc. shall not be used except as stated in the Maxim Integrated
* Products, Inc. Branding Policy.
*
* The mere transfer of this software does not imply any licenses
* of trade secrets, proprietary technology, copyrights, patents,
* trademarks, maskwork rights, or any other form of intellectual
* property whatsoever. Maxim Integrated Products, Inc. retains all
* ownership rights.
*******************************************************************************
*/
#ifndef ALGORITHM_H_
#define ALGORITHM_H_
#include "sys.h"
#define true 1
#define false 0
#define FS 100
#define BUFFER_SIZE (FS* 5)
#define HR_FIFO_SIZE 7
#define MA4_SIZE 4 // DO NOT CHANGE
#define HAMMING_SIZE 5// DO NOT CHANGE
#define min(x,y) ((x) < (y) ? (x) : (y))
//const uint16_t auw_hamm[31]={ 41, 276, 512, 276, 41 }; //Hamm= long16(512* hamming(5)');
uch_spo2_table is computed as -45.060*ratioAverage* ratioAverage + 30.354 *ratioAverage + 94.845 ;
//const uint8_t uch_spo2_table[184]={ 95, 95, 95, 96, 96, 96, 97, 97, 97, 97, 97, 98, 98, 98, 98, 98, 99, 99, 99, 99,
// 99, 99, 99, 99, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100,
// 100, 100, 100, 100, 99, 99, 99, 99, 99, 99, 99, 99, 98, 98, 98, 98, 98, 98, 97, 97,
// 97, 97, 96, 96, 96, 96, 95, 95, 95, 94, 94, 94, 93, 93, 93, 92, 92, 92, 91, 91,
// 90, 90, 89, 89, 89, 88, 88, 87, 87, 86, 86, 85, 85, 84, 84, 83, 82, 82, 81, 81,
// 80, 80, 79, 78, 78, 77, 76, 76, 75, 74, 74, 73, 72, 72, 71, 70, 69, 69, 68, 67,
// 66, 66, 65, 64, 63, 62, 62, 61, 60, 59, 58, 57, 56, 56, 55, 54, 53, 52, 51, 50,
// 49, 48, 47, 46, 45, 44, 43, 42, 41, 40, 39, 38, 37, 36, 35, 34, 33, 31, 30, 29,
// 28, 27, 26, 25, 23, 22, 21, 20, 19, 17, 16, 15, 14, 12, 11, 10, 9, 7, 6, 5,
// 3, 2, 1 } ;
//static int32_t an_dx[ BUFFER_SIZE-MA4_SIZE]; // delta
//static int32_t an_x[ BUFFER_SIZE]; //ir
//static int32_t an_y[ BUFFER_SIZE]; //red
void maxim_heart_rate_and_oxygen_saturation(uint32_t *pun_ir_buffer , int32_t n_ir_buffer_length, uint32_t *pun_red_buffer , int32_t *pn_spo2, int8_t *pch_spo2_valid , int32_t *pn_heart_rate , int8_t *pch_hr_valid);
void maxim_find_peaks( int32_t *pn_locs, int32_t *pn_npks, int32_t *pn_x, int32_t n_size, int32_t n_min_height, int32_t n_min_distance, int32_t n_max_num );
void maxim_peaks_above_min_height( int32_t *pn_locs, int32_t *pn_npks, int32_t *pn_x, int32_t n_size, int32_t n_min_height );
void maxim_remove_close_peaks( int32_t *pn_locs, int32_t *pn_npks, int32_t *pn_x, int32_t n_min_distance );
void maxim_sort_ascend( int32_t *pn_x, int32_t n_size );
void maxim_sort_indices_descend( int32_t *pn_x, int32_t *pn_indx, int32_t n_size);
#endif /* ALGORITHM_H_ */
五 、参考
STM32+ MAX30102通过指尖测量心率+血氧饱和度https://blog.csdn.net/qq_37603131/article/details/127943666?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522170202716916800225583292%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=170202716916800225583292&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~top_positive~default-2-127943666-null-null.142%5Ev96%5Epc_search_result_base7&utm_term=MAX30102&spm=1018.2226.3001.4187文章来源地址https://www.toymoban.com/news/detail-813350.html
到了这里,关于STM32传感器外设集--心率模块(MAX30102)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!