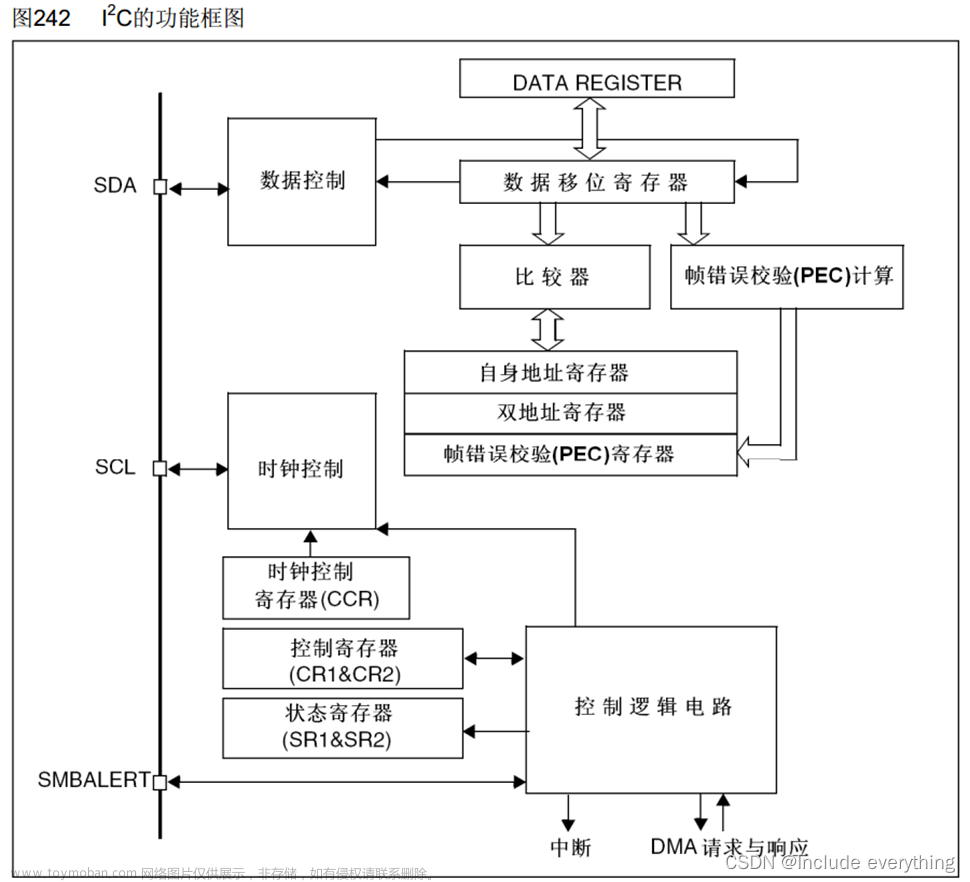
stm32中I2C
I2C 协议简介
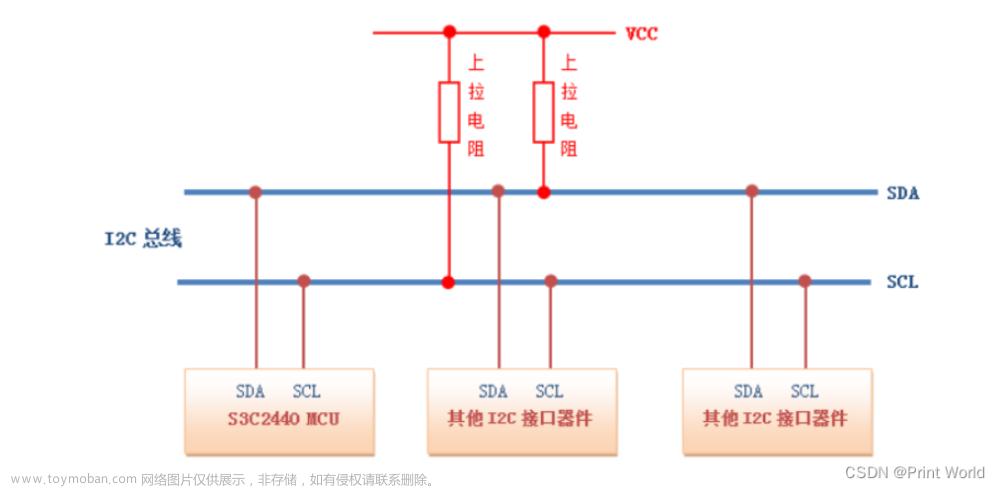
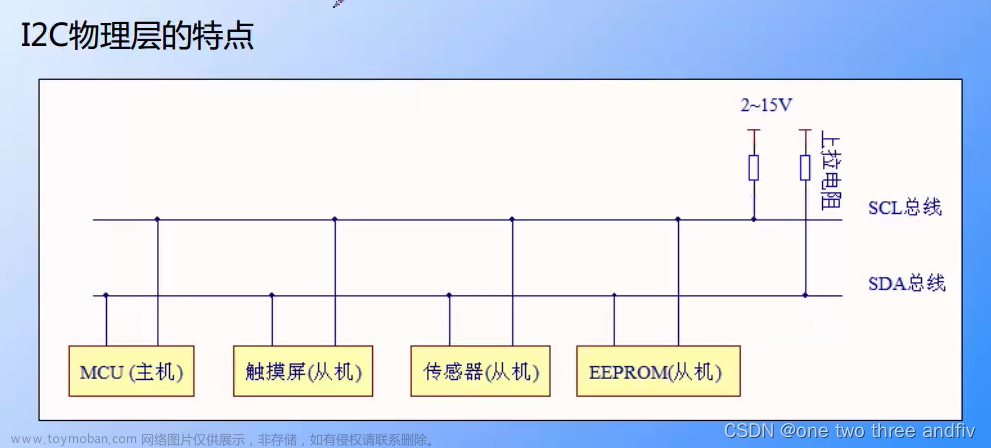
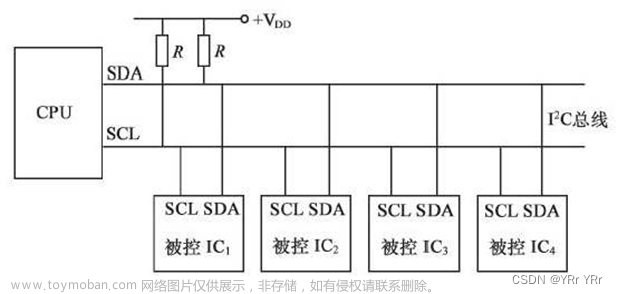
I2C物理层
协议通讯图
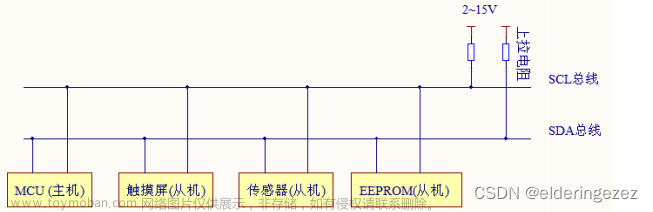
- I2C上一个总线能挂载多个设备共用信号线,可以连接多个从机
- 只用了两个总线,一条双向串行数据线(SDA),一条串行时钟线(SCL)。数据线即用来表示数据,时钟线用于数据收发同步。
- 每个连接到总线的设备都有独立的地址,主机可以通过该地址进行访问
- I2C空闲时输出高阻态,当所有设备都空闲时,由上拉电阻把总线拉成高电平
- 主机同时使用总线时,会用仲裁的方式来决定
- 三种传输模式:标准模式传输速率为 100kbit/s ,快速模式为 400kbit/s ,高速模式下可达3.4Mbit/s,但目前大多 I 2C 设备尚不支持高速模式。
- 连接到相同总线的IC数量收到总线的最大电容400pF限制。
协议层
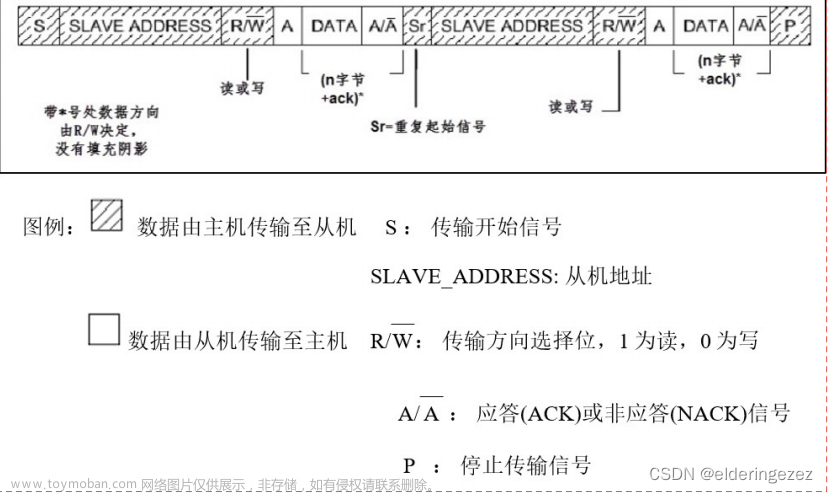
I2C 的协议定义了通讯的起始和停止信号、数据有效性、响应、仲裁、时钟同步和地址广播等环节。
I2C基本读写过程
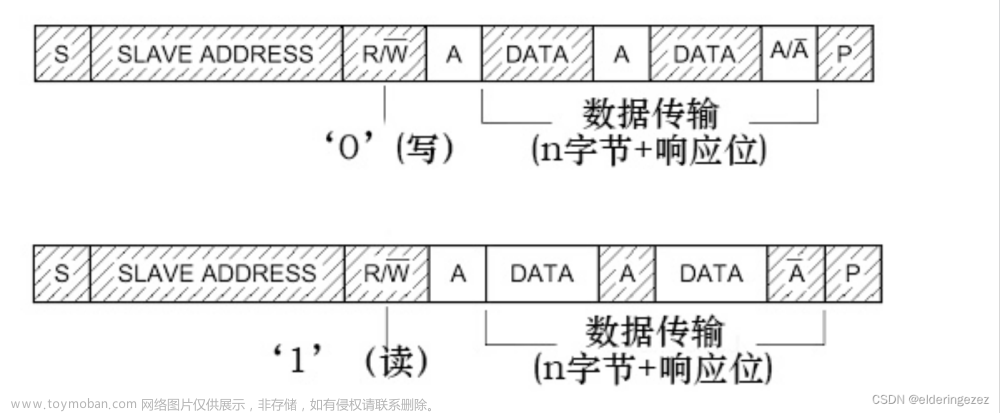
先看看 I2C 通讯过程的基本结构,它的通讯过程见图主机写数据到从机 、图主机由从机中读数据 及图 I2C 通讯复合格式 。
注意:
- 从机地址:7位或者10位
- 应答信号:只有接收到应答信号后主句才会继续发送或者接收数据
写数据:(将数据写入地址)
- 从机向主机写完地址并且接收到应答信号
- 正式向从机传输数据(DATA),数据包的大小为8位,主机没发送完一个字节数据,都要等待从机的应答信号(ACK),重复这个过程,可以传输N个数据,N大小没有限制。数据结束时向从机发送一个停止传输信号(P),表示不再传输数据。
读数据:(将数据从地址读出)
- 从机向主机写完设备地址并且收到应答信号
- 从机开始向主机返回数据 (DATA),数据包大小也为 8 位,从机每发送完一个数据,都会等待主机的应答信号 (ACK),重复这个过程,可以返回 N 个数据,这个 N 也没有大小限制。当主机希望停止接收数据时,就向从机返回一个非应答信号 (NACK),则从机自动停止数据传输。
读和写数据:(从主机找到设备后再读)
- 除了基本的读写,I2C 通讯更常用的是复合格式,即第三幅图的情况,该传输过程有两次起始信号 (S)。
- 一般在第一次传输中,主机通过 SLAVE_ADDRESS 寻找到从设备后,发送一段“数据”,这段数据通常用于表示从设备内部的寄存器或存储器地址 (注意区分它与 SLAVE_ADDRESS 的区别);
- 在第二次的传输中,对该地址的内容进行读或写。也就是说,第一次通讯是告诉从机读写地址,第二次则是读写的实际内容
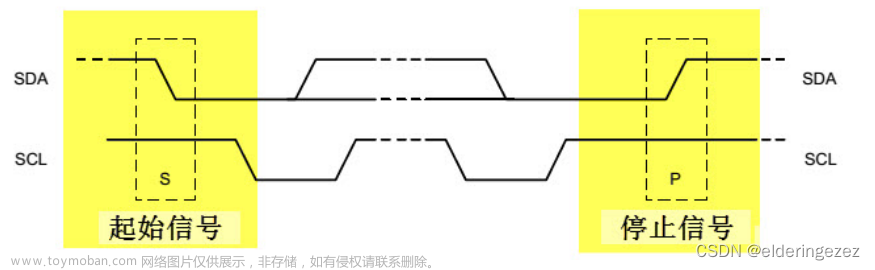
通讯的起始和停止信号
数据有效性

地址及数据方向
七位地址
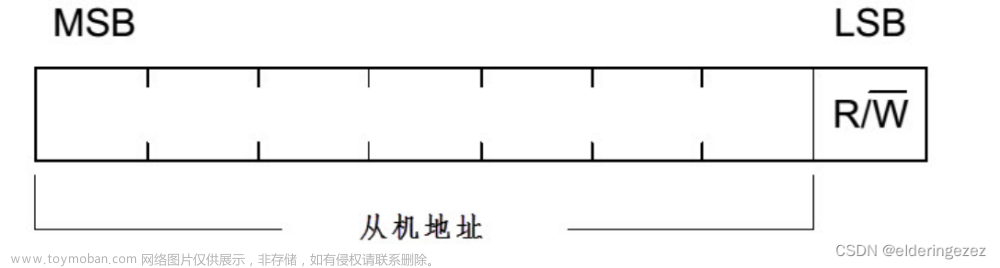
- I2C协议规定地址可以是七位或者十位,但是通常使用七位。
- 前七位或者前十位是从机地址,第八位或者第十一位是读写标志符
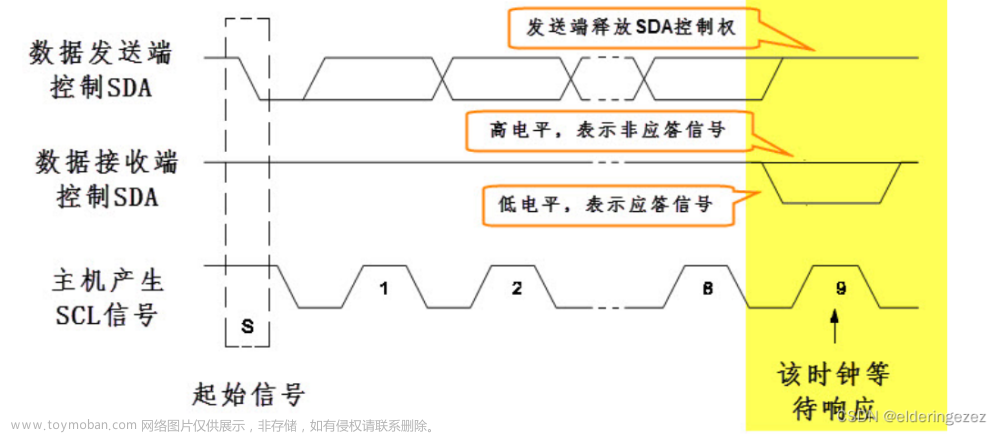
响应
STM32的I2C特性及架构
- 硬件协议(stm32的有点问题,很容易卡死)
- 软件协议(推荐使用)
STM32的 I2C外设简介
STM32 的 I 2C 架构剖析

通讯引脚
| 引脚 | I2C1 | I2C2 |
|---|---|---|
| SCL | PB6/PB8(重映射) | PB10 |
| SDA | PB7/PB9(重映射) | PB111 |
通讯过程
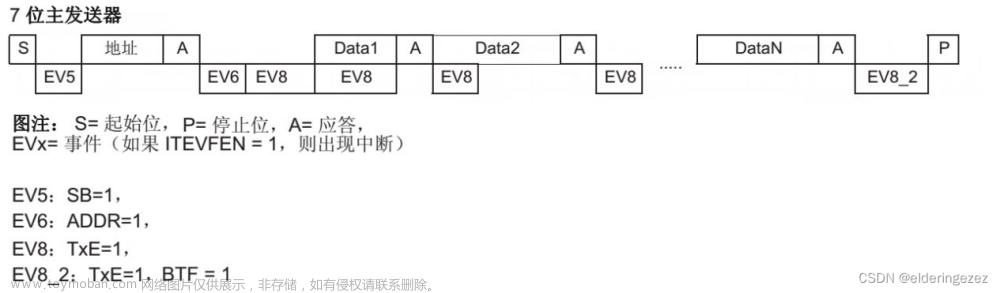
主发送器
 文章来源:https://www.toymoban.com/news/detail-814069.html
文章来源:https://www.toymoban.com/news/detail-814069.html
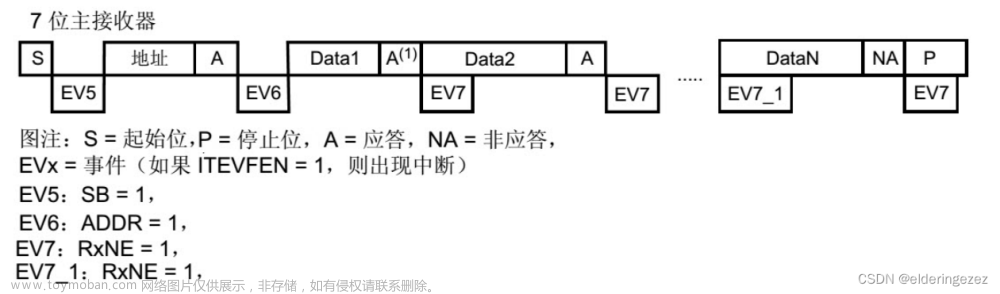
主接收器
 文章来源地址https://www.toymoban.com/news/detail-814069.html
文章来源地址https://www.toymoban.com/news/detail-814069.html
I2C初始化结构体
typedef struct
{
uint32_t I2C_ClockSpeed; /*!< Specifies the clock frequency.
This parameter must be set to a value lower than 400kHz */
uint16_t I2C_Mode; /*!< Specifies the I2C mode.
This parameter can be a value of @ref I2C_mode */
uint16_t I2C_DutyCycle; /*!< Specifies the I2C fast mode duty cycle.
This parameter can be a value of @ref I2C_duty_cycle_in_fast_mode */
uint16_t I2C_OwnAddress1; /*!< Specifies the first device own address.
This parameter can be a 7-bit or 10-bit address. */
uint16_t I2C_Ack; /*!< Enables or disables the acknowledgement.
This parameter can be a value of @ref I2C_acknowledgement */
uint16_t I2C_AcknowledgedAddress; /*!< Specifies if 7-bit or 10-bit address is acknowledged.
This parameter can be a value of @ref I2C_acknowledged_address */
}I2C_InitTypeDef;
| 结构体名称 | 作用 |
|---|---|
| I2C_ClockSpeed | 控制速度 |
| I2C_Mode | 控制模式 |
| I2C_DutyCycle | 控制占空比 |
| I2C_OwnAddress1 | 控制自己的地址 |
| I2C_Ack | 控制应答 |
| I2C_AcknowledgedAddress | 控制设备地址 |
代码实现
硬件代码
/**
******************************************************************************
* @file bsp_i2c_ee.c
* @author STMicroelectronics
* @version V1.0
* @date 2013-xx-xx
* @brief i2c EEPROM(AT24C02)应用函数bsp
******************************************************************************
* @attention
*
* 实验平台:野火 F103-指南者 STM32 开发板
*
******************************************************************************
*/
#include "./i2c/bsp_i2c_ee.h"
#include "./usart/bsp_usart.h"
uint16_t EEPROM_ADDRESS;
static __IO uint32_t I2CTimeout = I2CT_LONG_TIMEOUT;
static uint32_t I2C_TIMEOUT_UserCallback(uint8_t errorCode);
/**
* @brief I2C I/O配置
* @param 无
* @retval 无
*/
static void I2C_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* 使能与 I2C 有关的时钟 */
EEPROM_I2C_APBxClock_FUN ( EEPROM_I2C_CLK, ENABLE );
EEPROM_I2C_GPIO_APBxClock_FUN ( EEPROM_I2C_GPIO_CLK, ENABLE );
/* I2C_SCL、I2C_SDA*/
GPIO_InitStructure.GPIO_Pin = EEPROM_I2C_SCL_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD; // 开漏输出
GPIO_Init(EEPROM_I2C_SCL_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = EEPROM_I2C_SDA_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD; // 开漏输出
GPIO_Init(EEPROM_I2C_SDA_PORT, &GPIO_InitStructure);
}
/**
* @brief I2C 工作模式配置
* @param 无
* @retval 无
*/
static void I2C_Mode_Configu(void)
{
I2C_InitTypeDef I2C_InitStructure;
/* I2C 配置 */
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
/* 高电平数据稳定,低电平数据变化 SCL 时钟线的占空比 */
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStructure.I2C_OwnAddress1 =I2Cx_OWN_ADDRESS7;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable ;
/* I2C的寻址模式 */
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
/* 通信速率 */
I2C_InitStructure.I2C_ClockSpeed = I2C_Speed;
/* I2C 初始化 */
I2C_Init(EEPROM_I2Cx, &I2C_InitStructure);
/* 使能 I2C */
I2C_Cmd(EEPROM_I2Cx, ENABLE);
}
/**
* @brief I2C 外设(EEPROM)初始化
* @param 无
* @retval 无
*/
void I2C_EE_Init(void)
{
I2C_GPIO_Config();
I2C_Mode_Configu();
/* 根据头文件i2c_ee.h中的定义来选择EEPROM的设备地址 */
#ifdef EEPROM_Block0_ADDRESS
/* 选择 EEPROM Block0 来写入 */
EEPROM_ADDRESS = EEPROM_Block0_ADDRESS;
#endif
#ifdef EEPROM_Block1_ADDRESS
/* 选择 EEPROM Block1 来写入 */
EEPROM_ADDRESS = EEPROM_Block1_ADDRESS;
#endif
#ifdef EEPROM_Block2_ADDRESS
/* 选择 EEPROM Block2 来写入 */
EEPROM_ADDRESS = EEPROM_Block2_ADDRESS;
#endif
#ifdef EEPROM_Block3_ADDRESS
/* 选择 EEPROM Block3 来写入 */
EEPROM_ADDRESS = EEPROM_Block3_ADDRESS;
#endif
}
/**
* @brief 将缓冲区中的数据写到I2C EEPROM中
* @param
* @arg pBuffer:缓冲区指针
* @arg WriteAddr:写地址
* @arg NumByteToWrite:写的字节数
* @retval 无
*/
void I2C_EE_BufferWrite(u8* pBuffer, u8 WriteAddr, u16 NumByteToWrite)
{
u8 NumOfPage = 0, NumOfSingle = 0, Addr = 0, count = 0;
Addr = WriteAddr % I2C_PageSize;
count = I2C_PageSize - Addr;
NumOfPage = NumByteToWrite / I2C_PageSize;
NumOfSingle = NumByteToWrite % I2C_PageSize;
/* If WriteAddr is I2C_PageSize aligned */
if(Addr == 0)
{
/* If NumByteToWrite < I2C_PageSize */
if(NumOfPage == 0)
{
I2C_EE_PageWrite(pBuffer, WriteAddr, NumOfSingle);
I2C_EE_WaitEepromStandbyState();
}
/* If NumByteToWrite > I2C_PageSize */
else
{
while(NumOfPage--)
{
I2C_EE_PageWrite(pBuffer, WriteAddr, I2C_PageSize);
I2C_EE_WaitEepromStandbyState();
WriteAddr += I2C_PageSize;
pBuffer += I2C_PageSize;
}
if(NumOfSingle!=0)
{
I2C_EE_PageWrite(pBuffer, WriteAddr, NumOfSingle);
I2C_EE_WaitEepromStandbyState();
}
}
}
/* If WriteAddr is not I2C_PageSize aligned */
else
{
/* If NumByteToWrite < I2C_PageSize */
if(NumOfPage== 0)
{
I2C_EE_PageWrite(pBuffer, WriteAddr, NumOfSingle);
I2C_EE_WaitEepromStandbyState();
}
/* If NumByteToWrite > I2C_PageSize */
else
{
NumByteToWrite -= count;
NumOfPage = NumByteToWrite / I2C_PageSize;
NumOfSingle = NumByteToWrite % I2C_PageSize;
if(count != 0)
{
I2C_EE_PageWrite(pBuffer, WriteAddr, count);
I2C_EE_WaitEepromStandbyState();
WriteAddr += count;
pBuffer += count;
}
while(NumOfPage--)
{
I2C_EE_PageWrite(pBuffer, WriteAddr, I2C_PageSize);
I2C_EE_WaitEepromStandbyState();
WriteAddr += I2C_PageSize;
pBuffer += I2C_PageSize;
}
if(NumOfSingle != 0)
{
I2C_EE_PageWrite(pBuffer, WriteAddr, NumOfSingle);
I2C_EE_WaitEepromStandbyState();
}
}
}
}
/**
* @brief 写一个字节到I2C EEPROM中
* @param
* @arg pBuffer:缓冲区指针
* @arg WriteAddr:写地址
* @retval 无
*/
uint32_t I2C_EE_ByteWrite(u8* pBuffer, u8 WriteAddr)
{
/* Send STRAT condition */
I2C_GenerateSTART(EEPROM_I2Cx, ENABLE);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV5 and clear it */
while(!I2C_CheckEvent(EEPROM_I2Cx, I2C_EVENT_MASTER_MODE_SELECT))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(0);
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Send EEPROM address for write */
I2C_Send7bitAddress(EEPROM_I2Cx, EEPROM_ADDRESS, I2C_Direction_Transmitter);
/* Test on EV6 and clear it */
while(!I2C_CheckEvent(EEPROM_I2Cx, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(1);
}
/* Send the EEPROM's internal address to write to */
I2C_SendData(EEPROM_I2Cx, WriteAddr);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV8 and clear it */
while(!I2C_CheckEvent(EEPROM_I2Cx, I2C_EVENT_MASTER_BYTE_TRANSMITTED))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(2);
}
/* Send the byte to be written */
I2C_SendData(EEPROM_I2Cx, *pBuffer);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV8 and clear it */
while(!I2C_CheckEvent(EEPROM_I2Cx, I2C_EVENT_MASTER_BYTE_TRANSMITTED))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(3);
}
/* Send STOP condition */
I2C_GenerateSTOP(EEPROM_I2Cx, ENABLE);
return 1;
}
/**
* @brief 在EEPROM的一个写循环中可以写多个字节,但一次写入的字节数
* 不能超过EEPROM页的大小,AT24C02每页有8个字节
* @param
* @arg pBuffer:缓冲区指针
* @arg WriteAddr:写地址
* @arg NumByteToWrite:写的字节数
* @retval 无
*/
uint32_t I2C_EE_PageWrite(u8* pBuffer, u8 WriteAddr, u8 NumByteToWrite)
{
I2CTimeout = I2CT_LONG_TIMEOUT;
while(I2C_GetFlagStatus(EEPROM_I2Cx, I2C_FLAG_BUSY))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(4);
}
/* Send START condition */
I2C_GenerateSTART(EEPROM_I2Cx, ENABLE);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV5 and clear it */
while(!I2C_CheckEvent(EEPROM_I2Cx, I2C_EVENT_MASTER_MODE_SELECT))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(5);
}
/* Send EEPROM address for write */
I2C_Send7bitAddress(EEPROM_I2Cx, EEPROM_ADDRESS, I2C_Direction_Transmitter);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV6 and clear it */
while(!I2C_CheckEvent(EEPROM_I2Cx, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(6);
}
/* Send the EEPROM's internal address to write to */
I2C_SendData(EEPROM_I2Cx, WriteAddr);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV8 and clear it */
while(! I2C_CheckEvent(EEPROM_I2Cx, I2C_EVENT_MASTER_BYTE_TRANSMITTED))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(7);
}
/* While there is data to be written */
while(NumByteToWrite--)
{
/* Send the current byte */
I2C_SendData(EEPROM_I2Cx, *pBuffer);
/* Point to the next byte to be written */
pBuffer++;
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV8 and clear it */
while (!I2C_CheckEvent(EEPROM_I2Cx, I2C_EVENT_MASTER_BYTE_TRANSMITTED))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(8);
}
}
/* Send STOP condition */
I2C_GenerateSTOP(EEPROM_I2Cx, ENABLE);
return 1;
}
/**
* @brief 从EEPROM里面读取一块数据
* @param
* @arg pBuffer:存放从EEPROM读取的数据的缓冲区指针
* @arg WriteAddr:接收数据的EEPROM的地址
* @arg NumByteToWrite:要从EEPROM读取的字节数
* @retval 无
*/
uint32_t I2C_EE_BufferRead(u8* pBuffer, u8 ReadAddr, u16 NumByteToRead)
{
I2CTimeout = I2CT_LONG_TIMEOUT;
//*((u8 *)0x4001080c) |=0x80;
while(I2C_GetFlagStatus(EEPROM_I2Cx, I2C_FLAG_BUSY))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(9);
}
/* Send START condition */
I2C_GenerateSTART(EEPROM_I2Cx, ENABLE);
//*((u8 *)0x4001080c) &=~0x80;
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV5 and clear it */
while(!I2C_CheckEvent(EEPROM_I2Cx, I2C_EVENT_MASTER_MODE_SELECT))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(10);
}
/* Send EEPROM address for write */
I2C_Send7bitAddress(EEPROM_I2Cx, EEPROM_ADDRESS, I2C_Direction_Transmitter);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV6 and clear it */
while(!I2C_CheckEvent(EEPROM_I2Cx, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(11);
}
/* Clear EV6 by setting again the PE bit */
I2C_Cmd(EEPROM_I2Cx, ENABLE);
/* Send the EEPROM's internal address to write to */
I2C_SendData(EEPROM_I2Cx, ReadAddr);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV8 and clear it */
while(!I2C_CheckEvent(EEPROM_I2Cx, I2C_EVENT_MASTER_BYTE_TRANSMITTED))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(12);
}
/* Send STRAT condition a second time */
I2C_GenerateSTART(EEPROM_I2Cx, ENABLE);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV5 and clear it */
while(!I2C_CheckEvent(EEPROM_I2Cx, I2C_EVENT_MASTER_MODE_SELECT))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(13);
}
/* Send EEPROM address for read */
I2C_Send7bitAddress(EEPROM_I2Cx, EEPROM_ADDRESS, I2C_Direction_Receiver);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV6 and clear it */
while(!I2C_CheckEvent(EEPROM_I2Cx, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(14);
}
/* While there is data to be read */
while(NumByteToRead)
{
if(NumByteToRead == 1)
{
/* Disable Acknowledgement */
I2C_AcknowledgeConfig(EEPROM_I2Cx, DISABLE);
/* Send STOP Condition */
I2C_GenerateSTOP(EEPROM_I2Cx, ENABLE);
}
/* Test on EV7 and clear it */
I2CTimeout = I2CT_LONG_TIMEOUT;
while(I2C_CheckEvent(EEPROM_I2Cx, I2C_EVENT_MASTER_BYTE_RECEIVED)==0)
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(3);
}
{
/* Read a byte from the EEPROM */
*pBuffer = I2C_ReceiveData(EEPROM_I2Cx);
/* Point to the next location where the byte read will be saved */
pBuffer++;
/* Decrement the read bytes counter */
NumByteToRead--;
}
}
/* Enable Acknowledgement to be ready for another reception */
I2C_AcknowledgeConfig(EEPROM_I2Cx, ENABLE);
return 1;
}
/**
* @brief Wait for EEPROM Standby state
* @param 无
* @retval 无
*/
void I2C_EE_WaitEepromStandbyState(void)
{
vu16 SR1_Tmp = 0;
do
{
/* Send START condition */
I2C_GenerateSTART(EEPROM_I2Cx, ENABLE);
/* Read I2C1 SR1 register */
SR1_Tmp = I2C_ReadRegister(EEPROM_I2Cx, I2C_Register_SR1);
/* Send EEPROM address for write */
I2C_Send7bitAddress(EEPROM_I2Cx, EEPROM_ADDRESS, I2C_Direction_Transmitter);
}while(!(I2C_ReadRegister(EEPROM_I2Cx, I2C_Register_SR1) & 0x0002));
/* Clear AF flag */
I2C_ClearFlag(EEPROM_I2Cx, I2C_FLAG_AF);
/* STOP condition */
I2C_GenerateSTOP(EEPROM_I2Cx, ENABLE);
}
/**
* @brief Basic management of the timeout situation.
* @param errorCode:错误代码,可以用来定位是哪个环节出错.
* @retval 返回0,表示IIC读取失败.
*/
static uint32_t I2C_TIMEOUT_UserCallback(uint8_t errorCode)
{
/* Block communication and all processes */
EEPROM_ERROR("I2C 等待超时!errorCode = %d",errorCode);
return 0;
}
/*********************************************END OF FILE**********************/
软件代码
/**
******************************************************************************
* @file bsp_i2c_ee.c
* @version V1.0
* @date 2013-xx-xx
* @brief i2c EEPROM(AT24C02)应用函数bsp
******************************************************************************
* @attention
*
* 实验平台:野火 F103-指南者 STM32 开发板
*
******************************************************************************
*/
#include "bsp_i2c_ee.h"
#include "bsp_i2c_gpio.h"
#include "bsp_usart.h"
/*
*********************************************************************************************************
* 函 数 名: ee_CheckOk
* 功能说明: 判断串行EERPOM是否正常
* 形 参:无
* 返 回 值: 1 表示正常, 0 表示不正常
*********************************************************************************************************
*/
uint8_t ee_CheckOk(void)
{
if (i2c_CheckDevice(EEPROM_DEV_ADDR) == 0)
{
return 1;
}
else
{
/* 失败后,切记发送I2C总线停止信号 */
i2c_Stop();
return 0;
}
}
/*
*********************************************************************************************************
* 函 数 名: ee_ReadBytes
* 功能说明: 从串行EEPROM指定地址处开始读取若干数据
* 形 参:_usAddress : 起始地址
* _usSize : 数据长度,单位为字节
* _pReadBuf : 存放读到的数据的缓冲区指针
* 返 回 值: 0 表示失败,1表示成功
*********************************************************************************************************
*/
uint8_t ee_ReadBytes(uint8_t *_pReadBuf, uint16_t _usAddress, uint16_t _usSize)
{
uint16_t i;
/* 采用串行EEPROM随即读取指令序列,连续读取若干字节 */
/* 第1步:发起I2C总线启动信号 */
i2c_Start();
/* 第2步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
i2c_SendByte(EEPROM_DEV_ADDR | EEPROM_I2C_WR); /* 此处是写指令 */
/* 第3步:等待ACK */
if (i2c_WaitAck() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第4步:发送字节地址,24C02只有256字节,因此1个字节就够了,如果是24C04以上,那么此处需要连发多个地址 */
i2c_SendByte((uint8_t)_usAddress);
/* 第5步:等待ACK */
if (i2c_WaitAck() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第6步:重新启动I2C总线。前面的代码的目的向EEPROM传送地址,下面开始读取数据 */
i2c_Start();
/* 第7步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
i2c_SendByte(EEPROM_DEV_ADDR | EEPROM_I2C_RD); /* 此处是读指令 */
/* 第8步:发送ACK */
if (i2c_WaitAck() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第9步:循环读取数据 */
for (i = 0; i < _usSize; i++)
{
_pReadBuf[i] = i2c_ReadByte(); /* 读1个字节 */
/* 每读完1个字节后,需要发送Ack, 最后一个字节不需要Ack,发Nack */
if (i != _usSize - 1)
{
i2c_Ack(); /* 中间字节读完后,CPU产生ACK信号(驱动SDA = 0) */
}
else
{
i2c_NAck(); /* 最后1个字节读完后,CPU产生NACK信号(驱动SDA = 1) */
}
}
/* 发送I2C总线停止信号 */
i2c_Stop();
return 1; /* 执行成功 */
cmd_fail: /* 命令执行失败后,切记发送停止信号,避免影响I2C总线上其他设备 */
/* 发送I2C总线停止信号 */
i2c_Stop();
return 0;
}
/*
*********************************************************************************************************
* 函 数 名: ee_WriteBytes
* 功能说明: 向串行EEPROM指定地址写入若干数据,采用页写操作提高写入效率
* 形 参:_usAddress : 起始地址
* _usSize : 数据长度,单位为字节
* _pWriteBuf : 存放读到的数据的缓冲区指针
* 返 回 值: 0 表示失败,1表示成功
*********************************************************************************************************
*/
uint8_t ee_WriteBytes(uint8_t *_pWriteBuf, uint16_t _usAddress, uint16_t _usSize)
{
uint16_t i,m;
uint16_t usAddr;
/*
写串行EEPROM不像读操作可以连续读取很多字节,每次写操作只能在同一个page。
对于24xx02,page size = 8
简单的处理方法为:按字节写操作模式,每写1个字节,都发送地址
为了提高连续写的效率: 本函数采用page wirte操作。
*/
usAddr = _usAddress;
for (i = 0; i < _usSize; i++)
{
/* 当发送第1个字节或是页面首地址时,需要重新发起启动信号和地址 */
if ((i == 0) || (usAddr & (EEPROM_PAGE_SIZE - 1)) == 0)
{
/* 第0步:发停止信号,启动内部写操作 */
i2c_Stop();
/* 通过检查器件应答的方式,判断内部写操作是否完成, 一般小于 10ms
CLK频率为200KHz时,查询次数为30次左右
*/
for (m = 0; m < 1000; m++)
{
/* 第1步:发起I2C总线启动信号 */
i2c_Start();
/* 第2步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
i2c_SendByte(EEPROM_DEV_ADDR | EEPROM_I2C_WR); /* 此处是写指令 */
/* 第3步:发送一个时钟,判断器件是否正确应答 */
if (i2c_WaitAck() == 0)
{
break;
}
}
if (m == 1000)
{
goto cmd_fail; /* EEPROM器件写超时 */
}
/* 第4步:发送字节地址,24C02只有256字节,因此1个字节就够了,如果是24C04以上,那么此处需要连发多个地址 */
i2c_SendByte((uint8_t)usAddr);
/* 第5步:等待ACK */
if (i2c_WaitAck() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
}
/* 第6步:开始写入数据 */
i2c_SendByte(_pWriteBuf[i]);
/* 第7步:发送ACK */
if (i2c_WaitAck() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
usAddr++; /* 地址增1 */
}
/* 命令执行成功,发送I2C总线停止信号 */
i2c_Stop();
return 1;
cmd_fail: /* 命令执行失败后,切记发送停止信号,避免影响I2C总线上其他设备 */
/* 发送I2C总线停止信号 */
i2c_Stop();
return 0;
}
void ee_Erase(void)
{
uint16_t i;
uint8_t buf[EEPROM_SIZE];
/* 填充缓冲区 */
for (i = 0; i < EEPROM_SIZE; i++)
{
buf[i] = 0xFF;
}
/* 写EEPROM, 起始地址 = 0,数据长度为 256 */
if (ee_WriteBytes(buf, 0, EEPROM_SIZE) == 0)
{
printf("擦除eeprom出错!\r\n");
return;
}
else
{
printf("擦除eeprom成功!\r\n");
}
}
/*--------------------------------------------------------------------------------------------------*/
static void ee_Delay(__IO uint32_t nCount) //简单的延时函数
{
for(; nCount != 0; nCount--);
}
/*
* eeprom AT24C02 读写测试
* 正常返回1,异常返回0
*/
uint8_t ee_Test(void)
{
uint16_t i;
uint8_t write_buf[EEPROM_SIZE];
uint8_t read_buf[EEPROM_SIZE];
/*-----------------------------------------------------------------------------------*/
if (ee_CheckOk() == 0)
{
/* 没有检测到EEPROM */
printf("没有检测到串行EEPROM!\r\n");
return 0;
}
/*------------------------------------------------------------------------------------*/
/* 填充测试缓冲区 */
for (i = 0; i < EEPROM_SIZE; i++)
{
write_buf[i] = i;
}
/*------------------------------------------------------------------------------------*/
if (ee_WriteBytes(write_buf, 0, EEPROM_SIZE) == 0)
{
printf("写eeprom出错!\r\n");
return 0;
}
else
{
printf("写eeprom成功!\r\n");
}
/*写完之后需要适当的延时再去读,不然会出错*/
ee_Delay(0x0FFFFF);
/*-----------------------------------------------------------------------------------*/
if (ee_ReadBytes(read_buf, 0, EEPROM_SIZE) == 0)
{
printf("读eeprom出错!\r\n");
return 0;
}
else
{
printf("读eeprom成功,数据如下:\r\n");
}
/*-----------------------------------------------------------------------------------*/
for (i = 0; i < EEPROM_SIZE; i++)
{
if(read_buf[i] != write_buf[i])
{
printf("0x%02X ", read_buf[i]);
printf("错误:EEPROM读出与写入的数据不一致");
return 0;
}
printf(" %02X", read_buf[i]);
if ((i & 15) == 15)
{
printf("\r\n");
}
}
printf("eeprom读写测试成功\r\n");
return 1;
}
/*********************************************END OF FILE**********************/
到了这里,关于stm32中的i2c协议的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!