单纯矩阵:A可对角化⇔①A可对角化;⇔②n个线性无关的特征向量; ⇔③每个特征值的几何重复度等于代数重复度;⇔④特征值λi对应的pi = n - rank(λiE - A)。
等价矩阵:A(λ)等价于B(λ)⇔① 任意k阶行列式因子相同Dk(λ);⇔②有相同的不变因子dk(λ);⇔③相同的初等因子,且秩相等。
相似矩阵:数字矩阵A∽B⇔①λE-A∽λE-B; ⇔②λE-A等价于λE-A;⇔③A,B相同的初等因子;⇔④A,B相同不变因子。
酉矩阵:AHA = AAH = E
正交矩阵:ATA = AAT = E
正规矩阵:AHA = AAH文章来源:https://www.toymoban.com/news/detail-815492.html
一、线性空间与线性变换【矩阵来源、基础】
非空集合V内的元素α,β满足加法运算和数乘运算,k,s为数域F上任意数,
① 交换律 α+β = β+α;②结合律 α+(β+γ) = (α+β)+γ;③零元素 α+0 = α;④负元素 α+β = 0;
①1·α = α;②k(sα) = (ks)α;③(k+s)α = kα+sα;④k(α+β) = kα+kβ ;
则称非空集合V为数域F上的线性空间。文章来源地址https://www.toymoban.com/news/detail-815492.html
- 齐次线性方程组Ax = 0所有解的集合构成实数域R(复数域C)上的线性空间,就是这个线性方程组的解空间,叫做矩阵A的核空间或零空间,用N(A)表示。–>N(A)就是方程组的解空间
- 设A为实数(复数)m*n矩阵,x为n维列向量,则m维列向量y = Ax构成实数域R(复数域C)上的线性空间,称为A的列空间或者A的值域,用R(A) 表示。–>R(A)就是矩阵A列向量的线性组合
- 线性空间的基A与基B满足B=AP 过度矩阵P为可逆矩阵(就是线性变换),则By = Ax,则APy = Ax,则x = Py,y = P-1x。即不同基下坐标表换公式。
- (A|E)–>(E|A-1)行变换、(A|B)–>(E|A-1B)行变换。
- 线性子空间:数域F上n维线性空间V的子集W满足:①α,β∈W,则α+β∈W;②α∈W,λ∈F,则λα∈W。
- 扩张空间:span{α1,α2,α3…} = k1α1+k2α2+k3α3+…–>基向量的线性组合
- 维数公式:dimV1+dimV2 = dim(V1+V2)+dim(V1∩V2)
- 求V1∩V2的基与维数:①列齐次线性方程组求公共解;②同一向量用两个基表示。
- 线性映射A :V1->V2满足:A(α1+α2) = A(α1)+A(α2);A(λα) = λA(α)。A(α1,α2,…) =(β1,β2,…)·D,则矩阵D为线性映射A的矩阵表示。–>给定矩阵D可以确定唯一的线性映射A
- 线性映射:线性相关经过映射后一定线性相关。线性无关经过线性映射之后不一定线性无关。
- V1->V2的线性映射在基{a}->{b}的矩阵表示为A,在基{a’}->{b’}的矩阵表示为B。{a}到{a’}的过度矩阵为P,{b}到{b’}的过度矩阵为Q,则AP=QB。
- ①B = QAP,B与A等价。②B = P-1AP,B与A相似。
- n阶方阵A有n个特征根(值),对应的每个特征值λi可求相应的特征向量。这些特征向量加上零向量构成n维向量空间的一个子空间,称特征子空间。特征值对应的重根数为代数重复度,特征子空间的维数为几何重复度。—> 代数重复度:特征值的次数;几何重复度:对应特征向量的个数。
二、λ-矩阵与Jordan标准型 【相似问题】
- 设aij(λ)为数域F上的多项式,则 以aij(λ)为元素的m*n矩阵为多项式矩阵或λ矩阵。数字矩阵和特征矩阵λE - A都是λ矩阵的特例。
- ① r阶子式不为0,r+1阶子式全为0,则rank A(λ) = r。
② A(λ)B(λ) = B(λ)A(λ) = E,则B(λ)为A(λ)的逆矩阵,记作A-1(λ).
③ A(λ)可逆的充要条件:det A(λ) 为非零常数。—>与数字矩阵相同,行列式值不为零 - 设λ-矩阵A(λ)的左上角元素a11(λ)≠0,并且A(λ)中至少有一个元素不能被他整除,那么一定可以找到一个与A(λ)等价的矩阵B(λ),它的左上角元素也不为零,但是次数比a11(λ)次数低。【Smith标准型化简原理,做初等变换】
- Smith标准形:任意一个非零的m*n阶λ-矩阵A(λ)都等价于一个“对角形矩阵”,即A(λ) = diag{d1(λ), d2(λ), …, dr(λ), 0,0,0…}。其中r≥1,di(λ)是首项系数为1的多项式,且di(λ) | di+1(λ)。前一项能被后一项整除。
- diag{d1(λ), d2(λ), …, dr(λ), 0,0,0…}即为A(λ)的Smith标准形。di(λ)为A(λ)的不变因子。
- 设λ-矩阵A(λ)的秩为r,对于正整数k,1 ≤ k ≤ r,A(λ)必有非零的k阶子式,A(λ)的全部k阶子式的首项系数为1的最大公因式Dk(λ)称为A(λ)的k阶行列式因子。等价矩阵有相同的个阶行列式因子,从而有相同的秩。Dk(λ) = d1(λ)d2(λ)…dk(λ)。dr(λ) = Dr(λ)/Dr-1(λ)。—>Smith标准型唯一
- 全部不变因子di(λ)分解为(λ-λi)乘积。则不为常数的因子全体叫做A(λ)的初等因子。指数某一项为0,则该列前面所有项次数均为0。—>不变因子相同,则初等因子相同。初等因子相同,若秩相同则不变因子相同。
-
Jordan标准型:因为只有部分矩阵可以相似对角化,故引入Jordan标准型,相似于准对角矩阵,类似对角矩阵。

- 设A∈Cn*n,A的初等因子为(λ-λ1)n1,(λ-λ2)n2,…(λ-λs)ns,则A∽J。J=diag{J1,J2,…Js}。所以A可对角化的充要条件为A的初等因子都是一次因式。
- ①求初等因子写Jordan标准型;②根据特征多项式写Jordan标准型,rank(λiE-A)=s1, rank(λiE-A)2=s2, rank(λiE-A)3=s3, rank(λiE-A)4=s4,…直到数值s不变。对应的λ = λi的Jordan块阶数如下:共有n-s1个块。阶数大于2的块有s1-s2个,大于3的有s2-s3个。大于r的有sr-1 - sr个。【两种方法】
三、内积空间与Hermite矩阵
- 设V是实数域R上的n维线性空间,对V中任意两个向量a,b依一确定法则对应着一个实数,这个实数称为内积,记作(a,b),并且要求内积(a,b)满足条件:①(a,b)=(b,a)②(ka,b)=k(a,b)③(a+b,c)=(a,c)+(b,c)④(a,a)≥0,当且仅当a=0时,(a,a)=0。有这样定义内积的n维线性空间称为n维欧氏空间。若在复数域C上,则为n维酉空间。【酉空间上的话计算注意取共轭】
- 内积空间性质:①(a,kb)=k’(a,b);②(a,b+c)=(a,b)+(a,c);③(∑kiai,b)=∑ki(ai,b);④(a,∑kibi)=∑ki’(a,bi)。【①④要对k取共轭】
- Hermite矩阵:AH=A则A为Hermite矩阵,AH=-A则A为反Hermite矩阵。AH为共轭转置矩阵。Hermite矩阵:对称位置实部相同,虚部相反。反Hermite矩阵:实部相反,虚部相同。
- 酉空间的度量:①非负性||a|| ≥ 0;②齐次性||ka|| = |k| ||a||;③三角不等式||a+b|| ≤ ||a|| + ||b||;④Cauchy-Schwarz不等式|(a,b)| ≤ ||a|| ||b||。
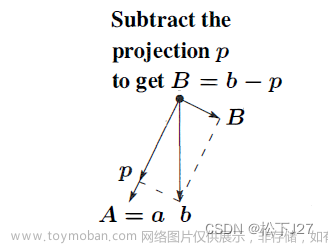
- 标准正交基,Schmidt正交化:①正交化b1 = a1;b2 = a2 - [(a2,b1)/(b1,b1)]b1;b3 = a3 - [(a3,b1)/(b1,b1)]b1 - [(a3,b2)/(b2,b2)]b2;…②单位化:v1 = b1/||b1||,…
- 酉矩阵:AHA = AAH = E,则称A为酉矩阵,记为A∈Unn。则①A-1 = AH∈Unn;②|detA| = 1;③AT∈Unxn;④AB,BA∈Unxn。正交矩阵:ATA = AAT =E。矩阵A是酉矩阵(正交矩阵)的充要条件是A的n个列(行)向量是标准正交向量组。
- 若a1,a2,…,ar为n为标准正交向量组,则nxr矩阵U1=(a1,a2,…ar)为次酉矩阵,记为U1∈Unxr。充要条件:U1HU1 = Er。
- 正规矩阵:若AHA = AAH,则A 为正规矩阵。ATA = AAT则A为实正规矩阵。
- Hermite矩阵的性质:①A是Hermite矩阵,则Ak也是Hermite矩阵;②A是可逆的Hermite矩阵,则A-1也是Hermite矩阵;③A是Hermite矩阵(反Hermite矩阵)则iA是反Hermite矩阵(Hermite矩阵);④A,B是Hermite矩阵,则kA + lB是Hermite矩阵;⑤A,B是Hermite矩阵,则AB是Hermite矩阵充要条件是AB= BA。A,B可交换。
- 设A∈Cnxn,则A是Hermite矩阵的充要条件是存在U∈Un*n,使得UHAU = diag(λ1,λ2,…λn)。特征值为实数。
- n阶Hermite(实对称)矩阵A = (aij) 正定的充要条件是A的n个顺序主子式全大于零。对于Hermite二次齐式f(X) = XHAX,X∈Cn则下列命题等价:
①f(X)是正定的;
②对于任意n阶可逆矩阵P,都有PHAP为正定矩阵;
③A的n个特征值全大于零;
④存在n阶可逆矩阵P使得PHAP = E;
⑤存在n阶可逆矩阵Q,使得A= QHQ;
⑥存在正线上三角矩阵R,使得A = RHR,且分解是唯一的。
四、矩阵分解
-
满秩分解
设A∈Cr mxn,则存在B∈Cr mxr, C∈Cr rxn,满足A=BC。 对A只做初等变换就可以得到A的满秩分解。经过初等行列变换可得:PAQ =[Er D; 0 0]。A = P-1[Er D;0 0]Q-1 = P-1[Er; 0] *[Er D]Q-1 = BC 。故B= P-1[Er;0], C = [Er D]Q-1。【初等行变换->B = A 中线性无关的r列,C=变换后的非零行,满秩分解不唯一】 -
正交三角分解
设A∈Cn nxn,则A可以唯一分解为A = UR或A= R1U1。 其中U,U1∈Un*n,R是正线上三角阵,R1是正线下三角阵。若A∈Cr mxr(列满秩矩阵),则A可以唯一分解为A= UR,U∈Ur mxr,R是r阶正线上三角矩阵。若A∈Cr mxn,则A可以分解为A = U1R1L2U2。【直接对A作正交单位化–>U,R = UHA】 -
奇异值分解
设A∈Cr mxn,AAH的正特征值λi,AHA的正特征值ui,称ai =√λi=√ui是A的正奇异值,简称奇异值。
若A是正规矩阵,则A的奇异值是A的非零特征向量的模长。
若A∈Cr mxn,λ1 ≥ λ2 ≥ … ≥ λr是A的r个正奇异值,则存在m阶酉矩阵U和n阶酉矩阵V满足A = UDVH = U [Δ 0; 0 0]VH,其中Δ=diag(λ1,λ2,…λr),U满足UHAAHU是对角矩阵,V满足VHAHAV也是对角矩阵。 【U=(u1,u2,…)为AAH非零特征值对应的特征向量,V=AHUΔ-H来计算】 -
谱分解
①正规矩阵的谱分解:设A为正规矩阵,那么存在U∈Unxn,满足A = Udiag(λ1,λ2,…λn)UH。若命U = (a1,a2,…an),则A = (a1,a2,…an)diag(λ1,λ2,…λn)(a1H,a2H,…anH)T = λ1a1a1H + λ2a2a2H+…。其中ai是矩阵A的特征值为λi的所对应的单位特征向量,a1a1H是n阶矩阵,即为谱分解。
设n阶矩阵A有r个相异特征值λ1,λ2,…λr,λi的代数重复度为ni,则A为正规矩阵的充要条件是存在r个n阶矩阵G1,G2,…Gr,满足:(1)A = ∑λiGi; (2)Gj = Gj2 = GjH [幂等矩阵,Hermite矩阵]; (3)GjGk = 0; (4)∑Gj = E; (5)满足上述性质的Gj唯一; (6)rank Gj = nj。
②单纯矩阵的谱分解:设A为单纯矩阵(即A可对角化),特征值为λ1,…,λn,其对应的特征向量分别为a1,…an,若命P = (a1,a2,…an),则A = Pdiag(a1,a2,…an)P-1 = λ1a1b1T+λ2a2b2T+…
分解步骤:(1)先求出矩阵A的特征值λi与特征向量ai;(2)根据矩阵转置的性质得到(P-1)T = (b1,b2,…bn);(3)令Gi = aibiT+…(同一特征值对应的多个特征向量的求和),A = λ1G1 + λ2G2 + …
五、矩阵范数、序列、级数
-
向量范数
设V是数域F(实数域R或复数域C)上的线性空间,用||x||表示按照某个法则确定的与向量x对应的实数,且满足:(1)非负性:||x|| ≥ 0,当且仅当x=0时||x|| = 0;(2)齐次性||kx|| = |k| ||x||;(3)三角不等式||x+y|| ≤ ||x|| + ||y||,则称||x||是向量x的范数。
Holder不等式(赫尔德):∑akbk ≤ (∑akp)1/p (∑bkq)1/q。【k为求和下标,q,p为幂次】
Minkowski不等式(闵可夫斯基):( ∑|ai+bi|p )1/p ≤ (∑|ai|p)1/p + (∑|bi|p)1/p。【i为下标,p为幂次】
设向量x = (x1,x2,…xn)T对任意p≥1,称量||x||p = (∑ |xi|^p) 1/p为向量x的p-范数。常用范数有三种:
①1-范数:||x||1 = ∑|xi|;【元素和】
②2-范数:||x||2 = (∑ |xi|2) 1/2 = (xHx)1/2;【欧式范数】
③∞-范数:||x||∞ = lim||x||p = max|xi|。【最大元素值】
范数等价性定理:设V是n维线性空间,||x||a和||x||b为任意两种向量范数(不限于p-范数),则总存在正数c1,c2,对V中所有向量x∈V恒有:c1||x||b ≤ ||x||a ≤ c2||x||b。 -
矩阵范数
矩阵范数满足非负性、齐次性、三角不等式和矩阵乘法相容性:若A与B可乘,有||AB|| ≤ ||A|| ||B||。则对应的实数||A||为矩阵A的矩阵范数。
Frobenius范数:若A = (aij)∈Cmxn,规定||A||F = (∑∑|aij|^2)1/2。【各元素平方和开二次根】是向量范数中欧式范数的形式推广。性质:(1)若A = (a1,a2,…an),则||A||F 2 = ∑||ai||2 2;(2)||A||F 2 = tr(AHA) = ∑λi(AHA);(3)对于任何m阶酉矩阵U与n阶酉矩阵V,都有等式||A||F = ||UA||F = ||AH||F = ||AV||F = ||UAV||F。 -
诱导范数(算子范数)
相容的矩阵范数:设||x||a是向量范数,||A||b是矩阵范数,若对于任意矩阵A和向量x都满足 ||Ax||a ≤ ||A||b ||x||a,则称||A||b为与向量范数||x||a相容的矩阵范数。
||A||p = max ||Ax||p / ||x||p即为向量p-范数所诱导的矩阵范数为矩阵p-范数。常用矩阵范数为:
①||A||1 = max j(∑|aij|);【最大列和】
②||A||2 = max j(λj(AHA))1/2,λj(AHA)表示矩阵AHA的第j个特征值。||A||2称为谱范数,是A的最大正奇异值。
③||A||∞ = max i(∑|aij|)。【最大行和】
谱半径:设A∈Cnxn,A的n个特征值为λ1,λ2,…λn,则称ρ(A) = max{|λi|}是A的谱半径。ρ(A) ≤ ||A||,其中||A||是A的任一种范数。 -
矩阵序列极限
①对于矩阵A的某一种范数||A|| < 1,则lim Ak = 0;【k次幂】
②ρ(A) < 1 等价于lim Ak = 0;【k次幂】
③{Ak}收敛于A等价于lim ||Ak - A|| = 0。【k为下标】 -
矩阵幂级数
①矩阵级数:每一个元素都绝对收敛的时候,则矩阵级数绝对收敛。矩阵级数∑Ak绝对收敛的充要条件为:正项数项级数∑||Ak||,其中||A||为任何一种矩阵范数。
②若矩阵幂A的某一种范数||A||在幂级数c0+c1x+c2x2+…的收敛域内,则矩阵幂级数c0E +c1A+c2A2+…绝对收敛。
六、矩阵函数
- 用矩阵函数的Jordan表示计算矩阵函数的步骤:
①求A的Jordan标准型,J = diag(J1,J2,…,Jr)
②由J写出f(J) = diag(f(J1),f(J2),…f(Jr))
③由J计算变换矩阵P,满足AP = PJ。
④写出f(A)的Jordan表示式f(A) = Pf(J)P-1
⑤把所求矩阵函数f(A)所对应的函数f(x)带入Pf(J)P-1。 -
化零多项式:
给定矩阵A∈Cnxn,如果多项式p(λ) = amλm + …+a1λ+a0,满足p(A) = 0,则称p(λ)为A的化零多项式。 -
最小多项式:
在A的化零多项式中,次数最低且首项稀疏为1的化零多项式称为A的最小多项式。记为ψA(λ).
①方阵A的任意化零多项式都能被ψA(λ)整除;
②A的最小多项式ψA(λ)是唯一的;
③相似矩阵的最小多项式相同。 -
矩阵函数的多项式表示:
p(x) = a0+a1x+a2x2+…+am-1xm-1。
①写出最小多项式;
②根据次数取p(x)的前k项;
③解出a0,a1,…ak-1;
④带入f(A) = p(A) = a0E + a1A+… + ak-1Ak-1
到了这里,关于【矩阵分析】线性空间、λ矩阵、内积空间、Hermite矩阵、矩阵分解、矩阵范数、矩阵函数的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!