前言
本文主要讲解基于STM32的红外避障小车的实现(标准库)
1、项目简介
基于stm32实现的一个简单智能避障小车,具有“直行”、转弯、“避障”的功能。
直行、转弯:基于stm32的通用定时器TIM3输出PWM方波信号实现
避障:使用到stm32的外部中断以及通用定时器(使用红外中断),代码编写使用STM32F1的标准库
具体执行流程:红外传感器作为外部输入,它的OUT引脚默认输出高电平,当检测到障碍物时OUT引脚会输出低电平,因此会有一个高电平到低电平的变化,我们称之为“下降沿”。因此我们可以把stm32设置为“下降沿”触发外部中断这样一种机制,因此,当红外对管检测到障碍物时,stm32会被触发中断,由于我们在小车的左右两边都安装了一红外接口,当左边检测到障碍物时候,执行右转直到转弯完成,同理当右边检测到障碍物时候,执行左转直到转弯完成。最终完成避障功能
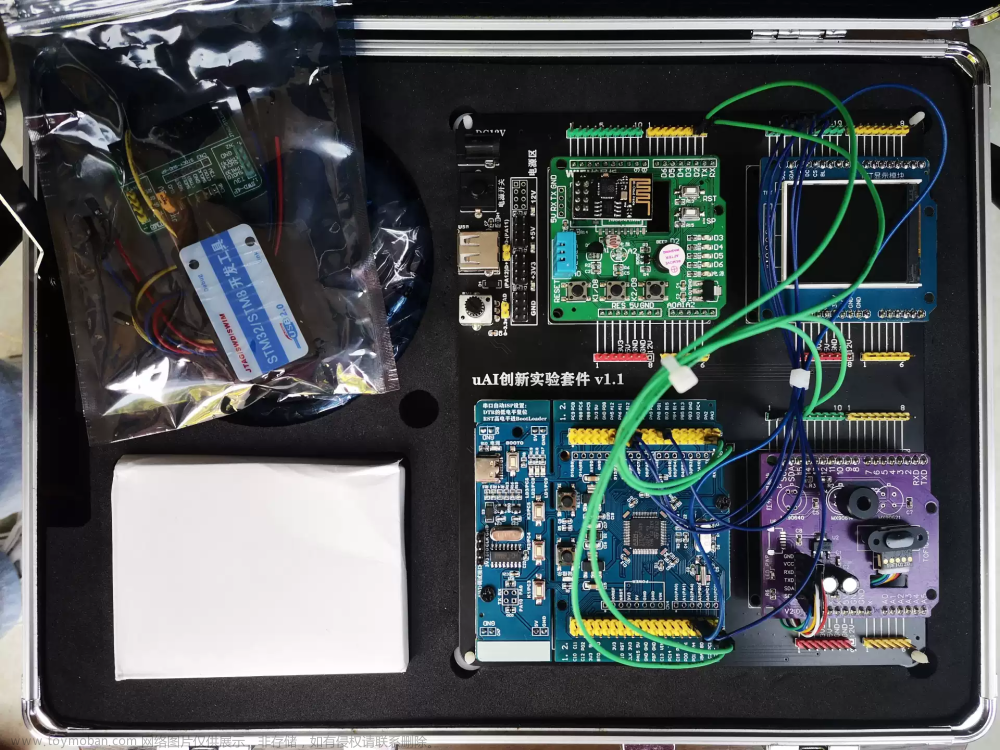
2、硬件准备
1、stm32f103vet6指南者开发板一块,用作主控芯片(这个学习用的开发板,建议后期用最小系统板子,例如stm32f103c8t6)
2、带编码盘的直流电机两个,编码盘在本项目里面没啥用
3、直流电机驱动模块(L298N直流电机驱动模块)
4、红外避障传感器(两个)
5、转向轮一个、塑料轮子两个
6、18650电池两节和电池盒(用作电源,需要降压到5V)
7、铜柱、螺丝螺母、杜邦线若干
8、电烙铁(用于后续焊接)
3 设计图

1:电源采用两节18650电池供电,每节4.2V,确保足够驱动两个电机,连接电机驱动模块的12V输入
2:由于STM32的要求输入的电压有限制,只允许输入电压是3.3或者5V的,因此需要采用降压模块LM2596S1将电压降到5V才可以连接到开发板上。但是由于L2980N又5V的电压输出口,因此直接将5V的电压输出口连接开发板即可
3:之后开发板通过通用定时器输出4路PWM方波信号连接电机驱动模块(L2980N),通过编写代码调整占空比对小车实现差速控制。
4 各个模块介绍
4.1 主控芯片STM32F103VET6介绍
stm32f103vet6芯片具有功能各异且可复用的100个引脚并集成了如USART(通用同步/异步串行接收/发送器)、I2C (I2C总线) 和SPI (串行外设接口)等常用通信接口,可用于外接各种传感器和执行器以控制其他设备。本项目主要用到外部中断和定时器。
4.2 L298N直流电机驱动模块
模块介绍

依次介绍每个部分:从左至右,由上到下,
1、输出A:可以看到输出A和B都有两个螺丝接线,每个正好接马达的正负,如何判断是哪个是正呢?正对输出口的右边是正。
2、板载5v使能:这是个跳线帽,可选项,接上表示不用5v供电,如果拔掉的话就需要5v供电了;
3、12v供电:这个供电是必须的,我用的是两节18650充电电池。
4、供电GND:这个不用说,就是电池的负极,注意这里,单片机的GND也需要连接这个,否则马达不会转动。
5、5v供电:这个也可以作为输出口,为我们的单片机来供电。
6、通道A使能:这个是使能输出A的,也要跳线帽连接,否则A侧马达不转,个人觉得没有什么用。
7、通道B使能:同A
8、逻辑输入:这里的逻辑输入有4个引脚:IN1,IN2.IN3,IN4,由这些引脚的电平状态来控制两个马达的正转,反转,停止。详细的介绍见下表。
9、输出B:同输出A。

注意:我的l298n黑色部分靠近车头,得出的表格
模块原理
我们想让小车前进,转向,后退,那么就需要单片机控制这四个IN引脚的高低实现我们想要的功能。由于我使用的是通用定时器,使用定时器输出了四路PWM方波信号,分别接在IN1,IN2,IN3和IN4上,通过调节占空比实现车子的前进后退和转弯,例如要实现左转弯,则轮子倒转,右轮子正转,反之则为右转。总之,PWM主要就是用来调速的。
代码如下:
void TIM3_PWM_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructer;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructer;
TIM_OCInitTypeDef TIM_OCInitStructer;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOC | RCC_APB2Periph_AFIO, ENABLE); //
GPIO_PinRemapConfig(GPIO_FullRemap_TIM3,ENABLE);
//初始化TIM3
TIM_TimeBaseStructer.TIM_Period = 899;
TIM_TimeBaseStructer.TIM_Prescaler = 0;
TIM_TimeBaseStructer.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseStructer.TIM_ClockDivision = 0;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructer);
//初始化GPIOC6/GPIOC7 (TIM3_CH1/TIM3_CH2)
GPIO_InitStructer.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructer.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructer.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOC, &GPIO_InitStructer);
//初始化GPIOC8/GPIOC9 (TIM3_CH3/TIM3_CH4)
GPIO_InitStructer.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9;
GPIO_InitStructer.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructer.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOC, &GPIO_InitStructer);
//PWM通道一
TIM_OCInitStructer.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructer.TIM_OutputState = TIM_OutputState_Enable; /*比较输出使能,决定信号是否通过外部引脚输出。value:0(Disable)、1(Enable)。*/
TIM_OCInitStructer.TIM_OCPolarity = TIM_OCPolarity_High; /*比较输出极性,决定定时器通道有效电平的极性。*/
TIM_OCInitStructer.TIM_Pulse = 900;
TIM_OC1Init(TIM3, &TIM_OCInitStructer);
//Enables or disables the TIMx peripheral Preload register on CCR1.
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);
//PWM通道二
TIM_OCInitStructer.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructer.TIM_OutputState = TIM_OutputState_Enable; /*比较输出使能,决定信号是否通过外部引脚输出。value:0(Disable)、1(Enable)。*/
TIM_OCInitStructer.TIM_OCPolarity = TIM_OCPolarity_High; /*比较输出极性,决定定时器通道有效电平的极性。*/
TIM_OCInitStructer.TIM_Pulse = 900;
TIM_OC2Init(TIM3, &TIM_OCInitStructer);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
//PWM通道三
TIM_OCInitStructer.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructer.TIM_OutputState = TIM_OutputState_Enable; /*比较输出使能,决定信号是否通过外部引脚输出。value:0(Disable)、1(Enable)。*/
TIM_OCInitStructer.TIM_OCPolarity = TIM_OCPolarity_High; /*比较输出极性,决定定时器通道有效电平的极性。*/
TIM_OCInitStructer.TIM_Pulse = 900;
TIM_OC3Init(TIM3, &TIM_OCInitStructer);
TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable);
//PWM通道四
TIM_OCInitStructer.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructer.TIM_OutputState = TIM_OutputState_Enable; /*比较输出使能,决定信号是否通过外部引脚输出。value:0(Disable)、1(Enable)。*/
TIM_OCInitStructer.TIM_OCPolarity = TIM_OCPolarity_High; /*比较输出极性,决定定时器通道有效电平的极性。*/
TIM_OCInitStructer.TIM_Pulse = 900;
TIM_OC4Init(TIM3, &TIM_OCInitStructer);
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_Cmd(TIM3, ENABLE);
}
//前进
void Go_Forward(void)
{
//Sets the TIMx Capture Compare1 Register value
TIM_SetCompare1(TIM3, 300);
TIM_SetCompare2(TIM3, 900);
TIM_SetCompare3(TIM3, 300);
TIM_SetCompare4(TIM3, 900);
}
//停止
void Stop(void)
{
TIM_SetCompare1(TIM3, 900);
TIM_SetCompare2(TIM3, 900);
TIM_SetCompare3(TIM3, 900);
TIM_SetCompare4(TIM3, 900);
}
//后退
void Go_Back(void)
{
TIM_SetCompare1(TIM3, 900);
TIM_SetCompare2(TIM3, 300);
TIM_SetCompare3(TIM3, 900);
TIM_SetCompare4(TIM3, 300);
}
//左转
void Turn_Left(void)
{
TIM_SetCompare1(TIM3, 900);
TIM_SetCompare2(TIM3, 350);
TIM_SetCompare3(TIM3, 350);
TIM_SetCompare4(TIM3, 900);
}
//右转
void Turn_Right(void)
{
TIM_SetCompare1(TIM3, 350);
TIM_SetCompare2(TIM3, 900);
TIM_SetCompare3(TIM3, 900);
TIM_SetCompare4(TIM3, 350);
}
4.3 红外传感器
模块原理:器件有三个引脚,VCC和GND,OUT就是输出信号用的,其实输出的就是高低电平两种状态(高电平为3.3V,低电平为0V;高电平读出来就是“1”,低电平读出来就是“0”)。
这个器件上电以后,OUT引脚默认输出高电平,当检测到障碍物时OUT引脚会输出低电平,因此会有一个高电平到低电平的变化,我们称之为“下降沿”。我们可以把stm32设置为“下降沿”触发外部中断这样一种机制,因此,当红外对管检测到障碍物时,stm32会被触发中断,从而去执行我们事先编写好的一段程序。
代码如下:
#include "bsp_exti.h"
#include "bsp_usart.h"
static void EXTI_INFRAREDAVOID_NVIC_Config(void) //static限制这个函数只能被EXTI_Key_Config()调用
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//红外1中断
NVIC_InitStructure.NVIC_IRQChannel=INFRAREDAVOID1_INT_EXTI_IRQ;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=2;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);
//红外2中断
NVIC_InitStructure.NVIC_IRQChannel = INFRAREDAVOID2_INT_EXTI_IRQ;
/* 抢断优先级*/
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
/* 子优先级 */
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;
/* 使能中断 */
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
/* 初始化配置NVIC */
NVIC_Init(&NVIC_InitStructure);
}
//外部中断红外1配置
void EXTI_INFRAREDAVOID1_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure; // 定义初始化结构体
EXTI_InitTypeDef EXTI_InitStructure;
//配置中断优先级
EXTI_INFRAREDAVOID_NVIC_Config();
/*配置红外*/
//初始化用于中断的GPIO(具体的外设)
RCC_APB2PeriphClockCmd(INFRAREDAVOID1_INT_GPIO_CLK,ENABLE); //开红外的时钟
GPIO_InitStructure.GPIO_Pin=INFRAREDAVOID1_INT_GPIO_PIN; //选择GPIO要控制的引脚4
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_Init(INFRAREDAVOID1_INT_GPIO_PORT,&GPIO_InitStructure);
//初始化EXTI(具体的外设)
GPIO_EXTILineConfig(INFRAREDAVOID1_INT_EXTI_PortSource,INFRAREDAVOID1_INT_EXTI_PinSource); //配置输入源
EXTI_InitStructure.EXTI_Line=INFRAREDAVOID1_INT_EXTI_LINE; //因为是PA4,所以是Line4
EXTI_InitStructure.EXTI_Mode=EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger=EXTI_Trigger_Falling; //配置为下降沿触发中断
EXTI_InitStructure.EXTI_LineCmd=ENABLE;
EXTI_Init(&EXTI_InitStructure); //把结构体成员写到相应的寄存器里
}
//外部中断红外2配置
void EXTI_INFRAREDAVOID2_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure; // 定义初始化结构体
EXTI_InitTypeDef EXTI_InitStructure;
//配置中断优先级
EXTI_INFRAREDAVOID_NVIC_Config();
/*配置红外*/
//初始化用于中断的GPIO(具体的外设)
RCC_APB2PeriphClockCmd(INFRAREDAVOID2_INT_GPIO_CLK,ENABLE); //开红外的时钟
GPIO_InitStructure.GPIO_Pin=INFRAREDAVOID2_INT_GPIO_PIN; //选择GPIO要控制的引脚4
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_Init(INFRAREDAVOID2_INT_GPIO_PORT,&GPIO_InitStructure);
//初始化EXTI(具体的外设)
GPIO_EXTILineConfig(INFRAREDAVOID2_INT_EXTI_PortSource,INFRAREDAVOID2_INT_EXTI_PinSource); //配置输入源
EXTI_InitStructure.EXTI_Line=INFRAREDAVOID2_INT_EXTI_LINE; //因为是PA4,所以是Line4
EXTI_InitStructure.EXTI_Mode=EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger=EXTI_Trigger_Falling; //配置为下降沿触发中断
EXTI_InitStructure.EXTI_LineCmd=ENABLE;
EXTI_Init(&EXTI_InitStructure); //把结构体成员写到相应的寄存器里
}
5 具体连接
-
1、电源:将两节电池串联,电源的正极连接L2980N的12V输入,电源的负极连接L2980N的GND。
-
2:接下来是STM32的连接
-
红外中断:由于我使用的是外部中断3和外部中断4,对应的IO口分别是PA3和PC4,因此将
PA3->OUT,3.3V->VCC,GND->DND。同理PC4->OUT,3.3V->VCC,GND->DND。 -
L2980N:上面有L2980N的介绍,这里就不多赘述了。我使用的是通用定时器TIM3的4个通道。CH1的PC6口,CH2的PC7口,CH3的PC8口,CH4的PC9口。
- 12V供电->电源正极
- GND->电源负极和开发板GND
- 5V供电->开发板的VCC
- 5V供电->开发板的VCC
- 逻辑输入分别接开发板的PC6,PC7,PC8,PC9
- 逻辑输出A连接电机分别连接电机的正负极,正对输出口的右边是正
- 逻辑输出B连接电机分别连接电机的正负极,正对输出口的右边是正
- 通道A使能:这个是使能输出A的,也要跳线帽连接,否则A侧马达不转,个人觉得没有什么用一开始就连接好了,不用动。
- 通道B使能:这个是使能输出B的,也要跳线帽连接否则A侧马达不转,个人觉得没有什么用,,一开始就连接好了,不用动。
-
红外中断:由于我使用的是外部中断3和外部中断4,对应的IO口分别是PA3和PC4,因此将
连接图如下:
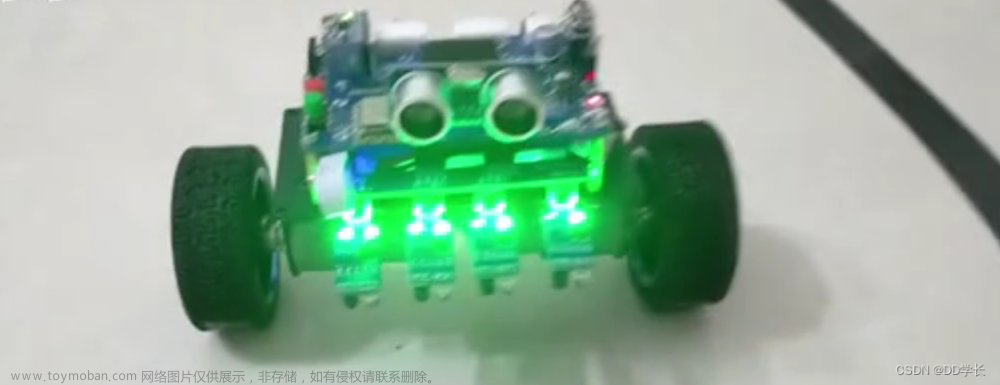
6 效果展示及改进建议
实物展示:

改进建议
-
1:使用超声波模块代替红外模块
- 由于红外传感器会受到光线和距离的限制,从而会导致最后实验的结果不是特别理想尽管能达到简单避障效果,但是还有待提高。建议后续使用超声波模块hc-sr04代替红外模块。超声波的检测距离长,且稳定性十分好。
超声波模块原理:用声音在空气中传播并且遇到障碍物会反射的效果,再根据声音在空气中的传播速度,计算出前方的距离。
-
2:使用舵机模块SG90
- 既然碰到障碍物要转弯,那到底转多少角度呢?使用舵机模块就可以很好的解决这一问题。
舵机模块原理:
- 其实舵机可以分为两种,一种是模拟舵机,一种是数字舵机,这两者的区别是:模拟舵机需要一直给与要转的角度命令,直到到自己想要的角度,注意这个给定的时间许多不许少,就像是小孩子一样,你要不断的给与鼓励和奖赏,才会达到自己的要求;而数字舵机是只需要给定一次角度命令就行了,就像是长大了的孩子,你可以把事情很放心的交给他,说一次就好。
- 说了半天,那么角度命令是什么呢?其实就是我们熟悉的pwm信号,下面给出占空比与旋转的角度之间的关系:

注意:
1)、高电平加上低电平等于 20ms,那是因为要求的pwm频率是50hz,1s/50 = 20ms,所以周期就是20ms。
2)、角度怎么看,想象自己站在xy轴的0坐标上,正对着y轴,y轴就是0度。负度在左手边,正度在右手边。
3)、其实低电平的时间并没有那么死板,只要在0.5ms和20ms之间就可以。
7 源码展示
我是使用野火的指南者板子,用的是标准库首先创建文件
bsp_exti.c: 用于保存红外中断函数代码bsp_exti.h: 用于保存红外中断函数的声明bsp_led.c: 用于保存开发板上的LED灯函数的代码,我们要实现红外模块遇到障碍物触发中断,亮红灯。bsp_led.h: 用于保存开发板上的LED灯函数的声明的代码,我们要实现红外模块遇到障碍物触发中断,亮红灯bsp_l2980n.c: 用于保存电机驱动模块函数的代码(通用定时器输出4路PWM方波信号)bsp_l2980n.h: 用于保存电机驱动模块函数声明的代码stm32f10x.c:这个文件库函数本来就有,主要保存我们自己写的中断服务函数(触发中断后要让单片机干啥事情)main.c:主函数
完整源码如下:可直接跑的哦文章来源:https://www.toymoban.com/news/detail-816172.html
bsp_exti.c
#include "bsp_exti.h"
static void EXTI_INFRAREDAVOID_NVIC_Config(void) //static限制这个函数只能被EXTI_Key_Config()调用
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//红外1中断
NVIC_InitStructure.NVIC_IRQChannel=INFRAREDAVOID1_INT_EXTI_IRQ;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=2;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);
//红外2中断
NVIC_InitStructure.NVIC_IRQChannel = INFRAREDAVOID2_INT_EXTI_IRQ;
/* 抢断优先级*/
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
/* 子优先级 */
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;
/* 使能中断 */
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
/* 初始化配置NVIC */
NVIC_Init(&NVIC_InitStructure);
}
//外部中断红外1配置
void EXTI_INFRAREDAVOID1_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure; // 定义初始化结构体
EXTI_InitTypeDef EXTI_InitStructure;
//配置中断优先级
EXTI_INFRAREDAVOID_NVIC_Config();
/*配置红外*/
//初始化用于中断的GPIO(具体的外设)
RCC_APB2PeriphClockCmd(INFRAREDAVOID1_INT_GPIO_CLK,ENABLE); //开红外的时钟
GPIO_InitStructure.GPIO_Pin=INFRAREDAVOID1_INT_GPIO_PIN; //选择GPIO要控制的引脚4
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_Init(INFRAREDAVOID1_INT_GPIO_PORT,&GPIO_InitStructure);
//初始化EXTI(具体的外设)
GPIO_EXTILineConfig(INFRAREDAVOID1_INT_EXTI_PortSource,INFRAREDAVOID1_INT_EXTI_PinSource); //配置输入源
EXTI_InitStructure.EXTI_Line=INFRAREDAVOID1_INT_EXTI_LINE; //因为是PA4,所以是Line4
EXTI_InitStructure.EXTI_Mode=EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger=EXTI_Trigger_Falling; //配置为下降沿触发中断
EXTI_InitStructure.EXTI_LineCmd=ENABLE;
EXTI_Init(&EXTI_InitStructure); //把结构体成员写到相应的寄存器里
}
//外部中断红外2配置
void EXTI_INFRAREDAVOID2_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure; // 定义初始化结构体
EXTI_InitTypeDef EXTI_InitStructure;
//配置中断优先级
EXTI_INFRAREDAVOID_NVIC_Config();
/*配置红外*/
//初始化用于中断的GPIO(具体的外设)
RCC_APB2PeriphClockCmd(INFRAREDAVOID2_INT_GPIO_CLK,ENABLE); //开红外的时钟
GPIO_InitStructure.GPIO_Pin=INFRAREDAVOID2_INT_GPIO_PIN; //选择GPIO要控制的引脚4
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_Init(INFRAREDAVOID2_INT_GPIO_PORT,&GPIO_InitStructure);
//初始化EXTI(具体的外设)
GPIO_EXTILineConfig(INFRAREDAVOID2_INT_EXTI_PortSource,INFRAREDAVOID2_INT_EXTI_PinSource); //配置输入源
EXTI_InitStructure.EXTI_Line=INFRAREDAVOID2_INT_EXTI_LINE; //因为是PA4,所以是Line4
EXTI_InitStructure.EXTI_Mode=EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger=EXTI_Trigger_Falling; //配置为下降沿触发中断
EXTI_InitStructure.EXTI_LineCmd=ENABLE;
EXTI_Init(&EXTI_InitStructure); //把结构体成员写到相应的寄存器里
}
bsp_exti.h
#ifndef _BSP_EXTI_H
#define _BSP_EXTI_H
#include "stm32f10x.h"
//infrared红外 obstacle avoidance避障
//红外1
#define INFRAREDAVOID1_INT_GPIO_PIN GPIO_Pin_3
#define INFRAREDAVOID1_INT_GPIO_PORT GPIOA
#define INFRAREDAVOID1_INT_GPIO_CLK (RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO |RCC_APB2Periph_GPIOB)
#define INFRAREDAVOID1_INT_EXTI_PortSource GPIO_PortSourceGPIOA
#define INFRAREDAVOID1_INT_EXTI_PinSource GPIO_PinSource3
#define INFRAREDAVOID1_INT_EXTI_LINE EXTI_Line3
#define INFRAREDAVOID1_INT_EXTI_IRQ EXTI3_IRQn
#define INFRAREDAVOID1_IRQHandler EXTI3_IRQHandler
//红外2
#define INFRAREDAVOID2_INT_GPIO_PIN GPIO_Pin_4
#define INFRAREDAVOID2_INT_GPIO_PORT GPIOC
#define INFRAREDAVOID2_INT_GPIO_CLK (RCC_APB2Periph_GPIOC | RCC_APB2Periph_AFIO |RCC_APB2Periph_GPIOB)
#define INFRAREDAVOID2_INT_EXTI_PortSource GPIO_PortSourceGPIOC
#define INFRAREDAVOID2_INT_EXTI_PinSource GPIO_PinSource4
#define INFRAREDAVOID2_INT_EXTI_LINE EXTI_Line4
#define INFRAREDAVOID2_INT_EXTI_IRQ EXTI4_IRQn
#define INFRAREDAVOID2_IRQHandler EXTI4_IRQHandler
void EXTI_INFRAREDAVOID1_Config(void);
void EXTI_INFRAREDAVOID2_Config(void);
#endif
bsp_led.c
#include "bsp_led.h"
void LED_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure; // 定义初始化结构体
RCC_APB2PeriphClockCmd(LED1_GPIO_CLK | LED2_GPIO_CLK | LED3_GPIO_CLK, ENABLE); //开灯时钟
GPIO_InitStructure.GPIO_Pin=LED1_GPIO_PIN; //选择GPIO要控制的引脚0
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(LED1_GPIO_PORT,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin=LED2_GPIO_PIN; //选择GPIO要控制的引脚1
GPIO_Init(LED2_GPIO_PORT,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin=LED3_GPIO_PIN; //选择GPIO要控制的引脚5
GPIO_Init(LED3_GPIO_PORT,&GPIO_InitStructure);
//熄灭所有灯
GPIO_SetBits(LED1_GPIO_PORT,LED1_GPIO_PIN);
GPIO_SetBits(LED2_GPIO_PORT,LED2_GPIO_PIN);
GPIO_SetBits(LED3_GPIO_PORT,LED3_GPIO_PIN);
}
bsp_led.h
#ifndef _BSP_LED_H
#define _BSP_LED_H
#include "stm32f10x.h"
/* 定义LED连接的GPIO端口, 用户只需要修改下面的代码即可改变控制的LED引脚 */
// G-绿色
#define LED1_GPIO_PORT GPIOB /* GPIO端口 */
#define LED1_GPIO_CLK RCC_APB2Periph_GPIOB /* GPIO端口时钟 */
#define LED1_GPIO_PIN GPIO_Pin_0 /* 连接到SCL时钟线的GPIO */
// B-蓝色
#define LED2_GPIO_PORT GPIOB /* GPIO端口 */
#define LED2_GPIO_CLK RCC_APB2Periph_GPIOB /* GPIO端口时钟 */
#define LED2_GPIO_PIN GPIO_Pin_1 /* 连接到SCL时钟线的GPIO */
// R-红色
#define LED3_GPIO_PORT GPIOB /* GPIO端口 */
#define LED3_GPIO_CLK RCC_APB2Periph_GPIOB /* GPIO端口时钟 */
#define LED3_GPIO_PIN GPIO_Pin_5 /* 连接到SCL时钟线的GPIO */
#define ON 1
#define OFF 0
#define LED1_G(a) if(a) \
GPIO_ResetBits(LED1_GPIO_PORT,LED1_GPIO_PIN);\
else GPIO_SetBits(LED1_GPIO_PORT,LED1_GPIO_PIN);
#define LED2_B(a) if(a) \
GPIO_ResetBits(LED2_GPIO_PORT,LED2_GPIO_PIN);\
else GPIO_SetBits(LED2_GPIO_PORT,LED2_GPIO_PIN);
#define LED3_R(a) if(a) \
GPIO_ResetBits(LED3_GPIO_PORT,LED3_GPIO_PIN);\
else GPIO_SetBits(LED3_GPIO_PORT,LED3_GPIO_PIN);
#define LED1_TOGGLE {LED1_GPIO_PORT->ODR ^=LED1_GPIO_PIN;} //绿灯状态翻转
#define LED2_TOGGLE {LED2_GPIO_PORT->ODR ^=LED2_GPIO_PIN;} //蓝灯状态翻转
#define LED3_TOGGLE {LED3_GPIO_PORT->ODR ^=LED3_GPIO_PIN;} //红灯状态翻转
void LED_GPIO_Config(void);
#endif
bsp_l2980n.c
#include "bsp_l298n.h"
void TIM3_PWM_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructer;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructer;
TIM_OCInitTypeDef TIM_OCInitStructer;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOC | RCC_APB2Periph_AFIO, ENABLE); //
GPIO_PinRemapConfig(GPIO_FullRemap_TIM3,ENABLE);
//初始化TIM3
TIM_TimeBaseStructer.TIM_Period = 899;
TIM_TimeBaseStructer.TIM_Prescaler = 0;
TIM_TimeBaseStructer.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseStructer.TIM_ClockDivision = 0;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructer);
//初始化GPIOC6/GPIOC7 (TIM3_CH1/TIM3_CH2)
GPIO_InitStructer.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructer.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructer.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOC, &GPIO_InitStructer);
//初始化GPIOC8/GPIOC9 (TIM3_CH3/TIM3_CH4)
GPIO_InitStructer.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9;
GPIO_InitStructer.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructer.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOC, &GPIO_InitStructer);
//PWM通道一
TIM_OCInitStructer.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructer.TIM_OutputState = TIM_OutputState_Enable; /*比较输出使能,决定信号是否通过外部引脚输出。value:0(Disable)、1(Enable)。*/
TIM_OCInitStructer.TIM_OCPolarity = TIM_OCPolarity_High; /*比较输出极性,决定定时器通道有效电平的极性。*/
TIM_OCInitStructer.TIM_Pulse = 900;
TIM_OC1Init(TIM3, &TIM_OCInitStructer);
//Enables or disables the TIMx peripheral Preload register on CCR1.
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);
//PWM通道二
TIM_OCInitStructer.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructer.TIM_OutputState = TIM_OutputState_Enable; /*比较输出使能,决定信号是否通过外部引脚输出。value:0(Disable)、1(Enable)。*/
TIM_OCInitStructer.TIM_OCPolarity = TIM_OCPolarity_High; /*比较输出极性,决定定时器通道有效电平的极性。*/
TIM_OCInitStructer.TIM_Pulse = 900;
TIM_OC2Init(TIM3, &TIM_OCInitStructer);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
//PWM通道三
TIM_OCInitStructer.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructer.TIM_OutputState = TIM_OutputState_Enable; /*比较输出使能,决定信号是否通过外部引脚输出。value:0(Disable)、1(Enable)。*/
TIM_OCInitStructer.TIM_OCPolarity = TIM_OCPolarity_High; /*比较输出极性,决定定时器通道有效电平的极性。*/
TIM_OCInitStructer.TIM_Pulse = 900;
TIM_OC3Init(TIM3, &TIM_OCInitStructer);
TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable);
//PWM通道四
TIM_OCInitStructer.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructer.TIM_OutputState = TIM_OutputState_Enable; /*比较输出使能,决定信号是否通过外部引脚输出。value:0(Disable)、1(Enable)。*/
TIM_OCInitStructer.TIM_OCPolarity = TIM_OCPolarity_High; /*比较输出极性,决定定时器通道有效电平的极性。*/
TIM_OCInitStructer.TIM_Pulse = 900;
TIM_OC4Init(TIM3, &TIM_OCInitStructer);
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_Cmd(TIM3, ENABLE);
}
//前进
void Go_Forward(void)
{
//Sets the TIMx Capture Compare1 Register value
TIM_SetCompare1(TIM3, 300);
TIM_SetCompare2(TIM3, 900);
TIM_SetCompare3(TIM3, 300);
TIM_SetCompare4(TIM3, 900);
}
//停止
void Stop(void)
{
TIM_SetCompare1(TIM3, 900);
TIM_SetCompare2(TIM3, 900);
TIM_SetCompare3(TIM3, 900);
TIM_SetCompare4(TIM3, 900);
}
//后退
void Go_Back(void)
{
TIM_SetCompare1(TIM3, 900);
TIM_SetCompare2(TIM3, 300);
TIM_SetCompare3(TIM3, 900);
TIM_SetCompare4(TIM3, 300);
}
//左转
void Turn_Left(void)
{
TIM_SetCompare1(TIM3, 900);
TIM_SetCompare2(TIM3, 350);
TIM_SetCompare3(TIM3, 350);
TIM_SetCompare4(TIM3, 900);
}
//右转
void Turn_Right(void)
{
TIM_SetCompare1(TIM3, 350);
TIM_SetCompare2(TIM3, 900);
TIM_SetCompare3(TIM3, 900);
TIM_SetCompare4(TIM3, 350);
}
bsp_l2980n.h
#ifndef __L298N_H
#define __L298N_H
#include "stm32f10x.h"
void TIM3_PWM_Init(void);
void Go_Forward(void);
void Go_Back(void);
void Stop(void);
void Turn_Left(void);
void Turn_Right(void);
#endif /*__L298N_H*/
stm32f10x_it.c
#include "stm32f10x_it.h"
#include "bsp_led.h"
#include "bsp_exti.h"
#include "bsp_l298n.h"
//EXTI3_IRQHandler中断服务函数
void INFRAREDAVOID1_IRQHandler(void)
{
if(EXTI_GetITStatus(INFRAREDAVOID1_INT_EXTI_LINE) !=RESET)
{
LED3_R(1);
// Stop() ;
flag1=1;
Turn_Right();
EXTI_ClearITPendingBit(INFRAREDAVOID1_INT_EXTI_LINE);
}
}
//EXTI4_IRQHandler中断服务函数
void INFRAREDAVOID2_IRQHandler(void)
{
if(EXTI_GetITStatus(INFRAREDAVOID2_INT_EXTI_LINE) !=RESET)
{
LED3_R(1);
flag2=1;
// Stop() ;
Turn_Left();
EXTI_ClearITPendingBit(INFRAREDAVOID2_INT_EXTI_LINE);
}
}
main.c
#include "stm32f10x.h"
#include "bsp_led.h"
#include "bsp_exti.h"
#include "bsp_l298n.h"
extern uint16_t flag1;
extern uint16_t flag2;
int main(void)
{
LED_GPIO_Config();
EXTI_INFRAREDAVOID1_Config();
EXTI_INFRAREDAVOID2_Config();
TIM3_PWM_Init();
Go_Forward();
while(1)
{
if(flag1 == 1)
{
if(GPIO_ReadInputDataBit(INFRAREDAVOID1_INT_GPIO_PORT,INFRAREDAVOID1_INT_GPIO_PIN) == 1) //外部中断跳回0
{
flag1 = 0;
LED3_R(0);
Go_Forward();
}
}
if(flag2 == 1)
{
if(GPIO_ReadInputDataBit(INFRAREDAVOID2_INT_GPIO_PORT,INFRAREDAVOID2_INT_GPIO_PIN) == 1) //外部中断跳回0
{
flag2 = 0;
LED3_R(0);
Go_Forward();
}
}
}
}
以上就是本项目需要手写的全部代码了,觉得不错的记得一键三连哦!有问题也可私聊我哦文章来源地址https://www.toymoban.com/news/detail-816172.html
到了这里,关于《基于STM32的红外避障小车》的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!







![[STM32F103C8T6]基于stm32的循迹,跟随,避障智能小车](https://imgs.yssmx.com/Uploads/2024/02/533808-1.png)



