项目成果
成功实现LED灯的呼吸效果,先由暗到亮,再由亮到暗,以此循环往复。
成果视频
VID20240116160256
代码讲解
因为,PWM部分是挂靠在定时器里面的,所以代码必须要先初始化定时器,当然初始化定时器就可以直接用之前的定时器初始化,这里不再需要中断NVIC模块,所以可以直接去掉。
定时器初始化代码
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
//初始化定时器的外部时钟,以便让STM32操控定时器
TIM_InternalClockConfig(TIM2);//开启内部时钟,相当于让定时器自己组一个系统
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
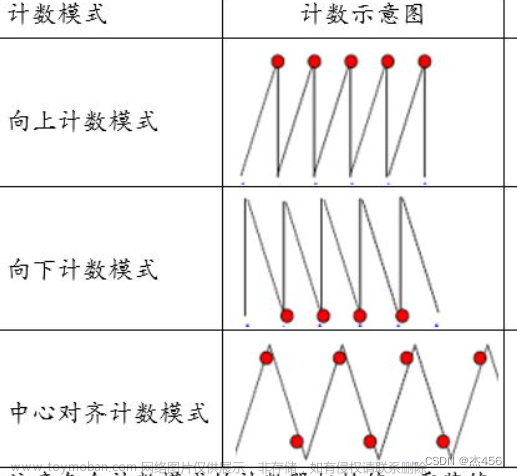
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period=100-1; //CNT
TIM_TimeBaseInitStructure.TIM_Prescaler=720-1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);
//初始化定时器结构体变量
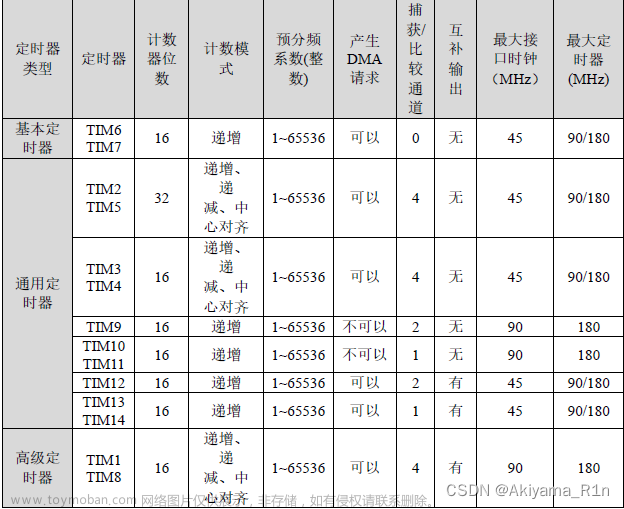
TIM_Cmd(TIM2,ENABLE);//定时器使能定时器模块初始化完成后,就开始编写PWM模块,这里是输出比较,所以选用OC1初始化模块,这个输出输入比较口,是根据官方的引脚说明来的,如下图。
其中,默认引脚复用功能表示该引脚集成了多个功能,既是这个外设的控制,又是那个外设的控制。而重定义功能表示如果该引脚的引脚复用冲突的时候,就可以找到某一个功能的映射引脚,(就是说这个功能不仅在PA0上可以使用,也可以在PA3上可以使用,相当于是放了一个保险)。

定时器的OC输出捕获初始化
所谓的OC输出捕获,就是定时器中产生PWM的一个功能。所以,为了实现操控占空比,就要先给OC初始化,这里选用的是定时器TIM2的第一线路,所以是OC1。选择TIM_OC1Init初始化函数。这不过这个函数是所有时钟均覆盖使用的,所以其结构化也涉及到了高级定时器的配置,如下图:

足足定义了9个变量,但其中大部分是针对高级定时器的,而我们只需要使用通用定时器即可,所以我们在这里有两种选择:
第一种:不管高级定时器的配置,我需要哪一个就定义哪一个,不需要的就不配置。
在本实验中,需要配置的通用定时器参数仅有下面四个:
TIM_OCInitTypeDef TIM_OCInitStruct;
TIM_OCStructInit(&TIM_OCInitStruct);
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High;
TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_Pulse=50;
TIM_OC1Init(TIM2,&TIM_OCInitStruct);第二种:给每一个参数都设置一个初始值,让其也可以适用于高级定时器。
这需要用到一个函数TIM_OCStructInit


就是让这个函数帮我们设置一个初始值,然后,我们再根据自己的需求对具体的参数进行修改。
GPIO引脚定义
OC1初始化完成之后,就开始定义LED引脚,但是引脚必须设置成复用推挽输出因为普通的推挽输出只针对于普通引脚,不针对定时器,而复用推挽输出是针对定时器的。
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//初始化时钟
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//初始化GPIO的结构体变量设置输出捕获寄存器的值
这里需要用到一个函数。


1,2,3,4分别对应四个通道,而在本次项目中我们使用的通道是1,所以我们直接用TIM_SetCompare1函数。其中,前一个参数是定时器几,后一个参数是输入的寄存器值。代码如下:
void PWM_SetCompare1(uint16_t campare)
{
TIM_SetCompare1(TIM2,campare);
}主函数代码编写
在主函数里面主要是设置输出寄存器的值来间接控制占空比,用一个简单的for循环就可以实现功能。
for(i=0;i<=100;i++)
{
PWM_SetCompare1(i);
Delay_ms(10);
}
for(i=0;i<=100;i++)
{
PWM_SetCompare1(100-i);
Delay_ms(10);
}第一个for是占空比从0到100,第二个for是占空比从100减到0.
代码展示
main.c
#include "stm32f10x.h" // Device header
#include "pwm.h"
uint16_t i;
int main(void)
{
OLED_Init();
PWM_Init();
while (1)
{
for(i=0;i<=100;i++)
{
PWM_SetCompare1(i);
Delay_ms(10);
}
for(i=0;i<=100;i++)
{
PWM_SetCompare1(100-i);
Delay_ms(10);
}
}}
PWM.c
#include "stm32f10x.h" // Device header
#include "pwm.h"
uint16_t campare;
void PWM_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_InternalClockConfig(TIM2);//开启内部时钟
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period=100-1;
TIM_TimeBaseInitStructure.TIM_Prescaler=720-1;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);
TIM_Cmd(TIM2,ENABLE);
TIM_OCInitTypeDef TIM_OCInitStruct;
TIM_OCStructInit(&TIM_OCInitStruct);
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High;
TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_Pulse=50;
TIM_OC1Init(TIM2,&TIM_OCInitStruct);}
void PWM_SetCompare1(uint16_t campare)
{
TIM_SetCompare1(TIM2,campare);
}
PWM.h
#ifndef __PWM_H
#define __PWM_H
void PWM_Init(void);
void PWM_SetCompare1(uint16_t campare);#endif
文章来源:https://www.toymoban.com/news/detail-817017.html
感谢大家的支持!文章来源地址https://www.toymoban.com/news/detail-817017.html
到了这里,关于STM32自学历程——PWM呼吸灯的实现(下)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!