PWM驱动初始化代码

使能定时器二时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
设置定时器时钟源
TIM_InternalClockConfig(TIM2);
配置定时器二的时基单元
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_TimeBaseInitStruct.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitStruct.TIM_Period=100-1; //ARR寄存器的值
TIM_TimeBaseInitStruct.TIM_Prescaler=720-1; //预分频寄存器的值
TIM_TimeBaseInitStruct.TIM_RepetitionCounter=0;//高级寄存器才有
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct);
初始化定时器二的一二三通道引脚,使用复用推挽输出模式
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_3;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
配置定时器输出比较寄存器
TIM_OCInitTypeDef TIM_OCInitStruct;
TIM_OCStructInit(&TIM_OCInitStruct); //对OC结构体进行一个默认的初始化
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM1;//设置为OC模式为PWM1模式
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High;//设置为高电平有效,即不翻转电平
TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable;//输出使能
TIM_OCInitStruct.TIM_Pulse=10;
TIM_OC1Init(TIM2,&TIM_OCInitStruct);
TIM_OC2Init(TIM2,&TIM_OCInitStruct);
TIM_OC3Init(TIM2,&TIM_OCInitStruct);
使能定时器二文章来源:https://www.toymoban.com/news/detail-817059.html
TIM_Cmd(TIM2,ENABLE);
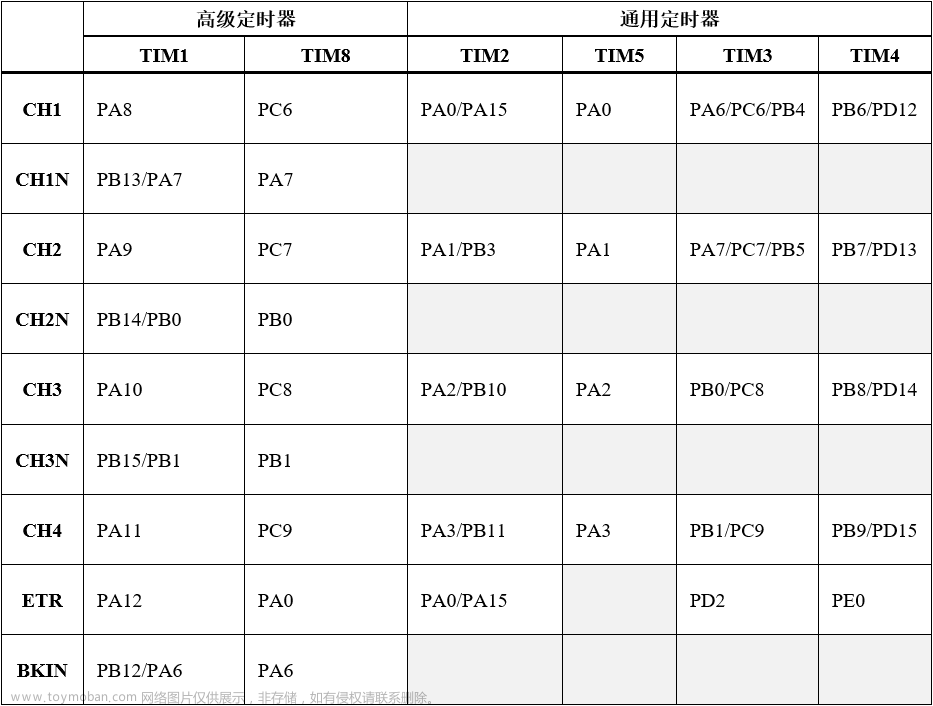
TIM2 引脚重映射功能
//引脚重映射,由于PA15也可以作为TIM2通道0的输出口,所以可以将引脚映射到15号引脚上
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2,ENABLE);
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);
 文章来源地址https://www.toymoban.com/news/detail-817059.html
文章来源地址https://www.toymoban.com/news/detail-817059.html
到了这里,关于STM32标准库开发——PWM驱动代码的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!