摘要
近年来,由于种植体的高成功率和美观优势,对种植体的需求激增。
然而,由于牙齿结构的复杂性和牙齿脱落模式的可变性,准确预测缺失牙齿的精确数字种植计划仍然是一个挑战。本研究提出了一种新的框架,用于准确预测不同模式的缺牙,促进数字化种植计划。提出的框架首先估计健康受试者的CBCT图像重建的牙齿网格模型数据集之间的点对点对应关系。随后,为每种牙齿类型构建齿字典,并基于建立的点对点对应关系对其位置和形状信息进行编码。为了在给定的牙齿网格模型中预测缺失的牙齿,通过使用相应的牙齿字典稀疏表示缺失牙齿的相邻牙齿来学习稀疏系数。然后将这些系数应用到缺失牙齿的字典中,以生成对牙齿位置和形状的准确预测。真实受试者的评估结果表明,该框架对单个缺失牙的预测平均预测误差为1.04mm,对14个缺失牙的预测平均预测误差为1.33mm,证明了该框架能够准确预测不同模式的缺失牙。通过准确预测缺失的牙齿,牙科专业人员可以改进种植牙的计划和放置,从而为接受种植牙手术的患者带来更好的美观和功能结果。
1 介绍
由于其高成功率和美观性,种植牙作为一种可靠的修复缺牙的解决方案已经获得了显著的普及[1,2]。它包括通过手术将人工牙根植入颌骨,为替代牙齿提供稳定的基础[3]。种植牙的详细工作流程包括以下几个步骤:最初的咨询和检查,术前成像如CBCT扫描,种植牙计划,最后种植体与假牙修复[4]。
值得注意的是,种植体规划在确保种植体放置的准确性和成功方面起着至关重要的作用[5]。随着牙科成像和计算机辅助设计(CAD)技术的进步,种植牙规划已经转变为数字化过程,提供了更高的精度、效率和可预测的结果[6]。数字化种植计划的过程通常包括获取高质量的3D成像,在专门的软件中处理图像,根据患者的解剖结构和治疗目标进行虚拟牙齿定位,并创建虚拟模型以可视化最终结果[7]。此外,数字种植计划系统使牙医能够在虚拟环境中优化种植体的位置和方向,确保患者获得最佳结果。
数字化种植体规划的关键步骤是虚拟牙齿定位,即使用计算机辅助设计(CAD)软件虚拟规划和定位牙种植体[8]。这一步骤使牙医能够确定种植体放置的最佳位置、角度和深度,从而实现功能和外观自然的牙齿替换[9]。在目前的临床实践中,牙医通常使用专门的软件在数字种植计划中手动执行虚拟牙齿定位,该软件允许他们根据患者的牙齿扫描操作虚拟牙齿模型[10,11]。然而,这种手工过程严重依赖于牙医在数字种植计划方面的经验和专业知识,通常需要根据每个患者独特的口腔解剖结构进行反复试验,以实现所需的虚拟牙齿定位。因此,人工虚拟牙齿定位费时费力,需要仔细分析和操作虚拟牙齿模型以达到最佳位置和美观。这可能会增加总体治疗计划时间,并需要额外的努力和资源。
准确预测缺牙的位置和形状可以为虚拟牙齿定位提供参考,使牙医能够以更高的效率达到最佳效果[12]。然而**,由于牙齿结构的复杂性和牙齿脱落模式的可变性,准确预测缺失的牙齿仍然是一个挑战**。具体来说,牙齿的结构本质上是复杂的,每颗牙齿都具有独特的形状和位置,个体之间可能存在差异[13]。此外,牙齿脱落的模式差异很大,从单个缺失牙齿到多个不同位置和方向的缺失牙齿[14]。以前,很少有人努力解决准确预测缺失牙齿的位置和形状的挑战。Part et al 提出了一种基于深度学习的方法来检测全景放射图像中缺失牙齿的区域,以辅助种植牙的放置计划[15]。Bayrakdar等人开发了一个框架,根据邻近牙齿的位置和周围颌骨结构来确定缺失牙齿的定位[12]。然而,这些方法不能直接预测缺牙的位置和三维形状,从而限制了它们在种植体规划中的应用。因此,在数字化种植规划中,迫切需要一种更可靠、更准确的方法来预测缺牙的位置和形状。
在这项研究中,我们引入了一种新的框架,旨在准确预测不同模式缺失牙齿的位置和形状,从而促进精确的数字种植计划。我们的框架从估计健康受试者的锥形束计算机断层扫描(CBCT)图像重建的牙齿网格模型数据集之间的点对点对应开始。然后,为每种齿型构建齿字典,根据建立的点对点对应关系对齿的位置和形状信息进行编码。通过使用牙齿字典稀疏表示邻近的牙齿,学习一组稀疏系数来预测缺失的牙齿。然后将这些系数应用到缺失牙齿的字典中,以生成对牙齿位置和形状的准确预测。该框架基于相邻牙齿预测缺失牙齿的能力,可以准确预测各种类型的牙齿缺失。这种设计为不同的临床场景提供了灵活性和适应性,使其成为牙科医生在种植计划过程中处理各种牙齿脱落病例的宝贵工具。本文的主要贡献如下:(1)基于健康受试者的CBCT图像数据集,我们提出了一个新的框架,可以准确预测缺牙,用于精确的数字种植计划。(2)该框架利用剩余相邻牙齿的稀疏表示,以各种模式准确预测缺失牙齿。(3)本文提出的框架在实际患者身上进行了评估,增加了研究结果的实用性和适用性。结果验证了它的潜力,作为一个有价值的工具,牙科医生在提高数字种植规划的准确性和效率。
本文的其余部分组织如下。第2节描述了研究数据和提出的方法。我们提出的各种模式缺失牙齿预测框架的评估结果在第3节中提出。最后在第四节对本文进行了讨论和总结
2 方法

所提出的准确预测缺牙的框架如图1所示。首先,我们估计数据集中来自不同主题的牙齿网格模型之间的点对点对应关系。这是通过利用作为参考的无偏见牙科模板来实现的[13]。接下来,我们为数据集中存在的每种牙齿类型构建一个字典。创建这些字典是为了对各自牙齿的位置和形状进行编码。他们捕捉数据集中观察到的牙齿的特征和变化。为了在给定的牙齿网格模型中预测缺失的牙齿,我们采用了一种基于稀疏学习的方法,使用相应的牙齿字典来表示相邻的牙齿,从而得到一组稀疏系数。最后,我们将获得的系数应用于缺失牙齿类型特定的字典中,对缺失牙齿产生准确的预测。
2.1 数据及预处理
在这项研究中,从我们的数字档案中选择了133名健康受试者的锥束计算机断层扫描(CBCT)图像。这些图像是使用Planmeca牙科CBCT扫描仪获得的。在数据选择过程中,排除严重错牙或缺牙的受试者。此外,本研究并未考虑第三磨牙。所选受试者为华裔,年龄从18岁到60岁不等。
对数据进行预处理,重建牙网模型。
- 首先,采用基于全自动深度学习的牙齿分割方法[16]从CBCT图像中分割牙齿。
- 接下来,采用基于牙图集的牙齿标记方法[13]对分割后的牙齿进行标记。
- 最后,根据标记好的牙齿分割图像重建牙齿网格模型。这个重建步骤允许以三维网格格式表示牙齿,这对我们框架内的后续分析和预测至关重要。
2.2 齿字典结构
为每一种类型的牙齿构建字典,有必要估计该类型牙齿之间的点对点对应关系。这是通过利用[13]中开发的无偏牙模板来实现的。无偏牙模板提供了典型牙齿形状和位置的总体平均表示,同时在总体中保持较高的跨个体有效性,从而提高了点对应估计的准确性[17]。点对应的估计包括以下步骤:
[13] L. Ma, J. Zhang, K. Deng, P. Xue, Z. Cui, Y. Fang,M. Tang, Y. Zhao, M. Zhu, Z. Ding, et al., “Construction of unbiased dental template and parametric dental model for precision digital dentistry,” arXiv preprint arXiv:2304.03556, 2023.
- 刚性对齐:最初,由CBCT图像导出的牙齿网格模型与无偏牙模板进行刚性对齐。这种对齐确保了牙齿网格模型的一致定位和方向。
- 非刚性变形:接下来,牙齿模板中的每颗牙齿进行非刚性变形,以匹配对齐后的牙齿网格模型中对应的牙齿。这种变形是使用相干点漂移(CPD)算法完成的[18]。CPD算法有效捕获特定于每个牙齿的形状变化和变形,实现精确的点对应。
- 最近点搜索:对于变形齿形中的每个点,识别出其目标齿形中最近的点。这个过程建立了一个严格的点对点对应于相应的齿模板的齿形。
刚性对齐:在医学图像处理中,刚性对齐通常是指对图像进行平移、旋转和缩放等操作,使得它们在某种程度上保持位置关系。这种对齐方式用于使图像或体积的特定区域或结构在多个样本中具有一致的位置和方向。
非刚性变形:非刚性变形通常指的是对图像或体积进行一些弯曲、弯折或扭曲的操作,以适应不规则形状或对齐不完美的结构。这在医学图像处理中常常用于对付不同患者之间的解剖差异。
相干点漂移(CPD):“相干点漂移” 这个术语在医学图像处理中通常指的是由于非刚性变形导致图像中的同一结构或特征在不同图像之间位置的改变。这可能是由于不同患者之间的解剖结构差异、姿势差异或其他因素引起的。
通过这些步骤,我们可以准确地估计出牙齿网格模型中每种类型牙齿的严格点对点对应关系。
在成人的牙齿中,不包括第三磨牙,通常有28颗牙齿。在这项研究中,我们将每颗牙齿作为一个单独的类型,从而得到28种不同的牙齿类型。对于每种牙齿类型,我们基于先前估计的点对点对应构造一个字典。具体来说,我们将研究数据集中所有第i齿型对应点的坐标(x, y, z)变换为3Ti×N矩阵。其中,Ti表示第i个齿型中的点数,N表示用于构建字典的主题数。得到的矩阵表示为Di,表示第i个齿类型的字典。它是一个3Ti×N矩阵,其中每一列对应于一个主题对应点的坐标(x, y, z),每三行表示数据集中所有主题的相同对应点。按照这个过程,我们总共构建了28个牙齿字典,记为(D1, D2,…, D28),涵盖了牙齿网格模型中存在的所有牙齿类型
2.3 邻牙测定
给定缺牙的牙网模型(M1, M2,…, Mk),我们根据相邻牙齿的位置和形状来预测缺失的牙齿(A1, A2,…,Ah)。其中,k表示缺失牙齿的数量,h表示相邻牙齿的数量。为了处理各种类型的缺失牙齿,我们开发了一种有效的方法来确定用于预测的相邻牙齿。具体来说,我们将28颗人类牙齿排列成2×14颗牙齿基质,如图2所示。
根据缺失牙齿在牙齿矩阵中的位置,可以推导出缺失牙齿的列索引范围,记为(CRmin, CRmax)。这个范围提供了牙齿基质中缺失牙齿相对位置的信息。因此,我们通过考虑(CRmin t, CRmax + t)列范围内的现有牙齿来确定相邻牙齿进行预测,其中t为1。这些相邻的牙齿在准确预测缺牙方面起着至关重要的作用。在CRmin t为0的情况下,表明所需的相邻牙齿超出了牙齿基质的左侧边界(第二磨牙17和47),我们确定在列范围(CRmin t + 14,14)和(1,CRmax + t)之间的相邻牙齿。
这种方法利用牙齿基质(CRmin t+ 14,14)的另一侧的牙齿来提高预测的准确性,特别是对缺失的磨牙。同理,当CRmax +t > 14时,我们将相邻齿确定为(CRmin t,14)和(1,CRmax +t 14)列范围之间的齿。这解释了相邻牙齿延伸到牙齿基质右边界以外的情况。该框架根据列索引范围考虑合适的邻牙,可以准确预测不同模式的缺牙。
2.4 迭代缺牙预测
为了从相邻牙齿中准确预测缺牙的位置和形状,提出了一种基于迭代稀疏学习的缺牙预测方法。该方法包括以下步骤:
- 首先,我们依靠剩余牙齿将牙齿网格模型与无偏牙模板严格对齐。注意,与缺失牙齿对应的牙齿也从牙齿模板中移除。
- 接下来,我们估计对齐牙齿网格模型中每颗牙齿与牙齿模板中对应牙齿之间的点对点对应关系。
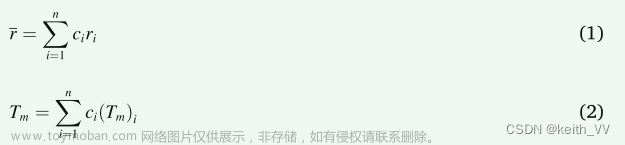
- 进一步,稀疏表示相邻牙齿Aad j = (A1;A2;…;Ah)使用相邻牙齿的组合牙齿字典Dad j = (DA1;DA2;…;DAh),通过求解以下最小化问题[19,20]:
 ,其中C -表示在稀疏表示中估计的系数。ε表示容错。
,其中C -表示在稀疏表示中估计的系数。ε表示容错。 - 我们用下面的公式预测缺失牙齿的形状Mi:
 (2)其中DMi是缺失牙齿Mi的字典。
(2)其中DMi是缺失牙齿Mi的字典。 - 为了改进牙齿预测,我们将合并牙齿预测的牙齿网格模型严格对齐到无偏牙齿模板上。然后,我们重复步骤3和4,进一步提高牙齿预测的准确性。
这些步骤(即步骤3、步骤4和步骤5)迭代执行,直到缺失牙齿的预测误差收敛。这一迭代过程有助于逐步减少由于缺失牙齿的牙网模型与无偏牙模板之间初始刚性对准的配准误差所导致的预测误差。
3 实验与结果
3.1 实验装置
我们进行了实验来评估所提出的预测缺牙方法的有效性。从研究数据集中随机抽取100名受试者构建牙齿词典,其余33名受试者进行测试。在这个实现中,我们设置t为1来确定相邻的牙齿。
我们重复了三次迭代牙齿预测过程来完善牙齿预测。为了评估该方法的性能,我们对测试结果进行了定性和定量评估。为了进行定性评价,我们直观地将预测的牙齿与相应的真牙进行了比较。
此外,我们还通过估计牙齿预测误差进行了定量评价。预测误差的计算方法是将预测牙齿中的点与真牙中对应点之间的点距离取平均值。此外,我们通过首先将预测的牙齿与它们的地面真值严格对齐,然后测量它们之间的点云距离来估计预测牙齿的形状误差[21]。
通过进行这些评估,我们能够评估预测牙齿的视觉质量和定量准确性。
3.2 单颗缺牙预测结果
我们首先进行了实验来评估我们提出的方法对单个缺牙预测的有效性。对于每个实验,我们从测试集中的每个牙齿网格模型中移除一颗牙齿,并利用我们的方法预测移除(缺失)的牙齿。这导致了总共28个实验来预测所有类型的牙齿。
图3显示了预测的牙齿(红色)和相应的真实值(蓝色)之间的视觉比较。我们选择了7种类型的牙齿,具体从第11到17个牙齿进行视觉比较,并随机选择两种不同的病例。为了便于清晰的比较,我们还将预测的牙齿与它们的真实值叠加在一起,并在牙齿模型中与剩余的牙齿(绿色)一起显示。
图4给出了不同类型预测牙齿的平均预测误差和标准差。平均预测误差最小为0.88mm(第36齿),最大为1.26mm(第37齿)。所有牙齿的平均预测误差为1.04mm。表1报告了不同类型牙齿的估计形状误差。最大形状误差为0.94mm(第27齿),最小形状误差为0.63mm(第31齿和第41齿)。这些结果证明了我们提出的方法对不同类型缺牙的准确预测能力。此外,值得注意的是,第二磨牙(17号牙、27号牙、37号牙和47号牙)的预测误差比其他牙类型略大。这可能是由于第二磨牙与其他牙齿不同,只有一侧有相邻的牙齿(见图2)。
3.3 多颗缺牙预测结果


我们进一步进行了实验来评估我们的方法在多颗缺牙预测上的性能。我们使用测试数据集模拟了多个牙齿缺失的各种场景。具体来说,我们模拟了同一排缺牙,从2颗缺牙到7颗缺牙不等。此外,我们模拟缺失的牙齿在上下牙排。
表2为同一排多颗缺牙的预测误差,表3为不同排多颗缺牙的预测误差。结果表明,该方法可以准确预测多颗缺失牙,甚至可以预测多达14颗缺失牙的不同模式。具体来说,对14颗缺牙的预测平均误差为1.33mm,说明我们的框架在处理大量缺牙时是有效的。然而,重要的是要注意,预测误差往往随着缺牙数量的增加而增加。这一观察结果与我们的预期一致,因为用于预测的相邻牙齿与缺失牙齿的距离越来越远,导致它们之间的关系越来越弱,从而导致更高的预测误差。图5显示了预测的多颗缺失牙齿与相应的真牙之间的视觉比较。这些可视化提供了进一步了解我们在各种模式下预测的准确性。
4 讨论与结论
在本文中,我们提出了一个新的框架,以准确预测缺牙的位置和形状的种植牙计划。我们的方法利用邻近牙齿的信息来预测缺失的牙齿,利用基于从正常受试者数据集构建的牙齿字典的迭代稀疏学习方法。实验结果表明,该框架在预测缺牙位置和形状方面具有较高的准确性。牙齿位置的准确预测是至关重要的,因为它允许牙医在种植体放置过程中提高牙齿定位的精度。此外,对牙齿形状的准确预测使牙医能够实现美观的牙齿植入物,使其与患者的天然牙齿无缝融合。我们提出的框架的一个重要方面是它能够解决与不同模式的多个缺失牙齿相关的挑战。通过利用相邻牙齿的信息,我们的框架是专门为处理多颗牙齿缺失的情况而设计的,无论它们的排列或位置如何。多齿缺失预测的实验结果进一步验证了该框架的有效性。此外,我们的框架将其适用性扩展到单排缺失牙齿之外,因为它成功地预测了上下牙齿排中的多个缺失牙齿。这种能力增强了我们的框架的多功能性和实用性,适用于广泛的牙科种植场景。本研究的临床意义在于其可能改善牙科治疗计划和患者护理。通过在三维牙齿网格模型中准确预测缺失的牙齿,可以实现几个好处。首先,对缺失牙齿的准确预测可以让牙医和正畸医生更好地计划牙科治疗,如正畸手术、种植牙或修复干预。它提供了关于缺失牙齿的空间排列和位置的宝贵信息,使更精确的治疗策略和结果成为可能。其次,缺牙会对患者的外表和口腔功能产生重大影响。通过准确预测缺牙,牙科专业人员可以制定全面的治疗计划,解决患者牙齿的美学和功能方面的问题。这可以改善审美、语言、咀嚼能力和整体口腔健康。第三,传统的预测牙齿缺失的方法通常需要大量的手工工作和耗时的程序。使用稀疏学习的3D方法提供了一种更有效和自动化的解决方案,有可能减少治疗计划所需的时间和精力。这可以为牙科医生和患者节省成本。最后但并非最不重要的是,预测不同位置和不同数量的牙齿缺失的能力可以为患者提供更个性化的护理方法。治疗计划可以根据每个人的具体需要量身定制,考虑到他们独特的牙齿特征和要求。这种个性化的方法可以提高患者的满意度和治疗效果。
虽然我们提出的框架在预测缺失牙齿的位置和形状方面显示出有希望的结果,但应该承认某些局限性。首先,我们的框架在很大程度上依赖于相邻牙齿提供的位置和形状信息来预测缺失的牙齿。因此,邻近牙齿的信息不准确或缺失可能会影响预测的准确性。其次,在我们的框架中使用的牙齿词典是从正常主题的数据集构建的。当将框架应用于与数据集偏离的具有独特牙齿特征的患者时,这可能会引入限制。这些独特的特征包括牙齿大小、形状、排列或牙齿异常或异常的存在。
未来的研究和开发有几种方法可以进一步提高我们方法的准确性和适用性。首先,为了提高通用性,未来的工作可能涉及扩展数据集,以包括更多样化的牙齿特征,包括牙齿形态、大小和形状的变化。文章来源:https://www.toymoban.com/news/detail-817423.html
这将允许更好地代表人口,并提高框架的性能,以预测更广泛的患者缺牙。其次,我们的框架主要关注牙齿的结构,并假设周围的骨骼和软组织是完整的,适合种植牙。外部因素,如骨质量、牙龈健康和患者的具体情况可能会影响最终结果,应与我们在未来研究中的预测结合考虑。第三,未来的研究可以探索整合患者特定数据,例如来自口腔内扫描和患者病史的信息,以提高预测的准确性和个性化。这可以使一个更有针对性的方法来种植牙计划,考虑到个别病人的特点。文章来源地址https://www.toymoban.com/news/detail-817423.html
到了这里,关于Accurate 3D Prediction of Missing Teeth in Diverse Patterns for Precise Dental Implant Planning的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!





![[论文笔记] SurroundOcc: Multi-Camera 3D Occupancy Prediction for Autonomous Driving](https://imgs.yssmx.com/Uploads/2024/02/765392-1.png)