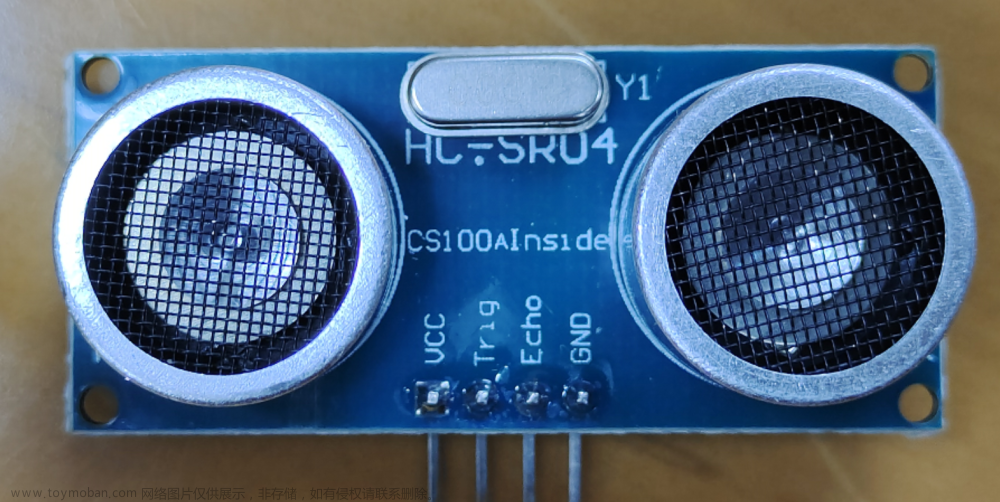
一.超声波图片
测量距离:2cm——400cm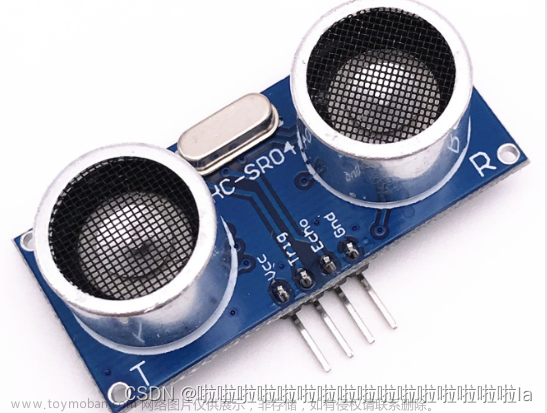
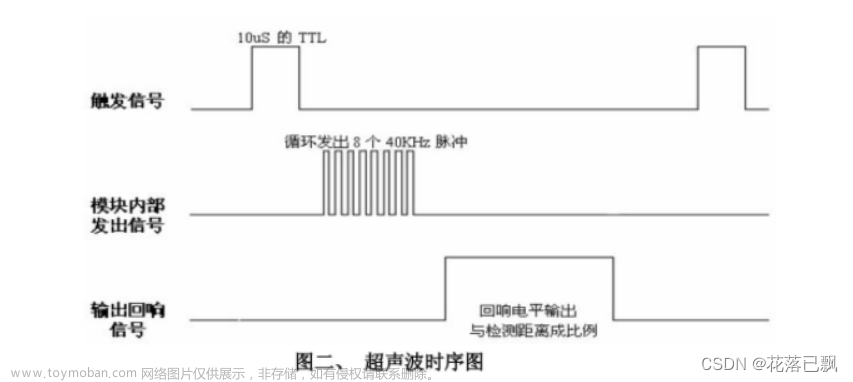
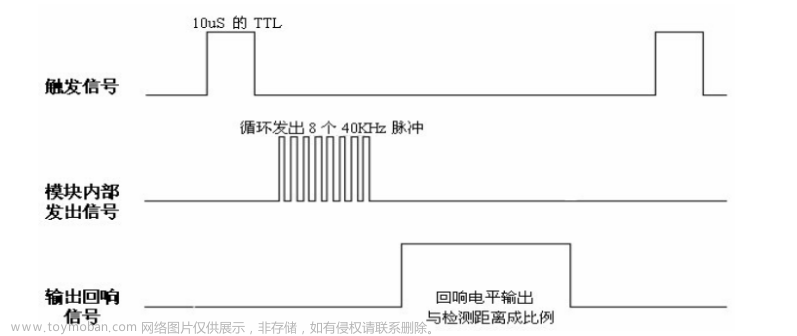
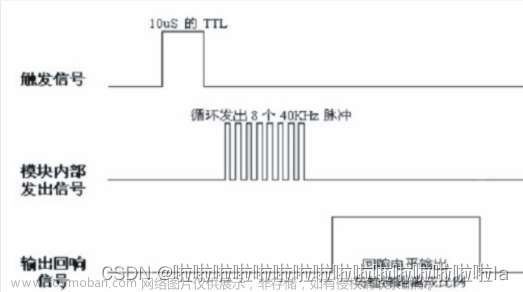
二.时序图
(1).以下时序图要先提供一个至少10us的脉冲触发信号,告诉单片机我准备好了,然后该超声波模块内部将发出8个40Khz的的周期电平并检测回波,这时候是超声波模块发送的波,检测能不能发送超声波,与单片机无关,所以代码就不用写写这里的代码,然后一旦检测到有回波信号后则向单片机输出回响信号,高电平持续的时间就是超声波发出波到返回的时间。
(2).以超声波为主体,Trig是接受触发信号RX,Echo是发送超声波TX。
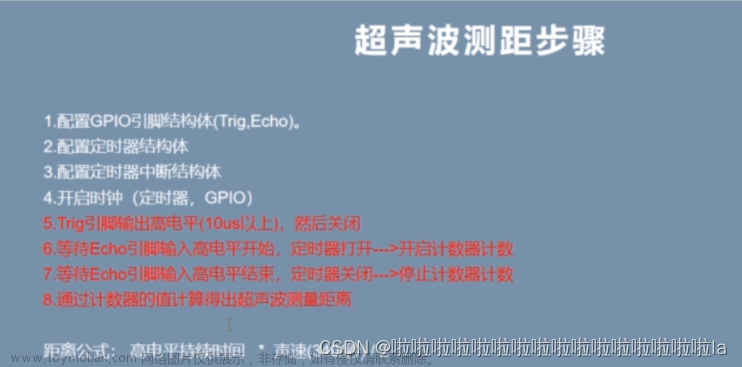
三.超声波流程
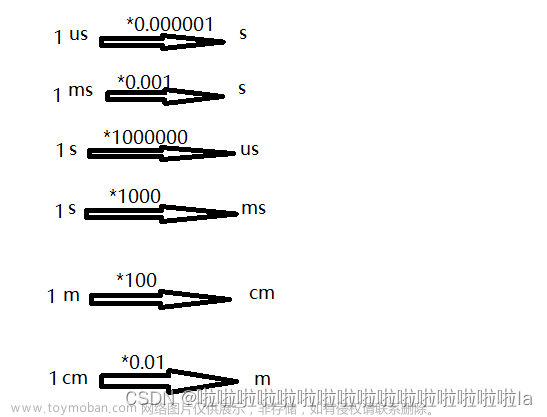
四.单位换算
五.取余计算
六.换算距离
从下图手册可知,我们距离s可以等于时间微妙us/58,单位是cm,所以把定时器设置成1ms,在然后在定时器中断里面设置一个标志位,进去一次就是1ms,然后标志位在乘于一个1000,就是把1ms换算成1000us了,然后这个是来回的时间,但是要注意超声波回来的最后一刻,定时器没有达到ARR自动重装值的话,就结束了,这个也要算进去时间,就是TIM_GetCounter,然后t得到之后,t需要/2,因为是来回的时间,然后因为声速是340m/s,需要把us换成s,就是t * 0.00001/2=t/2000000,然后340m/s需要换成cm,也就是340 * 100,所以s=t/2000000 * 340 * 100,最后换算就是t/58。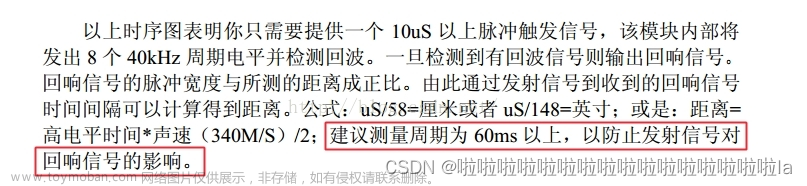
七.超声波代码
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Buzzer.h"
#include "OLED.h"
float distance;
int main()
{
Ultrasonic_Init();
OLED_Init();
OLED_ShowString(1,1,"distance");
OLED_ShowString(2,1,"000.000cm");
while(1)
{
distance=Ultrasonic_Getdistance();
OLED_ShowNum(2,1,distance,3);//最多3位,因为最高测量4m,也就是400cm
OLED_ShowNum(2,5,(uint16_t)(distance*1000)%1000,3);//小数也是3位,然后这里OLED_ShowNum是只显示整数,所以需要把float类型强转int类型
Delay_ms(66);//周期至少60ms
}
}
Buzzer.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Buzzer.h"
uint32_t Ultrasonic_Num=0; // 计数值
void Ultrasonic_Port()
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
//GPIOA0--RX--Trig
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
//GPIOA1---TX--Echo
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA,&GPIO_InitStructure);
}
void Ultrasonic_TIM(uint16_t arr,uint16_t psc)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
TIM_TimeBaseInitTypeDef TIM_InitStructure;
TIM_InitStructure.TIM_Period = arr-1;
TIM_InitStructure.TIM_Prescaler = psc-1;
TIM_InitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_InitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_InitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM3,&TIM_InitStructure);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 8;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE);
TIM_Cmd(TIM3, DISABLE);
}
void Ultrasonic_Init()
{
Ultrasonic_Port();
Ultrasonic_TIM(1000,72);
}
//触发超声波
void Ultrasonic_Start()
{
INC = 1;
Delay_us(12);//Trig给高电平12us
INC = 0;
}
//测量时间
int Ultrasonic_GetTime(void)
{
uint32_t t;
//1ms*1000=1000us,这里化成us
t = Ultrasonic_Num * 1000;
//t=t+TIM_GetCounter(TIM3),意思是:t是上面获取的定时器爆表后的时间,爆表一次就是1000us,也就是ARR为1000时就是1000us,当然如果超声波在下一次计时没有爆表就结束了,
//假如此时CNT=900,那我们假如Ultrasonic_Num=1,就是1000us,然后t=1000+900=1900us
t +=TIM_GetCounter(TIM3);
return t;
}
//测量距离
float Ultrasonic_Getdistance(void)
{
int i =0;
uint32_t t = 0;
float distance = 0;
float sum = 0;
while(i!=5) //五次测量
{
Ultrasonic_Start(); //触发超声波
TIM_SetCounter(TIM3,0);
Ultrasonic_Num = 0; //定时器清0
while(IN0 == 0);
TIM_Cmd(TIM3,ENABLE); //启动定时器
i++;
while(IN0 == 1);
TIM_Cmd(TIM3, DISABLE); //关闭定时器
t = Ultrasonic_GetTime(); //获取时间
distance =(float)t /58; //测量距离
sum += distance; //五次测量总和
}
distance = (sum/5); //取平均值
return distance;
}
void TIM3_IRQHandler(void)//0.001s=1ms
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update) == SET)
{
Ultrasonic_Num++; //计数值+1
}
TIM_ClearITPendingBit(TIM3,TIM_IT_Update);
}
Buzzer.h
#include "stm32f10x.h" // Device header
#include "sys.h"
#ifndef __BUZZER_H
#define __BUZZER_H
#define INC PAout(0)
#define IN0 PAin(1)
void Ultrasonic_Init(void);
float Ultrasonic_Getdistance(void);
#endif
sys.c
sys.h
#ifndef __SYS_H
#define __SYS_H
#include "stm32f10x.h"
//位带操作,实现51类似的GPIO控制功能
//具体实现思想,参考<<CM3权威指南>>第五章(87页~92页).
//IO口操作宏定义
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO口地址映射
#define GPIOA_ODR_Addr (GPIOA_BASE+12) //0x4001080C
#define GPIOB_ODR_Addr (GPIOB_BASE+12) //0x40010C0C
#define GPIOC_ODR_Addr (GPIOC_BASE+12) //0x4001100C
#define GPIOD_ODR_Addr (GPIOD_BASE+12) //0x4001140C
#define GPIOE_ODR_Addr (GPIOE_BASE+12) //0x4001180C
#define GPIOF_ODR_Addr (GPIOF_BASE+12) //0x40011A0C
#define GPIOG_ODR_Addr (GPIOG_BASE+12) //0x40011E0C
#define GPIOA_IDR_Addr (GPIOA_BASE+8) //0x40010808
#define GPIOB_IDR_Addr (GPIOB_BASE+8) //0x40010C08
#define GPIOC_IDR_Addr (GPIOC_BASE+8) //0x40011008
#define GPIOD_IDR_Addr (GPIOD_BASE+8) //0x40011408
#define GPIOE_IDR_Addr (GPIOE_BASE+8) //0x40011808
#define GPIOF_IDR_Addr (GPIOF_BASE+8) //0x40011A08
#define GPIOG_IDR_Addr (GPIOG_BASE+8) //0x40011E08
//IO口操作,只对单一的IO口!
//确保n的值小于16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入
#endif
OLED.c
#include "stm32f10x.h"
#include "OLED_Font.h"
/*引脚配置*/
#define OLED_W_SCL(x) GPIO_WriteBit(GPIOB, GPIO_Pin_12, (BitAction)(x))
#define OLED_W_SDA(x) GPIO_WriteBit(GPIOB, GPIO_Pin_13, (BitAction)(x))
/*引脚初始化*/
void OLED_I2C_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_Init(GPIOB, &GPIO_InitStructure);
OLED_W_SCL(1);
OLED_W_SDA(1);
}
/**
* @brief I2C开始
* @param 无
* @retval 无
*/
void OLED_I2C_Start(void)
{
OLED_W_SDA(1);
OLED_W_SCL(1);
OLED_W_SDA(0);
OLED_W_SCL(0);
}
/**
* @brief I2C停止
* @param 无
* @retval 无
*/
void OLED_I2C_Stop(void)
{
OLED_W_SDA(0);
OLED_W_SCL(1);
OLED_W_SDA(1);
}
/**
* @brief I2C发送一个字节
* @param Byte 要发送的一个字节
* @retval 无
*/
void OLED_I2C_SendByte(uint8_t Byte)
{
uint8_t i;
for (i = 0; i < 8; i++)
{
OLED_W_SDA(Byte & (0x80 >> i));
OLED_W_SCL(1);
OLED_W_SCL(0);
}
OLED_W_SCL(1); //额外的一个时钟,不处理应答信号
OLED_W_SCL(0);
}
/**
* @brief OLED写命令
* @param Command 要写入的命令
* @retval 无
*/
void OLED_WriteCommand(uint8_t Command)
{
OLED_I2C_Start();
OLED_I2C_SendByte(0x78); //从机地址
OLED_I2C_SendByte(0x00); //写命令
OLED_I2C_SendByte(Command);
OLED_I2C_Stop();
}
/**
* @brief OLED写数据
* @param Data 要写入的数据
* @retval 无
*/
void OLED_WriteData(uint8_t Data)
{
OLED_I2C_Start();
OLED_I2C_SendByte(0x78); //从机地址
OLED_I2C_SendByte(0x40); //写数据
OLED_I2C_SendByte(Data);
OLED_I2C_Stop();
}
/**
* @brief OLED设置光标位置
* @param Y 以左上角为原点,向下方向的坐标,范围:0~7
* @param X 以左上角为原点,向右方向的坐标,范围:0~127
* @retval 无
*/
void OLED_SetCursor(uint8_t Y, uint8_t X)
{
OLED_WriteCommand(0xB0 | Y); //设置Y位置
OLED_WriteCommand(0x10 | ((X & 0xF0) >> 4)); //设置X位置高4位
OLED_WriteCommand(0x00 | (X & 0x0F)); //设置X位置低4位
}
/**
* @brief OLED清屏
* @param 无
* @retval 无
*/
void OLED_Clear(void)
{
uint8_t i, j;
for (j = 0; j < 8; j++)
{
OLED_SetCursor(j, 0);
for(i = 0; i < 128; i++)
{
OLED_WriteData(0x00);
}
}
}
/**
* @brief OLED显示一个字符
* @param Line 行位置,范围:1~4
* @param Column 列位置,范围:1~16
* @param Char 要显示的一个字符,范围:ASCII可见字符
* @retval 无
*/
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char)
{
uint8_t i;
OLED_SetCursor((Line - 1) * 2, (Column - 1) * 8); //设置光标位置在上半部分
for (i = 0; i < 8; i++)
{
OLED_WriteData(OLED_F8x16[Char - ' '][i]); //显示上半部分内容
}
OLED_SetCursor((Line - 1) * 2 + 1, (Column - 1) * 8); //设置光标位置在下半部分
for (i = 0; i < 8; i++)
{
OLED_WriteData(OLED_F8x16[Char - ' '][i + 8]); //显示下半部分内容
}
}
/**
* @brief OLED显示字符串
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param String 要显示的字符串,范围:ASCII可见字符
* @retval 无
*/
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i++)
{
OLED_ShowChar(Line, Column + i, String[i]);
}
}
/**
* @brief OLED次方函数
* @retval 返回值等于X的Y次方
*/
uint32_t OLED_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y--)
{
Result *= X;
}
return Result;
}
/**
* @brief OLED显示数字(十进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~4294967295
* @param Length 要显示数字的长度,范围:1~10
* @retval 无
*/
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i, Number / OLED_Pow(10, Length - i - 1) % 10 + '0');
}
}
/**
* @brief OLED显示数字(十进制,带符号数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:-2147483648~2147483647
* @param Length 要显示数字的长度,范围:1~10
* @retval 无
*/
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length)
{
uint8_t i;
uint32_t Number1;
if (Number >= 0)
{
OLED_ShowChar(Line, Column, '+');
Number1 = Number;
}
else
{
OLED_ShowChar(Line, Column, '-');
Number1 = -Number;
}
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i + 1, Number1 / OLED_Pow(10, Length - i - 1) % 10 + '0');
}
}
/**
* @brief OLED显示数字(十六进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~0xFFFFFFFF
* @param Length 要显示数字的长度,范围:1~8
* @retval 无
*/
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i, SingleNumber;
for (i = 0; i < Length; i++)
{
SingleNumber = Number / OLED_Pow(16, Length - i - 1) % 16;
if (SingleNumber < 10)
{
OLED_ShowChar(Line, Column + i, SingleNumber + '0');
}
else
{
OLED_ShowChar(Line, Column + i, SingleNumber - 10 + 'A');
}
}
}
/**
* @brief OLED显示数字(二进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~1111 1111 1111 1111
* @param Length 要显示数字的长度,范围:1~16
* @retval 无
*/
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i, Number / OLED_Pow(2, Length - i - 1) % 2 + '0');
}
}
/**
* @brief OLED初始化
* @param 无
* @retval 无
*/
void OLED_Init(void)
{
uint32_t i, j;
for (i = 0; i < 1000; i++) //上电延时
{
for (j = 0; j < 1000; j++);
}
OLED_I2C_Init(); //端口初始化
OLED_WriteCommand(0xAE); //关闭显示
OLED_WriteCommand(0xD5); //设置显示时钟分频比/振荡器频率
OLED_WriteCommand(0x80);
OLED_WriteCommand(0xA8); //设置多路复用率
OLED_WriteCommand(0x3F);
OLED_WriteCommand(0xD3); //设置显示偏移
OLED_WriteCommand(0x00);
OLED_WriteCommand(0x40); //设置显示开始行
OLED_WriteCommand(0xA1); //设置左右方向,0xA1正常 0xA0左右反置
OLED_WriteCommand(0xC8); //设置上下方向,0xC8正常 0xC0上下反置
OLED_WriteCommand(0xDA); //设置COM引脚硬件配置
OLED_WriteCommand(0x12);
OLED_WriteCommand(0x81); //设置对比度控制
OLED_WriteCommand(0xCF);
OLED_WriteCommand(0xD9); //设置预充电周期
OLED_WriteCommand(0xF1);
OLED_WriteCommand(0xDB); //设置VCOMH取消选择级别
OLED_WriteCommand(0x30);
OLED_WriteCommand(0xA4); //设置整个显示打开/关闭
OLED_WriteCommand(0xA6); //设置正常/倒转显示
OLED_WriteCommand(0x8D); //设置充电泵
OLED_WriteCommand(0x14);
OLED_WriteCommand(0xAF); //开启显示
OLED_Clear(); //OLED清屏
}
OLED.h文章来源:https://www.toymoban.com/news/detail-817642.html
#ifndef __OLED_H
#define __OLED_H
#include "stm32f10x.h" // Device header
void OLED_Init(void);
void OLED_Clear(void);
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char);
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String);
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length);
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
#endif
OLED_Font.h文章来源地址https://www.toymoban.com/news/detail-817642.html
#ifndef __OLED_FONT_H
#define __OLED_FONT_H
#include "stm32f10x.h" // Device header
/*OLED字模库,宽8像素,高16像素*/
const uint8_t OLED_F8x16[][16]=
{
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,// 0
0x00,0x00,0x00,0xF8,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x33,0x30,0x00,0x00,0x00,//! 1
0x00,0x10,0x0C,0x06,0x10,0x0C,0x06,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//" 2
0x40,0xC0,0x78,0x40,0xC0,0x78,0x40,0x00,
0x04,0x3F,0x04,0x04,0x3F,0x04,0x04,0x00,//# 3
0x00,0x70,0x88,0xFC,0x08,0x30,0x00,0x00,
0x00,0x18,0x20,0xFF,0x21,0x1E,0x00,0x00,//$ 4
0xF0,0x08,0xF0,0x00,0xE0,0x18,0x00,0x00,
0x00,0x21,0x1C,0x03,0x1E,0x21,0x1E,0x00,//% 5
0x00,0xF0,0x08,0x88,0x70,0x00,0x00,0x00,
0x1E,0x21,0x23,0x24,0x19,0x27,0x21,0x10,//& 6
0x10,0x16,0x0E,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//' 7
0x00,0x00,0x00,0xE0,0x18,0x04,0x02,0x00,
0x00,0x00,0x00,0x07,0x18,0x20,0x40,0x00,//( 8
0x00,0x02,0x04,0x18,0xE0,0x00,0x00,0x00,
0x00,0x40,0x20,0x18,0x07,0x00,0x00,0x00,//) 9
0x40,0x40,0x80,0xF0,0x80,0x40,0x40,0x00,
0x02,0x02,0x01,0x0F,0x01,0x02,0x02,0x00,//* 10
0x00,0x00,0x00,0xF0,0x00,0x00,0x00,0x00,
0x01,0x01,0x01,0x1F,0x01,0x01,0x01,0x00,//+ 11
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x80,0xB0,0x70,0x00,0x00,0x00,0x00,0x00,//, 12
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x01,0x01,0x01,0x01,0x01,0x01,0x01,//- 13
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x30,0x30,0x00,0x00,0x00,0x00,0x00,//. 14
0x00,0x00,0x00,0x00,0x80,0x60,0x18,0x04,
0x00,0x60,0x18,0x06,0x01,0x00,0x00,0x00,/// 15
0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,
0x00,0x0F,0x10,0x20,0x20,0x10,0x0F,0x00,//0 16
0x00,0x10,0x10,0xF8,0x00,0x00,0x00,0x00,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//1 17
0x00,0x70,0x08,0x08,0x08,0x88,0x70,0x00,
0x00,0x30,0x28,0x24,0x22,0x21,0x30,0x00,//2 18
0x00,0x30,0x08,0x88,0x88,0x48,0x30,0x00,
0x00,0x18,0x20,0x20,0x20,0x11,0x0E,0x00,//3 19
0x00,0x00,0xC0,0x20,0x10,0xF8,0x00,0x00,
0x00,0x07,0x04,0x24,0x24,0x3F,0x24,0x00,//4 20
0x00,0xF8,0x08,0x88,0x88,0x08,0x08,0x00,
0x00,0x19,0x21,0x20,0x20,0x11,0x0E,0x00,//5 21
0x00,0xE0,0x10,0x88,0x88,0x18,0x00,0x00,
0x00,0x0F,0x11,0x20,0x20,0x11,0x0E,0x00,//6 22
0x00,0x38,0x08,0x08,0xC8,0x38,0x08,0x00,
0x00,0x00,0x00,0x3F,0x00,0x00,0x00,0x00,//7 23
0x00,0x70,0x88,0x08,0x08,0x88,0x70,0x00,
0x00,0x1C,0x22,0x21,0x21,0x22,0x1C,0x00,//8 24
0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,
0x00,0x00,0x31,0x22,0x22,0x11,0x0F,0x00,//9 25
0x00,0x00,0x00,0xC0,0xC0,0x00,0x00,0x00,
0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,//: 26
0x00,0x00,0x00,0x80,0x00,0x00,0x00,0x00,
0x00,0x00,0x80,0x60,0x00,0x00,0x00,0x00,//; 27
0x00,0x00,0x80,0x40,0x20,0x10,0x08,0x00,
0x00,0x01,0x02,0x04,0x08,0x10,0x20,0x00,//< 28
0x40,0x40,0x40,0x40,0x40,0x40,0x40,0x00,
0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x00,//= 29
0x00,0x08,0x10,0x20,0x40,0x80,0x00,0x00,
0x00,0x20,0x10,0x08,0x04,0x02,0x01,0x00,//> 30
0x00,0x70,0x48,0x08,0x08,0x08,0xF0,0x00,
0x00,0x00,0x00,0x30,0x36,0x01,0x00,0x00,//? 31
0xC0,0x30,0xC8,0x28,0xE8,0x10,0xE0,0x00,
0x07,0x18,0x27,0x24,0x23,0x14,0x0B,0x00,//@ 32
0x00,0x00,0xC0,0x38,0xE0,0x00,0x00,0x00,
0x20,0x3C,0x23,0x02,0x02,0x27,0x38,0x20,//A 33
0x08,0xF8,0x88,0x88,0x88,0x70,0x00,0x00,
0x20,0x3F,0x20,0x20,0x20,0x11,0x0E,0x00,//B 34
0xC0,0x30,0x08,0x08,0x08,0x08,0x38,0x00,
0x07,0x18,0x20,0x20,0x20,0x10,0x08,0x00,//C 35
0x08,0xF8,0x08,0x08,0x08,0x10,0xE0,0x00,
0x20,0x3F,0x20,0x20,0x20,0x10,0x0F,0x00,//D 36
0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,
0x20,0x3F,0x20,0x20,0x23,0x20,0x18,0x00,//E 37
0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,
0x20,0x3F,0x20,0x00,0x03,0x00,0x00,0x00,//F 38
0xC0,0x30,0x08,0x08,0x08,0x38,0x00,0x00,
0x07,0x18,0x20,0x20,0x22,0x1E,0x02,0x00,//G 39
0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,
0x20,0x3F,0x21,0x01,0x01,0x21,0x3F,0x20,//H 40
0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0x00,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//I 41
0x00,0x00,0x08,0x08,0xF8,0x08,0x08,0x00,
0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,0x00,//J 42
0x08,0xF8,0x88,0xC0,0x28,0x18,0x08,0x00,
0x20,0x3F,0x20,0x01,0x26,0x38,0x20,0x00,//K 43
0x08,0xF8,0x08,0x00,0x00,0x00,0x00,0x00,
0x20,0x3F,0x20,0x20,0x20,0x20,0x30,0x00,//L 44
0x08,0xF8,0xF8,0x00,0xF8,0xF8,0x08,0x00,
0x20,0x3F,0x00,0x3F,0x00,0x3F,0x20,0x00,//M 45
0x08,0xF8,0x30,0xC0,0x00,0x08,0xF8,0x08,
0x20,0x3F,0x20,0x00,0x07,0x18,0x3F,0x00,//N 46
0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,
0x0F,0x10,0x20,0x20,0x20,0x10,0x0F,0x00,//O 47
0x08,0xF8,0x08,0x08,0x08,0x08,0xF0,0x00,
0x20,0x3F,0x21,0x01,0x01,0x01,0x00,0x00,//P 48
0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,
0x0F,0x18,0x24,0x24,0x38,0x50,0x4F,0x00,//Q 49
0x08,0xF8,0x88,0x88,0x88,0x88,0x70,0x00,
0x20,0x3F,0x20,0x00,0x03,0x0C,0x30,0x20,//R 50
0x00,0x70,0x88,0x08,0x08,0x08,0x38,0x00,
0x00,0x38,0x20,0x21,0x21,0x22,0x1C,0x00,//S 51
0x18,0x08,0x08,0xF8,0x08,0x08,0x18,0x00,
0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//T 52
0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,
0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//U 53
0x08,0x78,0x88,0x00,0x00,0xC8,0x38,0x08,
0x00,0x00,0x07,0x38,0x0E,0x01,0x00,0x00,//V 54
0xF8,0x08,0x00,0xF8,0x00,0x08,0xF8,0x00,
0x03,0x3C,0x07,0x00,0x07,0x3C,0x03,0x00,//W 55
0x08,0x18,0x68,0x80,0x80,0x68,0x18,0x08,
0x20,0x30,0x2C,0x03,0x03,0x2C,0x30,0x20,//X 56
0x08,0x38,0xC8,0x00,0xC8,0x38,0x08,0x00,
0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//Y 57
0x10,0x08,0x08,0x08,0xC8,0x38,0x08,0x00,
0x20,0x38,0x26,0x21,0x20,0x20,0x18,0x00,//Z 58
0x00,0x00,0x00,0xFE,0x02,0x02,0x02,0x00,
0x00,0x00,0x00,0x7F,0x40,0x40,0x40,0x00,//[ 59
0x00,0x0C,0x30,0xC0,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x01,0x06,0x38,0xC0,0x00,//\ 60
0x00,0x02,0x02,0x02,0xFE,0x00,0x00,0x00,
0x00,0x40,0x40,0x40,0x7F,0x00,0x00,0x00,//] 61
0x00,0x00,0x04,0x02,0x02,0x02,0x04,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//^ 62
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,//_ 63
0x00,0x02,0x02,0x04,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//` 64
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,
0x00,0x19,0x24,0x22,0x22,0x22,0x3F,0x20,//a 65
0x08,0xF8,0x00,0x80,0x80,0x00,0x00,0x00,
0x00,0x3F,0x11,0x20,0x20,0x11,0x0E,0x00,//b 66
0x00,0x00,0x00,0x80,0x80,0x80,0x00,0x00,
0x00,0x0E,0x11,0x20,0x20,0x20,0x11,0x00,//c 67
0x00,0x00,0x00,0x80,0x80,0x88,0xF8,0x00,
0x00,0x0E,0x11,0x20,0x20,0x10,0x3F,0x20,//d 68
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,
0x00,0x1F,0x22,0x22,0x22,0x22,0x13,0x00,//e 69
0x00,0x80,0x80,0xF0,0x88,0x88,0x88,0x18,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//f 70
0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,
0x00,0x6B,0x94,0x94,0x94,0x93,0x60,0x00,//g 71
0x08,0xF8,0x00,0x80,0x80,0x80,0x00,0x00,
0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//h 72
0x00,0x80,0x98,0x98,0x00,0x00,0x00,0x00,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//i 73
0x00,0x00,0x00,0x80,0x98,0x98,0x00,0x00,
0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,//j 74
0x08,0xF8,0x00,0x00,0x80,0x80,0x80,0x00,
0x20,0x3F,0x24,0x02,0x2D,0x30,0x20,0x00,//k 75
0x00,0x08,0x08,0xF8,0x00,0x00,0x00,0x00,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//l 76
0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x00,
0x20,0x3F,0x20,0x00,0x3F,0x20,0x00,0x3F,//m 77
0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,
0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//n 78
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,
0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//o 79
0x80,0x80,0x00,0x80,0x80,0x00,0x00,0x00,
0x80,0xFF,0xA1,0x20,0x20,0x11,0x0E,0x00,//p 80
0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x00,
0x00,0x0E,0x11,0x20,0x20,0xA0,0xFF,0x80,//q 81
0x80,0x80,0x80,0x00,0x80,0x80,0x80,0x00,
0x20,0x20,0x3F,0x21,0x20,0x00,0x01,0x00,//r 82
0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,
0x00,0x33,0x24,0x24,0x24,0x24,0x19,0x00,//s 83
0x00,0x80,0x80,0xE0,0x80,0x80,0x00,0x00,
0x00,0x00,0x00,0x1F,0x20,0x20,0x00,0x00,//t 84
0x80,0x80,0x00,0x00,0x00,0x80,0x80,0x00,
0x00,0x1F,0x20,0x20,0x20,0x10,0x3F,0x20,//u 85
0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,
0x00,0x01,0x0E,0x30,0x08,0x06,0x01,0x00,//v 86
0x80,0x80,0x00,0x80,0x00,0x80,0x80,0x80,
0x0F,0x30,0x0C,0x03,0x0C,0x30,0x0F,0x00,//w 87
0x00,0x80,0x80,0x00,0x80,0x80,0x80,0x00,
0x00,0x20,0x31,0x2E,0x0E,0x31,0x20,0x00,//x 88
0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,
0x80,0x81,0x8E,0x70,0x18,0x06,0x01,0x00,//y 89
0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x00,
0x00,0x21,0x30,0x2C,0x22,0x21,0x30,0x00,//z 90
0x00,0x00,0x00,0x00,0x80,0x7C,0x02,0x02,
0x00,0x00,0x00,0x00,0x00,0x3F,0x40,0x40,//{ 91
0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,//| 92
0x00,0x02,0x02,0x7C,0x80,0x00,0x00,0x00,
0x00,0x40,0x40,0x3F,0x00,0x00,0x00,0x00,//} 93
0x00,0x06,0x01,0x01,0x02,0x02,0x04,0x04,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//~ 94
};
#endif
到了这里,关于STM32超声波——HC_SR04的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!