1该文档介绍基于灵动微电子 32 位微处理器 MM32SPIN0280 的电动工具无感方波控制方案, 包括 MM32SPIN0280 芯片资源以及软件说明。 以下是电动工具无感方波控制方案的功能列表:

文章来源地址https://www.toymoban.com/news/detail-818103.html

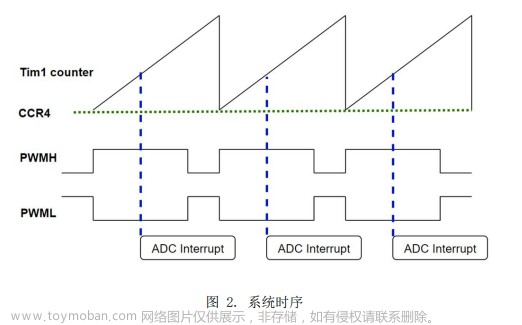
从图中可以看出,在本程序中 ADC 中断周期和 PWM 周期一致,过零点的检测在换相结束后 的 ADC 中断中对非导通相和母线电压的一半比较完成。

由图可知,系统上电复位后,先执行一段延时函数,等待系统稳定后开始初始化系统外设 及参数,最后使能对应的中断,在 while 循环中执行喂狗及 1ms 一次的慢速环状态机。 1) ADC 法检测过零点时,在 ADC1 中断执行过零点检测,在 TIM2 中执行延时和换相。 2) 比较器法检测过零点时,在 TIM14 中断执行过零点检测,并执行延时和换相。
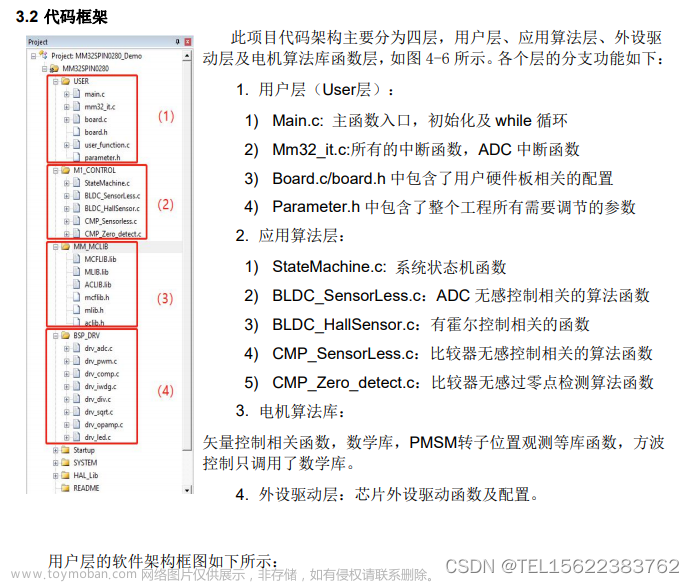
系统驱动层主要包含常用的电机外设的配置如下所示:

3.3 软件流程图 该案整体软件流程设计如下图所示,在 Main()函数主要执行低速任务:1ms 时间片执行电 位器调速和加减速曲线调节。ADC 采样完成中断里读取母线电压、电流、转速命令值以及电机 三相反电动势电压并检测过零点。TIM1 产生 6ch PWM,并启用 break 中断。Systick 中断的定 时可作为系统时基。 1) 使用 ADC 法检测过零点时,将使能 TIM2 中断执行过零点检测以及延时换相功能。 2) 使用比较器法检测过零点时,将会使能 TIM14 中断进行过零点检测以及延时换相功能
文章来源:https://www.toymoban.com/news/detail-818103.html
到了这里,关于基于 MM32SPIN0280 无感方波 BLDC 电动工具驱动篇应用笔记的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!