作者:林震|曹操出行实时计算负责人
曹操出行业务背景介绍
曹操出行创立于2015年5月21日,是吉利控股集团布局“新能源汽车共享生态”的战略性投资业务,以“科技重塑绿色共享出行”为使命,将全球领先的互联网、车联网、自动驾驶技术以及新能源科技,创新应用于共享出行领域,以“用心服务国民出行”为品牌主张,致力于打造服务口碑最好的出行品牌。
作为一家互联网出行平台,主要提供了网约车、顺风车、专车等一些出行服务。打车为其主要的一个业务场景。用户会在我们的平台中去进行下单,然后我们的系统会给司机进行派单,接到订单之后,进行履约服务。结束一次订单服务后,乘客会在平台做出支付。

曹操出行业务痛点分析

整个流程中这些数据会流转到我们的业务系统,主要会有营销、订单、派单、风控、支付、履约这些系统。这些系统的数据会进入到RDS数据库,流转到实时数仓中去做一个分析和处理。最终数据会进入到不同的使用场景中,比如实时的标签,实时大屏、多维BI,还有业务监控以及算法决策。
在传统lambda架构中,架构主要会分做实时数据流和离线数据流。在实时链路中,业务数据库会在RDS中通过Canal、Binlog同步的方式进入Kafka,同时app的log也会通过实时采集的方式进入到Kafka。在这些数据准备完成之后,在Kafka中构建实时数仓。整个数仓也是基于数仓分层理念去构建,主要是ODS、DWD、DWS和ADS,整个链路中会通过Flink Streaming Sql去做一个串联。
在离线链路中,数据主要是通过DataX定时同步的方式,将RDS数据同步到HDFS。同时App的log会通过定时任务同步到HDFS,整个离线数仓会通过Spark Sql的定时调度任务去逐层执行。数据在离线数仓中会通过不同的数据域去组织不同粒度的计算,最终数据会通过Flink Sink以及离线同步工具写到不同的数据应用组件中。同时为了保证某些应用场景中数据的一致性,有可能会对离线和实时两条链路的数据做些合并处理加工。

基于曹操出行整体对于成本的诉求,对于传统lambda架构,从架构中可以看到一些问题:
- 需要使用非常丰富的大数据组件,来适配不同应用场景。
- 研发成本非常高,不仅在实时链路中做大量的处理,而且在离线链路中也是多做一套研发。
- 运维效率较为低效,整个实时数仓是构建在Kafka上,因此我们这种数据探查以及这种数据订正就会变得非常困难。
- 资源成本较大,主要体现在组件使用多,需要专门的工作人员进行运维与管理;一些场景需要精准的一致性需求,因此在链路中需要做出数据的同步和计算。
- 在某些Flink场景中,需要处理大状态场景下,可能会造成额外性能与资源的浪费。
另外从对于公司开发者使用的角度,我们对实时数仓提出了以下几点诉求:
- 拥有统一组件满足不同业务场景诉求。
- 再实施复杂链路中保证数据的订正。
- Flink中一些大状态下的技术难点需要克服。
Hologres+Flink企业级实时数仓构建
Hologres能力分析
曹操出行作为Hologres的深度用户,在前期调研与测试阶段,我们对对Hologres的相关能力做了比较详细的分析,主要有以下优势:
1、业务场景能力丰富:
- 具备OLAP分析能力
- 具备高并发点查能力
- 具备半结构化日志分析能力
- 具备基于PostGIS的扩展能力,支持空间地理信息信息数据的分析与使用,对于曹操出行的业务属性来说非常重要。
2、一站式实时开发能力
- 契合数仓分层结构理念(可以像离线数仓一样去构建分层体系,数据实时流动,实时存储)
- Flink Streaming态高度融(Flink CDC组件集成,Flink Catalog集成)
- 统一Ad-hoc能力,能以外表加载离线数仓中数据进行加速联邦分析
3、解决的痛点问题
- 全链路低时延
- 多流join场景很好提供数据打宽的能力,支持主键模型和行级,局部字段更新的能力
- 支持Count distinct大状态精确去重场景
Hologres支持高并发更新

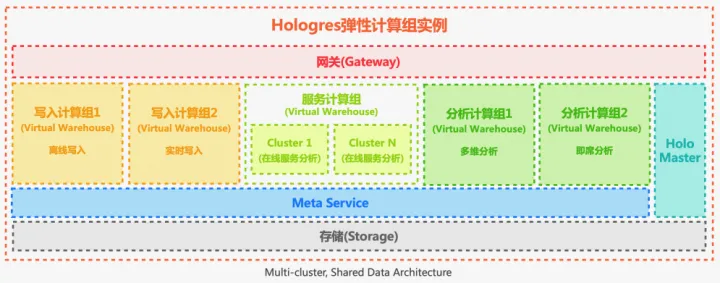
通过观察存储架构,我们发现Hologres在最底层是分布式存储系统,在此之上是一个存储引擎,主要是有Block Cache,shard是分多个Tablet与WAL,市面上主流的这种服务产品大多数都是基于这种LSM架构。
主流数据主键模型更新模式也有Copy On Write 和Merge On Read。这两种场景都有各自的问题,Copy On Write具有写放大的问题,数据的延迟会比较高。Merge On Read由于在读的过程中需要做数据的大量合并,因此其读的性能会非常差。在Hologres中,行存使用Merge On Read方式,列存主要基于Merge On Write。基于这种架构,一条数据在进入Hologres中,首先会到达WAL Manager中,同时也会进入到Memtable,在Memtable中主要会存储三类数据:数据文件、删除标志的文件、例如基于RoaringBitmap、索引文件。当数据积累到一定阶段后会生成不可变的Memtable,后面会通过异步的线程,定时做 flush到Data File。
Hologres Binlog支持

Hologres Binlog也是一种物理表的存储方式,其跟原表的主要区别是内置的几种自身结构,包含自身递增序列,数据修改类型以及数据修改的时间,Binlog本质上也是分shard做存储,所以也为一种分布式表,并且在WAL之前生成,因此在数据上可以与原表保证强一致性。
其次Hologres Binlog修改类型也还原了Flink中四种RowKind类型。在数据更新过程中可以产生两条更新记录,并且保证更新记录是一个连续的存储。右边展示中,写入一个数据一个PK1,然后再写入一个PK2数据,PK2的数据再做更新,Binlog中它会产生四个数据结果。
Hologres数据模型介绍

Hologres主要会分做行存引擎以及列存引擎,包括行列共存场景。
- 在聚合场景中主要是用到列存的引擎,适合OLAP场景,适合复杂查询,统计,关联等场景。同时也提供了非常丰富的索引,包括技术聚簇索引,位图索引,字典,以及基于时间序列的范围索引。
- 在KV场景中主要是用到行存的引擎,主要支持高并发组件查询。包括在Flink中做维表反查也是非常适合。
- 在订阅场景中主要是用到行存的引擎,主要在表属性中要进行声明,比如说Binlog是否开启,Binlog的TTL。在订阅方的话,Hologres支持CDC以及非CDC的模式。
- 在日志场景中主要针对聚合场景,主要是支持JsonB数据类型。JsonB在这个数据的这种处理过程中,它能够自动地平铺成列式的存储结构,就可以做聚合场景的灵活分析。同时它可以自动去对这种数据类型做解析,包括对数据类型做泛化处理,以及数据的对齐,非常适合这种非稀疏场景。
曹操出行实时数仓构建实践
实时数仓架构设计

基于以上Hologres的能力,接下来是对于曹操内部实时数仓的架构设计,左边为RDS数据库,最右边是应用系统,最下边为元数据管理,中间部分是实时数仓的部分。数据通过Binlog进入到Kafka的ODS层之后,再会通过Flink会写入到Hologres里的DIM层,然后再通过Flink做ODS的多流汇聚,再写入到Hologres的DWD层。在DWD中可以做宽表打宽的是实现。再下一层,通过Binlog的订阅的方式,再写入到Hologres的DWS层,后面会统一通过One Service的一个统一查询服务对外暴露这个服务。
dwd宽表构建实践

接下来介绍一下Hologres DWD宽表层的一个构建实践。基于之前提到的Hologres列更新能力,能够很好实现宽表Join能力。在整个生产过程中,首先关注维表的应用场景,其应用场景可能含有多种:一种是维表是不变的,或者缓慢的变化,另一种是维表频繁变化的。因此需要像离线的方式去构建一个维表拉链的数据,通过用过Start Time和End Time的方式去存储维度状态有效的一个周期。
其次需要关注维表延迟的问题。在实际生产过程中,维表链路与主表的链路是一个异步的过程,有可能在维表延迟的情况下,主表关联的数据是空的,或者主表关联到的一个数据是过时的维度状态。在这种场景下,需要在Hologres做维度缺失记录的过滤,通过补偿机制再去做维度的补偿处理,同时也需要做定时的维度检查,然后增量地把不一致的状态做一个修正。
聚合计算场景优化

接下来介绍我们对聚合场景的优化,针对我们多预聚合计算场景,将其统一收敛到Rollup计算模型中,主要解决以下问题:
- 在Flink聚合场景中经常会出现状态兼容性的问题
- 整个数据的复用性非常差,研发人员收到新的需求,例如新的指标或者新增维度粒度时,为了不影响生产数据的稳定性,往往选择自己去构建新的任务,久而久之这种零散的任务会变得非常多,整个管理随之会变的非常混乱。
因此曹操出行主要优化了两点:
- 构建MapSumAgg算子,MapSum主要通过对SumAgg算子做了重新设计,使之能够支持Map内部结构的求和逻辑
- 对Grouping Sets进行动态配置化,这样Grouping Sets动态增加维度粒度,使整个任务在不重启的情况下也能自动去做自适应
结合这两点,把已有的指标放入map结构中进行封装,这样在不改变原有的算子状态,也可以得到很好的处理。在下游中可以针对不用维度,指标做好选择,然后通过同步工具做好数据路由,提供给下游的服务。

对于第二个聚合场景的优化,是对精确去重场景的拆分。在前面例子中,我们把Count Distinct的精确去重做了剥离,主要解决两个问题:
- 维度爆炸的问题。在Flink回撤机制下做精确去重时,存储的全量状态。那么在cube场景中,这种状态爆炸式的情况,在Flink中是难以持续去建设。解决思路是通过Hologres去构建细粒度的RoaringBitmap存储方案。
- 查询灵活高效的问题。整个流程中,在Hologres中构建自身序列的UID维表,在主表中通过反差逻辑将UID自身序列反查出来,随之在Flink中做出Group by的操作,最终通过聚合计算,算出RoaringBitmap的结果,随之写入Hologres的DWS层中,形成UV计算的轻度汇总表,解决应用端灵活维度查询时的高效性,同时也能满足解决Flink爆炸维度问题。
链路中吞吐能力调优

整个流链路中吞吐能力的调优主要分作两个部分:
- 数据写入侧。在Flink写入到Hologres之前,针对字段状态变更频繁的场景做了一层Union层,在Union层以及ODS层中,数据都是基于PK进行分区,然后在Union层中做了一层小的窗口进行预聚合的计算,这样可以大大减少对Hologres写入压力,从而提升整个数据吞吐量,但这种方式有一个缺点就是比如一些中间状态的数据,会变得无法捕获。
- 数据读取侧。在Binlog中更新数据,它会产生连续的变更前后数据,在这种场景中,可以通过lag开窗的这种方式获取到一次变更中连续上下游数据的情况,根据两者数据之间的信息差异,可以过滤出数据的冗余变更,从而减轻整个处理下游的压力。
元数据血缘的改造

元数据血缘的改造主要解决了以下问题:
- Schema的演进提供了一个更便利的管控
- 整个依赖链需要解决实时链路发布流程的问题
- 可以对任务元数据信息进行有效的管理
曹操出行主要进行以下措施:
- Flink Catalog集成。在元数据中去整合Hologres的Catalog,也支持Kafka Topic表中自定义Catalog,支持多版本schema和任务数据的多版本。
- Kafka Source和Kafka Sink的改造。结合整合整个上线发布的流程,对于数据的版本信息,通过Kafka Sink对Header进行记录,Kafka Source对header的版本信息进行过滤,从而把数据版本引入到整个上下游的链路,提供上下游数据灵活的迭代。这种做法的好处是,在整个链路中可以感知到整个下游数据的使用情况,因此可以帮助用户在下线过程中可以快速定位到下游,还有没有任务做依赖,右边的图片主要是展示一个开发流程中元数据的集成。
链路保障体系

在日常开发过程中,对于任务健康以及任务出现异常后的判断和检测,都是通过异常检测诊断工具去做支持。主要体现四个方面:
- 对于基础信息采集,通过采集工具,把Flink内置的Metric以及Kafka信息进行采集,提供基础数据,包括作业信息,Kafka一些Topic信息,作业最新指标情况。
- 对于异常的判断,通过内存以及Topic增长情况,包括CPU使用情况,以及任务有无出现反压,任务有无倾斜做出异常的判断。
- 对于异常原因的诊断-内部原因,内部原因主要会看CheckPoint的失败情况,Kafka LAG具体是什么算子造成的反压,Restart的次数;
- 对于异常原因的诊断-外部原因,外部原因主要是看Job Manager以及Task Manger所在节点自身的情况,包括CPU的使用率,包括ioutil,内存情况,然后做出综合判断,帮助用户去快速定位具体问题的原因。

链路保障体系另外一个比较重要的环节就是全链路的感知能力。曹操出行主要是在流量监控与Latency监控两方面:
- 流量监控层面:通过Kafka Cueernt Offset以及Hologres内置的Offset信息做定时的采集,从而推算出Kafka以及Hologres表的生产速率。
- Latency监控层面:主要采集Kafka Offset以及Flink Source的Offset情况,结合Kafka Massage Timestamp去推算出每个任务自身延迟情况,再结合整个数据血缘进行一个串联,可以得出端到任务自身整体的延迟时间,再通过任务上下游生产速率比,以及任务自身延迟情况,可以在整个生产链路中快速定位出具体异常和问题发生的节点。
数据订正能力建设

在传统的Streaming链路中,数据订正是一个非常复杂的过程。主要要解决两个问题:
- 如何知晓订正的数据为正确数据?验证其具有一定困难。
- 在整个验证过程中,如何保证对下游的透明?如果丢状态去做重启的订正,肯定会对下游造成很大的影响。
因此我们主要思路是基于Hologres去做实现。首先对于原始任务进行代码修正后,并维持原有状态去做重启。第二步将对Hologres表做Schema的拷贝,然后新建一个订正的临时表。第三步会将任务进行拷贝,并将Sink调整到订正临时表,去做无状态从头消费的重启。这样可以把订正的结果数据订正进Hologres订正表中。等待消费结束后停止订正任务,然后通过修正脚本去对比原表以及订正表中关键信息,去做数据的订正。由于数据的订正,它处于数据终态,对于下游来说,不会造成大起大落。并且在整个链路中,因为正确数据可以通过整个数据链路做回撤的传导,因此整个下游就可以完成数据的自动订正。
曹操出行业务成果分析

架构清晰简单:
- 对比Lamada架构,Hologres+Flink整体架构更加清晰,使用数据组件大大减少
- 整体技术复杂难度降低,原先为了解决数据一致性问题,数据需要在不同的异构存储和异构链路中来回传输和计算,整个技术复杂度较高
开发效率提高:
- 整个开发模式变得简单易用,大大缩短人力周期
- 数据实时模型分层非常清晰,整体下游复用性以及使用门槛大幅度降低
运维体验提升:
- 由于数据存储在Hologres之上,因此数据探查更加便捷,数据订正难易程度大幅度减少。
成本减少:
- 组件维护成本减少。
- 数据的离线存储和实时存储,从双份存储降低到一份存储,以及降低了数据在异构存储之间的同步与计算成本
- 解Fflink中各类计算场景中大状态的成本,减少了计算开销并提升了处理性能。
未来展望

未来展望主要分为以下几个层面:文章来源:https://www.toymoban.com/news/detail-821533.html
- 当前Flink集群还是一个自建的集群,对于这些集群我们业务最关心的是使用过程中,其业务的稳定性和可靠性。特别是在高峰场景,资源不足时,怎么去做快速的缩扩容。在高峰期过去后怎么去做到无缝缩容,降低业务风险,包括减少业务的数据中断时间。
- 在任务级别的动态感知和智能调控上。很多时候研发根据自己的经验去设置Flink的资源参数,往往有很多资源其实是多设或者是额外设置的。通过动态感知能力的引入,能够有效提升整体的资源使用情况,包括未来也可能会引入智能算法,包括自适应的机制去达到节约成本的目的。
- Flink CDC来统一ODS入仓的方案。我们在离线使用DataX的入仓方案,后来实时使用了Flink CDC的入仓方案,其实本质上数据可以提供一个统一的解决思路,来解决数据的一致性和灵活性的诉求。包括在CDC方案中,也会有一些定制上的需求。比如说在CDC过程中,怎么去解决加解密的一些问题,包括RDS数据库中数据归档的一些问题。后续的话也会分阶段的做一些调整,包括一些高频迭代的诉求,会在后续的规划中提前去做解决。
- 关于数据服务的一个规划。因为曹操出行有很多服务的场景,特别是在线应用的这种场景,包括分析型的这种服务也在上面,需要高可用的数据服务以及服务可扩展性,那怎么样通过同一份数据来做到不同服务的扩展。后续会考虑基于Hologres主从隔离的能力,通过一主多从的能力去支持多种数据服务的扩展。
点击Hologres实时湖仓分析挑战赛-阿里云开发者社区,加入5分钟使用Hologres实时湖仓加速分析挑战赛,赢精美礼品文章来源地址https://www.toymoban.com/news/detail-821533.html
到了这里,关于基于Hologres+Flink的曹操出行实时数仓建设作者:林震|曹操出行实时计算负责人的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!