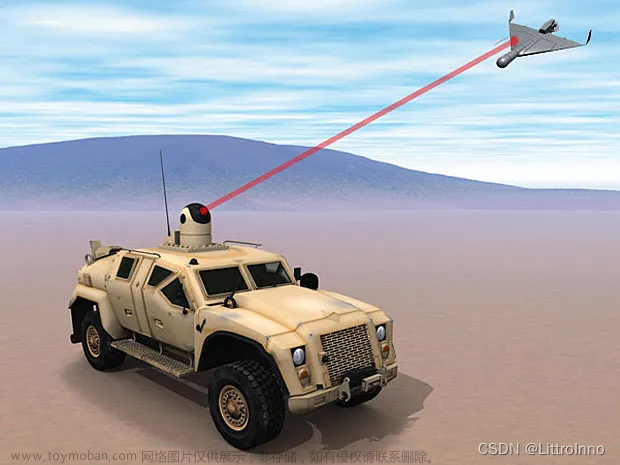
激光无人机(UAV)打击系统中的光束控制和指向系统通常包括以下几个关键组件和技术:
-
激光发射器:这是系统的核心,负责生成高能量的激光束。常用的激光类型包括固体激光器、化学激光器、光纤激光器等,选择取决于所需的功率、射程和稳定性。
-
光束质量控制:高质量的光束对于有效打击目标至关重要。这可能包括使用光束整形器、透镜和其他光学元件来调整和维持光束的聚焦性能。
-
指向和跟踪系统:这些系统通常包括高精度的伺服控制系统和各种传感器(如红外、雷达或光学传感器),用于实时检测、追踪并精确地指向目标。
-
稳定化平台:由于无人机移动快速且尺寸小,激光系统需要安装在一个能够快速调整方向并抵消车辆或平台震动的稳定化平台上。
-
控制软件和接口:这些软件负责协调上述所有组件的工作,执行快速计算以实时调整激光指向,并提供用户界面供操作员控制系统。
-
热管理系统:由于激光器发射时会产生大量热能,有效的散热系统对于维持设备的稳定运行至关重要。
-
电源和能量管理:强大的激光系统需要稳定而强大的电源,这可能包括电池组、发电机或其他能量供应系统。文章来源:https://www.toymoban.com/news/detail-821762.html
 文章来源地址https://www.toymoban.com/news/detail-821762.html
文章来源地址https://www.toymoban.com/news/detail-821762.html
到了这里,关于激光无人机打击系统——光束控制和指向系统的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!