上次说的向量空间是为矩阵服务的。
1、学科回顾
从科技实践中来的数学问题无非分为两类:一类是线性问题,一类是非线性问题。线性问题是研究最久、理论最完善的;而非线性问题则可以在一定基础上转化为线性问题求解。
线性变换:
数域F上线性空间V中的变换T若满足条件:
T(a + b) = Ta + Tb (a,b ϵ V)
T(ka) = kTa (k ϵ F, a ϵ V)
则称T为V中的线性变换。
线性变换两方面的意义:变换空间里的向量,空间坐标系不变;或者变换坐标系而向量不变。两者是相对的,结果等价。
2、矩阵
作为一种新型的数学表示工具,是“比例函数”概念的推广,是描述向量之间变换关系的。比例函数的系数是“数”与“数”之间的线性对应关系,是把一个数变为另一个数,那么矩阵则是向量与向量之间的线性对应关系,是把一个向量变成另一个向量。
矩阵把一个向量变成另一个向量是发生在向量空间里的变换运动,该变换有个专业名词叫线性变换或线性映射。这可以称为矩阵的几何意义。
矩阵独立的几何意义表现为对向量的作用结果。矩阵对一个向量是如何作用的?矩阵对多个向量是如何作用的?矩阵对空间上的坐标基向量又是如何作用的?
一个矩阵就描述了向量空间中的一个运动——变换,这个矩阵规定了所有向量的变换规则。
2.1 矩阵与任意向量的乘积的几何解释


2.2 矩阵与矩阵乘法的几何意义
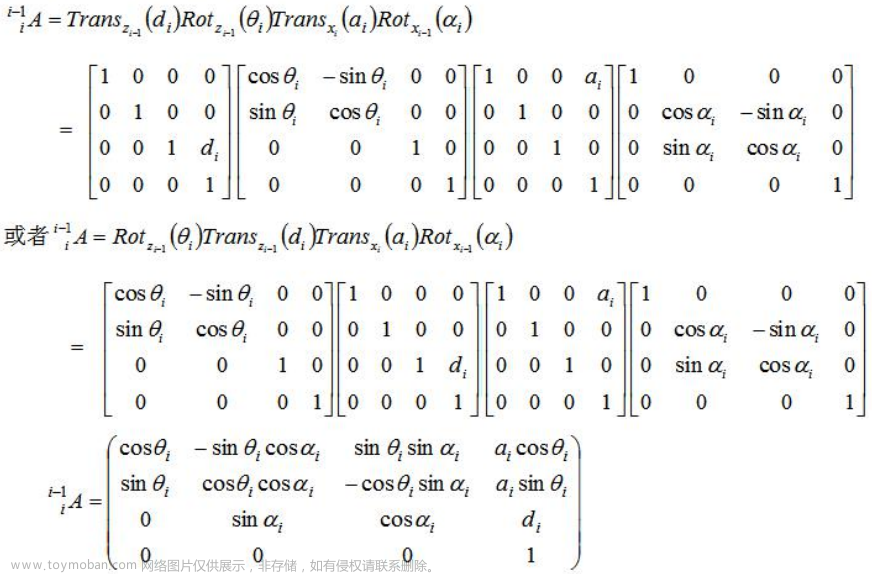
两个矩阵相乘,如AB的几何意义可以从多个角度来了解。如果把矩阵A看做一个几何图形,那么乘以B就是把A的图形进行了有规律的变换,这个变换就是线性变换(将矩阵A看做多个向量的组合)。如果把两个矩阵看做等同的,那么AB的结果是把两个线性变换进行了叠加或复合(机械臂6个变换矩阵连乘)。

机械臂运行在3维空间,为什么是一个4×4的矩阵呢?
2.3 矩阵与线性变换关系的几何意义
m×n阶矩阵可表示把一个n维空间的向量映射到m维空间的向量的线性映射,而一个n阶方阵是把一个n维空间的向量映射到自身空间另外一个向量的线性变换。
2.3.1 线性变换如何用矩阵表示

举例说明:

2.4 两个矩阵相乘是两个线性变换的复合

2.5 特征值和特征向量的几何意义
考研人很熟悉。

什么样的方阵对向量只有旋转而没有伸缩变化呢?它有什么特征呢?

《线性代数的几何意义》——任广千
 文章来源:https://www.toymoban.com/news/detail-823082.html
文章来源:https://www.toymoban.com/news/detail-823082.html
PS:推荐一个pdf阅读软件——SumatraPDF,可以直接选中印刷版的pdf复制,可以双击获取图片,还很小,不到23M。 文章来源地址https://www.toymoban.com/news/detail-823082.html
到了这里,关于5_机械臂运动学基础_矩阵的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!