stm32步进电机S型加减速程序源码与详细分析,资料为算法实现以及算法的相关讲解,例程中有stm32f103步进电机S型加减速的完整工程代码,对步进电机s型加减速控制很有帮助





标题:基于STM32的步进电机S型加减速控制程序源码与详细分析
摘要:本文介绍了一种基于STM32的步进电机S型加减速控制的算法实现及其详细分析。通过提供完整的工程代码,读者可以了解如何在STM32F103系列微控制器上实现步进电机的S型加减速控制,并且它对于步进电机加减速控制的学习和实践具有很大的帮助。
引言:
步进电机作为一种常用的驱动器,广泛应用于许多自动化控制系统中。S型加减速控制是一种常见的步进电机控制算法,它能够在保证电机转速平滑过渡的同时,提高电机运动的精度和平稳性。本文将详细介绍基于STM32的步进电机S型加减速控制算法的实现原理,并提供了相应的源码和工程文件,帮助读者深入理解并实践该算法。
- 算法原理
1.1 步进电机工作原理回顾 在介绍S型加减速控制算法之前,首先回顾步进电机的工作原理和基本特性。具体包括步进电机的结构、控制方式、步进角以及旋转方向等方面。
1.2 S型加减速控制算法原理 S型加减速控制算法通过改变步进电机的脉冲频率,使电机的转速在启动、加速、匀速、减速和停止等阶段都能够平滑过渡。本节将详细介绍S型加减速算法的原理、步骤以及相关的公式推导。
- STM32步进电机S型加减速程序源码实现
2.1 STM32环境搭建与配置 在正式实现S型加减速控制算法之前,我们需要先搭建适用于STM32F103系列微控制器的开发环境,并对相关的外设进行配置。本节将介绍如何搭建STM32开发环境以及如何配置GPIO和定时器等外设。
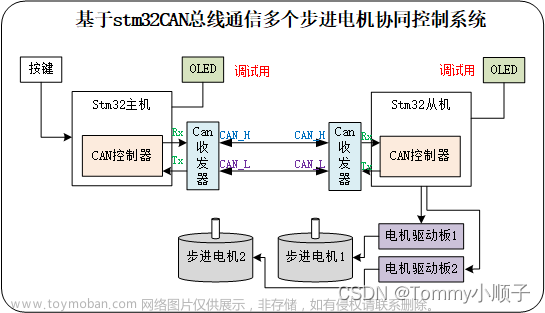
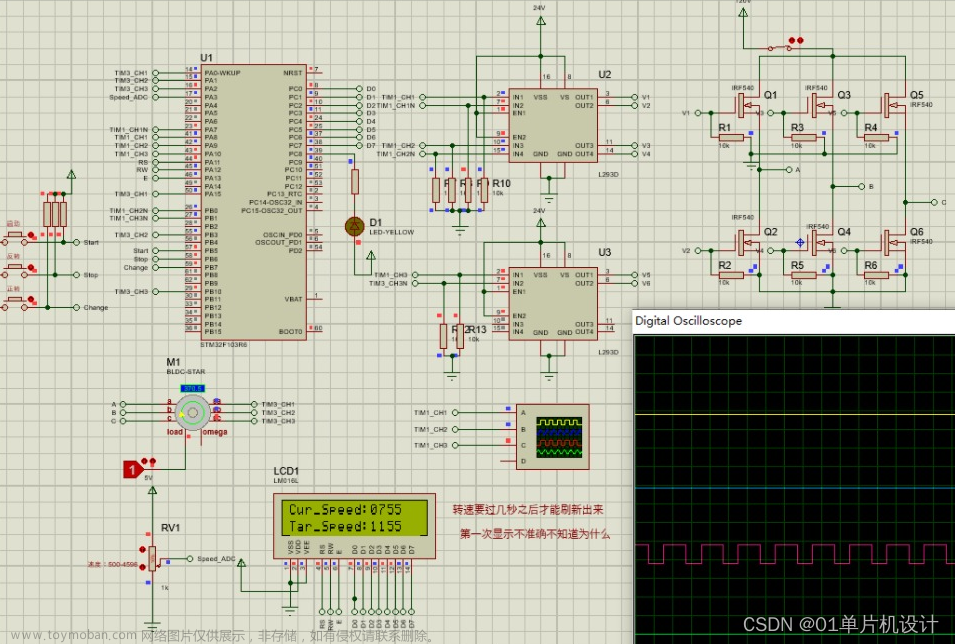
2.2 步进电机驱动电路设计 为了实现步进电机的控制,我们需要设计相应的驱动电路。本节将介绍步进电机驱动电路的基本原理,并给出相应的电路设计和连线示意图。
2.3 S型加减速控制程序实现 本节将详细介绍基于STM32的步进电机S型加减速控制程序的实现。通过对源码的逐行分析,读者将能够全面了解程序的功能和实现过程。
- 算法分析与实验结果
3.1 算法性能分析 为了评估该S型加减速控制算法的性能,本文对其进行了详细的分析和评估。包括转速精度、加减速平稳性等方面的指标。
3.2 实验结果与讨论 本节将给出基于STM32的步进电机S型加减速控制实验的相关结果和讨论。通过对实验数据的分析,读者可以了解算法在实际应用中的效果。
- 结论与展望
4.1 结论总结 本文通过详细介绍基于STM32的步进电机S型加减速控制算法的实现原理和实验结果,表明该算法能够在保证电机转速平滑过渡的同时,提高电机运动的精度和平稳性。
4.2 展望 未来的工作可以进一步优化算法的性能和稳定性,并将该算法应用于更广泛的步进电机控制系统中。
参考文献:
[1] 陈立华, 张岚. 步进电机S型加减速控制的设计与实现[J]. 电子设计工程, 2017(05): 67-70.
[2] 江军, 张艳娜. 步进电机S型加减速控制算法研究[J]. 机电一体化技术与应用, 2015(10): 83-87.
[3] STM32F103系列微控制器参考手册.
[4] 叶丰. 嵌入式系统设计与开发实例精解[M]. 科学出版社, 2018.
总结:
本文针对STM32步进电机S型加减速控制的需求,详细介绍了该算法的原理、实现以及相关实验结果。通过对源码的分析,读者可以深入理解算法的实现过程,并了解其在步进电机控制系统中的应用。本文希望能够为读者在步进电机控制方面提供一定的参考和帮助,同时也鼓励读者在该领域深入研究和探索,推动步进电机控制技术的发展和应用。文章来源:https://www.toymoban.com/news/detail-823223.html
相关代码,程序地址:http://lanzouw.top/664598558668.html
文章来源地址https://www.toymoban.com/news/detail-823223.html
到了这里,关于stm32步进电机S型加减速程序源码与详细分析,资料为算法实现以及算法的相关讲解的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!