一、前言
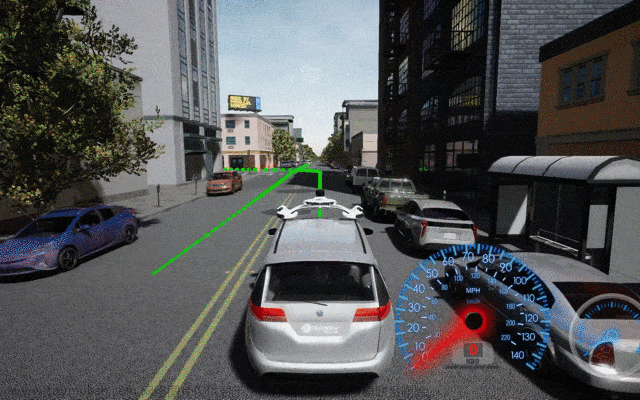
- 多相机目标跟踪主要是为了实现 360 度跟踪。单相机检测存在左右后的盲区视野。
- 在智能驾驶领域,要想靠相机实现无人驾驶,相机必须 360 度无死角全覆盖。
- 博主提供一种非深度学习方法,采用kalman滤波+匈牙利匹配方式实现环视跟踪。有兴趣可以参考往期【目标跟踪】系列博客。
- 本文干货满满,可以先点赞关注收藏,以免下次找不到。欢迎各位吴彦祖私信交流学习。
二、流程图
干货怎么会少了流程图,上图!上图!上图!。流程图用 processon 制作的,不是付费软件买不起,而是免费的更有性价比。

这里最重要的就是航迹管理,对于四路相机(front, left, right, back) 检测的目标都需要管理。这里面不仅要对单相机目标进行跟踪,且对跨相机的目标也需要进行跟踪,还有各种匹配,初始化,开始消亡等到。想想都头皮发麻,那到底怎么做?别慌,让我娓娓道来。
街上熙熙攘攘的人群交头接耳,果然雨过天晴就会有聊不完的话题。三只白鹭停泊在河边享受着阳光的沐浴,不时煽动自己羽毛,引起阵阵涟漪,如此惬意无不让打工人憧憬。远处的山峰层峦叠嶂,仿佛去到世界尽头。命运的齿轮正在转动,会当凌绝顶,一览纵山下。
wc !!!思绪差点飘离银河系,还是敲键盘要紧。下面看看实现原理。
三、实现原理
3.1、初始化
保存四路相机参数:4路相机内参与外参。
制定表格 1920 * 1080 ,用于后续判断计算校正后的像素点。对整张图片进行校正会占用大量 CPU,我们采用对原图进行计算。

3.2、输入
nuscenes 是六路相机。我们这里是四路相机,全部都是 190° 鱼眼相机。
输入四路相机检测结果。当前相机当前帧的所有目标信息
- 二维 box 检测框 (x,y,w,h)
- 目标列表 label。如person、car等
- 目标的置信度 score
演示这里采取的是 2D 检测。如果是 3D 检测也是类似计算,且 3D 检测定位更加精准。
3.3、初始航迹
(1) 划分 4 象限

(2) 划分 8 区域
前相机第4象限、前相机第1象限、右相机第3象限、右相机第4象限、后相机第2象限、后相机第3象限、左相机第1象限、左相机第2象限。

(3) 划分 2 类
前相机第4象限、右相机第3象限、后相机第2象限、左相机第1象限 为一类 firstBox。
右相机第4象限、后相机第3象限、左相机第2象限、前相机第1象限 为一类 secondBox。
(4) 分配 id
当目标是属于 firstBox 一类的目标时,此时直接分配 id 。分配一个 id ,则 idCount ++。
(5) 匹配
sencondBox 中的目标需要与 firstBox 目标匹配。计算距离与角度。
如果匹配上时,id = firstBox 目标 id
如果未匹配上时,id = idCount , idCount ++
3.4、航迹预测
这部分比较简单, 正常预测就行。
对每个目标的box进行预测; 对每个目标的状态,距离、速度、加速度进行预测; 得到预测后的目标状态、box、相应传感器(枚举)。
3.5、航迹匹配
(1) 预测框与检测框
预测框是上一帧所获得的预测框;检测框是当前检测信息的检测框。同时对目标有预测的距离与测量距离
(2) 匈牙利匹配矩阵
如果属于不同相机检测的目标,则设为默认最大值;如果属于同一相机检测目标,计算iou。这个是与单相机跟踪类似。
(3) 匹配修正
匹配上的目标,修正预测的状态与box。此时idCount 不变。
(4) 未匹配的检测框
对于未匹配的检测框,寻找航迹中在其他相机的目标,进行再次匹配。如果匹配上,则未匹配检测框id = 其他相机目标id。否则赋予id = idCount,idCount++。
3.6、输出结果
输出俯视角下所有目标的位置(x, y)。
四、c++ 代码
这部分代码比较多,展示划分象限初始航迹代码。其他代码放到资源自行下载。
// 1、管理航迹信息
void Tracking::ManageTrack(std::vector<TrackingBox> detectData)
{
std::vector<StateBox> firstBox; // 目标所处相机与第几象限 front 4, right 3, back 2, left 1
std::vector<StateBox> secondBox; // 目标所处相机与第几象限 right 4, back 3, left 2, front 1
// 1.1 分配id
for (unsigned int i = 0; i < detectData.size(); i++) {
StateBox stateBox;
stateBox.sensor = detectData[i].sensor; // 相机传感器的方位
stateBox.label = detectData[i].label; // 目标标签
stateBox.score = detectData[i].score; // 目标置信度
stateBox.box = detectData[i].box; // 检测框
std::vector<float> p = detectData[i].position; // 根据图像像素获取世界位置 x,y相对于车体
stateBox.position = p;
stateBox.state = {(cv::Mat_<float>(6, 1) << p[0], 0, 0, p[1], 0, 0), pInit}; // 初始化distanceKalman的状态与协方差
if ((stateBox.sensor == 0 && p[1] < 0) || (stateBox.sensor == 1 && p[0] < 0) ||
(stateBox.sensor == 2 && p[1] > 0) || (stateBox.sensor == 3 && p[0] > 0) ) {
stateBox.kBox = KalmanTracker(detectData[i].box); // KalmanTracker所需的box
stateBox.id = countId;
countId++;
firstBox.push_back(stateBox);
}
else {
secondBox.push_back(stateBox);
}
}
for (auto box:firstBox) {
trackers.push_back(box);
}
// 1.2 匹配id
unsigned int firstNum = firstBox.size(); // 前相机在右侧个数
unsigned int secondNum = secondBox.size(); // 右相机在前侧个数
std::vector<std::vector<double>> matrix; // 关联矩阵->匈牙利匹配
matrix.resize(firstNum, std::vector<double>(secondNum, 1)); // resize关联矩阵大小
std::vector<cv::Point> matchedPairs;
if (firstNum != 0 && secondNum != 0) {
for (unsigned int i = 0; i < firstNum; i++) {
for (unsigned int j = 0; j < secondNum; j++) {
matrix[i][j] = GetWeight(firstBox[i].position, secondBox[j].position); // 计算角度权重
}
}
HungarianAlgorithm hungAlgo;
std::vector<int> assignment;
hungAlgo.Solve(matrix, assignment); // 匈牙利匹配计算
std::set<int> unMatchedSecondBox; // 存放未匹配的sencond 类型的框
for (unsigned int i = 0; i < firstNum; ++i) {
if (assignment[i] == -1) {
continue; // 过滤掉无效的值
}
matchedPairs.push_back(cv::Point(i, assignment[i]));
}
}
// 1.3 修正id
int firstId, secondId;
for (unsigned int i = 0; i < matchedPairs.size(); i++) {
firstId = matchedPairs[i].x;
secondId = matchedPairs[i].y;
if (matrix[firstId][secondId] < hungarianThreshold) {
secondBox[secondId].kBox = KalmanTracker(detectData[i].box);
secondBox[secondId].id = firstBox[firstId].id;
trackers.push_back(secondBox[secondId]);
}
}
for (auto secBox:secondBox) {
if (secBox.id == -1) {
secBox.kBox = KalmanTracker(secBox.box);
secBox.id = countId;
countId++;
trackers.push_back(secBox);
}
}
}
五、总结
在计算过程中,特别注意边缘目标处理。由远到近目标航迹管理需要当心判断。还有马氏距离匹配参数、距离权重、kalamn参数需要自行调整。在宽阔场景,跨相机重要目标匹配成功率可以高达 80%文章来源:https://www.toymoban.com/news/detail-823709.html
代码仅供参考,禁止商业用途。欢迎私信交流。文章来源地址https://www.toymoban.com/news/detail-823709.html
到了这里,关于【目标跟踪】多相机环视跟踪的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!