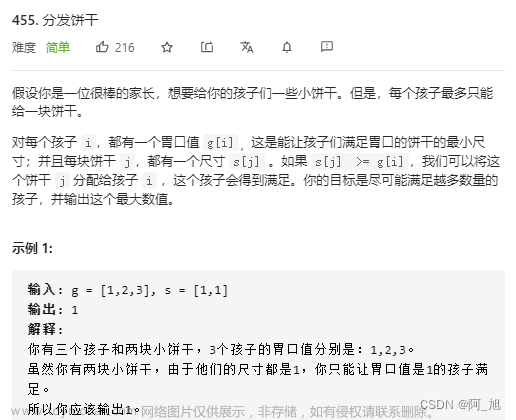
1041. 困于环中的机器人
在无限的平面上,机器人最初位于 (0, 0) 处,面朝北方。注意:
- 北方向 是y轴的正方向。
- 南方向 是y轴的负方向。
- 东方向 是x轴的正方向。
- 西方向 是x轴的负方向。
机器人可以接受下列三条指令之一:
-
"G":直走 1 个单位 -
"L":左转 90 度 -
"R":右转 90 度
机器人按顺序执行指令 instructions,并一直重复它们。
只有在平面中存在环使得机器人永远无法离开时,返回 true。否则,返回 false。
示例 1:
输入:instructions = "GGLLGG" 输出:true 解释:机器人最初在(0,0)处,面向北方。 “G”:移动一步。位置:(0,1)方向:北。 “G”:移动一步。位置:(0,2).方向:北。 “L”:逆时针旋转90度。位置:(0,2).方向:西。 “L”:逆时针旋转90度。位置:(0,2)方向:南。 “G”:移动一步。位置:(0,1)方向:南。 “G”:移动一步。位置:(0,0)方向:南。 重复指令,机器人进入循环:(0,0)——>(0,1)——>(0,2)——>(0,1)——>(0,0)。 在此基础上,我们返回true。
示例 2:
输入:instructions = "GG" 输出:false 解释:机器人最初在(0,0)处,面向北方。 “G”:移动一步。位置:(0,1)方向:北。 “G”:移动一步。位置:(0,2).方向:北。 重复这些指示,继续朝北前进,不会进入循环。 在此基础上,返回false。
示例 3:文章来源:https://www.toymoban.com/news/detail-825625.html
输入:instructions = "GL" 输出:true 解释:机器人最初在(0,0)处,面向北方。 “G”:移动一步。位置:(0,1)方向:北。 “L”:逆时针旋转90度。位置:(0,1).方向:西。 “G”:移动一步。位置:(- 1,1)方向:西。 “L”:逆时针旋转90度。位置:(- 1,1)方向:南。 “G”:移动一步。位置:(- 1,0)方向:南。 “L”:逆时针旋转90度。位置:(- 1,0)方向:东方。 “G”:移动一步。位置:(0,0)方向:东方。 “L”:逆时针旋转90度。位置:(0,0)方向:北。 重复指令,机器人进入循环:(0,0)——>(0,1)——>(- 1,1)——>(- 1,0)——>(0,0)。 在此基础上,我们返回true。
提示:文章来源地址https://www.toymoban.com/news/detail-825625.html
1 <= instructions.length <= 100-
instructions[i]仅包含'G', 'L', 'R'
class Solution {
public boolean isRobotBounded(String instructions) {
char[] c = instructions.toCharArray();
int d=0;//北0,东1,南2,西3
int[] dist = new int[4];
for (int i = 0; i < c.length; i++) {
if(c[i]=='L') {
d = (d+3)%4;
}
if(c[i]=='R') {
d = (d+1)%4;
}
if(c[i]=='G') {
dist[d]++;
}
}
if(d==0&&(dist[0]!=dist[2]||dist[1]!=dist[3])) {//向北,且位移量不为0
return false;
}else {
return true;
}
}
}到了这里,关于困于环中的机器人的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!