前言
尝试用一些数据生成有凹凸面的点云。
我们姑且把z轴当成有凹凸的缺陷,x轴和y轴共同组成一个平面。
高斯函数
原理
高斯函数wiki中,我们得知
其中,σ为标准差,用来控制“钟形”的宽度。
根据wiki中下面的举例sigma_X = 1;sigma_Y = 2;可以看出,σx=σy时,高斯的水平集是个圆,σx不等于σy时,高斯的水平集是个椭圆。(可以这样想:在平面上的公式,圆和椭圆的区别)
继续往下看:

代码
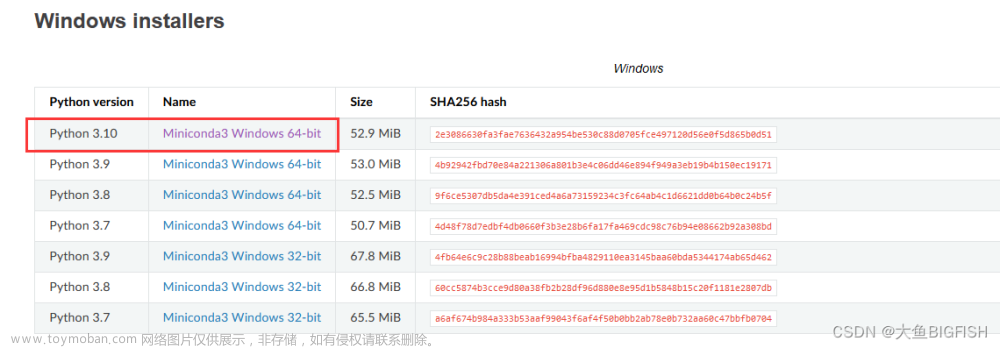
再根据wiki中下面的 Octave 代码,仿写出python代码:
# 导入 numpy 和 open3d 库
import numpy as np
import open3d as o3d
# 定义高斯函数的参数
A = 1
x0 = 0
y0 = 0
sigma_X = 1
sigma_Y = 2
# 生成 X 和 Y 的坐标网格
X, Y = np.meshgrid(np.arange(-5, 5.1, 0.1), np.arange(-5, 5.1, 0.1))#-5到5,步长为0.1
# 创建 open3d 点云对象
pcd = o3d.geometry.PointCloud()
# 循环旋转角度
for theta in np.arange(0, np.pi, np.pi / 100): # 0 到 π,步长为 π / 100 #可以改变这个值
# 计算高斯函数的系数
a = np.cos(theta) ** 2 / (2 * sigma_X ** 2) + np.sin(theta) ** 2 / (2 * sigma_Y ** 2)
b = np.sin(2 * theta) / (4 * sigma_X ** 2) - np.sin(2 * theta) / (4 * sigma_Y ** 2)
c = np.sin(theta) ** 2 / (2 * sigma_X ** 2) + np.cos(theta) ** 2 / (2 * sigma_Y ** 2)
# 计算 Z 的坐标
Z = A * np.exp(-(a * (X - x0) ** 2 + 2 * b * (X - x0) * (Y - y0) + c * (Y - y0) ** 2))
# 将 X, Y, Z 合并为点云矩阵,形状为 (n, 3)
points = np.stack((X, Y, Z), axis=-1)
points = points.reshape(-1, 3)
# 更新点云的坐标
pcd.points = o3d.utility.Vector3dVector(points)
# 添加坐标
coord = o3d.geometry.TriangleMesh.create_coordinate_frame(size=1, origin=[0, 0, 0])#x红色,y绿色,z蓝色
# 可视化点云
o3d.visualization.draw_geometries([pcd, coord])
得到
若我们改为sigma_X = 1,sigma_Y = 1,则
发现中间确实为圆,与上述猜想一致。
若我们需要凹陷的缺陷,则改为A=-1即可。
保存
# 保存点云
o3d.io.write_point_cloud("flaw.pcd",pcd )
点云大小如下:
测试
【最详解】如何进行点云的凹凸缺陷检测(opene3D)
拿出之前写的凹凸检测代码开始测试,首先测试上述这种无噪音的。记得一定要根据点云的大小改radius = 0.5 #邻域半径,否则一点效果也没有
测试1 :领域曲率代码
参数如下:
结果如下:
意外的还算不错。
测试2:高斯曲率代码
也是改了radius =0.5。
果然结果还是这个更好。
加上噪点
在之前代码的基础上更改如下,并改成椭圆形缺陷。
结果:
测试1

测试2

发现在针对椭圆形的凹凸缺陷都不够灵敏了。
改进
一开始以为在使用邻近搜索中,用的方法不太好,用的是在球内的点搜索,或许换个方法就可以了。–2024.2.17
后发现修改为如下,依旧不太好。
k, idx, _ = kdtree.search_knn_vector_3d(cloud.points[i], num_knn)
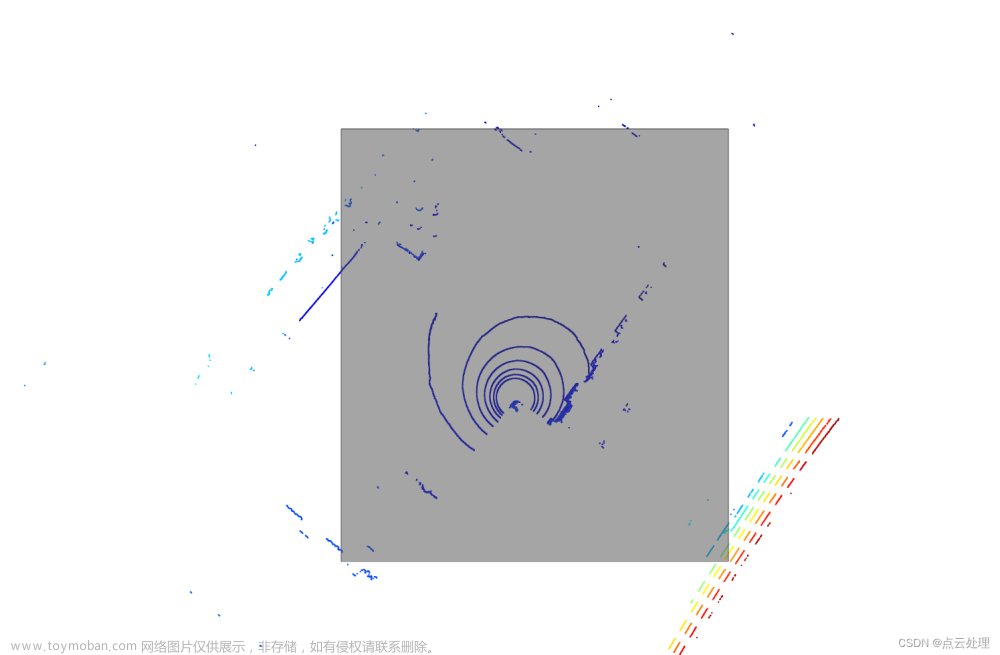
后发现在打印出数据中,数据太小,而定义为平面的数据宽泛太大,于是在测试2中改为如下文章来源:https://www.toymoban.com/news/detail-825834.html
limit_max = 1e-3
for i in range(len(curvatures)):
if -limit_max<curvatures[i][0] < limit_max and -limit_max<curvatures[i][1] <limit_max: #平坦
np.asarray(pcd.colors)[i] = [0, 0, 0]#黑
elif -limit_max<curvatures[i][0] < limit_max and curvatures[i][1] >limit_max: #凸
np.asarray(pcd.colors)[i] = [1, 0, 0]#红
elif -limit_max<curvatures[i][0] < limit_max and -limit_max<curvatures[i][1] <limit_max: #凹
np.asarray(pcd.colors)[i] = [0, 1, 0]#绿
elif curvatures[i][0] < -limit_max and curvatures[i][1] >limit_max: #鞍形脊 大部分凸,少部分凹
np.asarray(pcd.colors)[i] = [0, 0, 1]#蓝
elif curvatures[i][0] < -limit_max and curvatures[i][1] <-limit_max: #鞍形谷 大部分凹,少部分凸
np.asarray(pcd.colors)[i] = [0, 1, 1]#青
elif curvatures[i][0] > limit_max and curvatures[i][1] >limit_max: #峰
np.asarray(pcd.colors)[i] = [1, 0, 1]#紫
elif curvatures[i][0] > limit_max and curvatures[i][1] <-limit_max: #阱
np.asarray(pcd.colors)[i] = [1, 1, 0]#黄
结果便好很多了。 文章来源地址https://www.toymoban.com/news/detail-825834.html
文章来源地址https://www.toymoban.com/news/detail-825834.html
到了这里,关于【点云】生成有凹凸的平面的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!