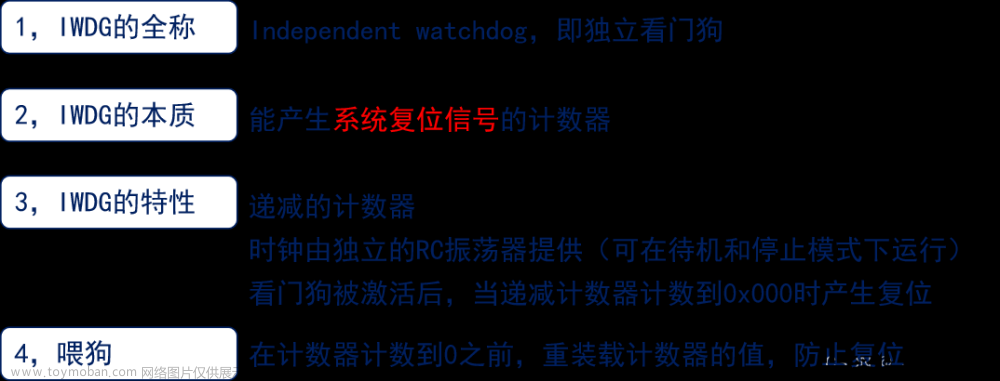
一、IWDG简介
看门狗(Watchdog)就是MCU上的一种特殊的定时器,用于监视系统的运行,在发生错误(例如程序出现死循环)时,能触发一个中断或产生系统复位,防止程序跑飞。STM32 有两个看门狗,一个是独立看门狗另外一个是窗口看门狗,独立看门狗号称宠物狗,窗口看门狗号称警犬。
二、独立看门狗的工作原理
独立看门狗(Independent Watchdog,IWDG)是由内部 32kHz 低速时钟 LSI 驱动的自由运行的 12 位递减计数器。LSI在时钟树上的位置如下图所示。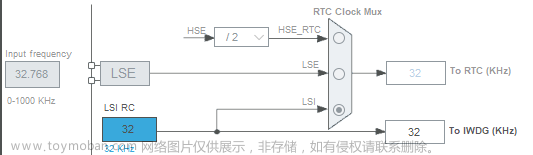
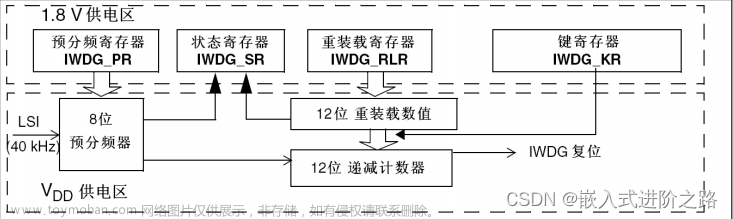
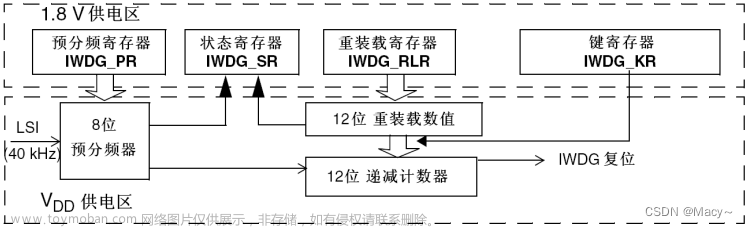
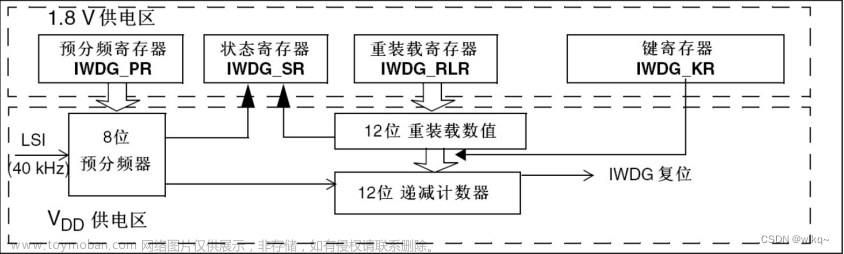
独立看门狗的内部功能框图如下图所示。
本节先分析独立看门狗的功能框图和它的应用;
独立看门狗用通俗一点的话来解释就是一个12 位的递减计数器,当计数器的值从某个值一直减到0 的时候,系统就会产生一个复位信号,即IWDG_RESET。如果在计数没减到0 之前,刷新了计数器的值的话,那么就不会产生复位信号,这个动作就是喂狗 。
独立看门狗一般用来检测和解决由程序引起的故障,比如一个程序正常运行的时间是50ms,在运行完这个段程序之后紧接着进行喂狗,我们设置独立看门狗的定时溢出时间为60ms,比我们需要监控的程序50ms 多一点,如果超过60ms 还没有喂狗,那就说明我们监控的程序出故障了,跑飞了,那么就会产生系统复位,让程序重新运行。
看门狗功能由VDD 电压域供电,在停止模式和待机模式下仍能工作。
1、独立看门狗时钟
独立看门狗的时钟由独立的RC 振荡器LSI 提供,即使主时钟发生故障它仍然有效,非常独立。LSI 的频率一般在30~60KHZ 之间,根据温度和工作场合会有一定的漂移,所以独立看门狗的定时时间并不一定非常精确,只适用于对时间精度要求比较低的场合。
2、计数器时钟
递减计数器的时钟由LSI 经过一个8 位的预分频器得到,在预分频器寄存器 IWDG_PR 里,有 PR[2:0]用于设置分频系数,分频系数从 4、8、16 到 256。
3、计数器
独立看门狗的计数器是一个12 位的递减计数器,最大值为0XFFF,当计数器减到0 时,会产生一个复位信号:IWDG_RESET,让程序重新启动运行,如果在计数器减到0 之前刷新了计数器的值的话,就不会产生复位信号,重新刷新计数器值的这个动作我们俗称喂狗。
4、重装载寄存器
重独立看门狗有一个重载寄存器IWDG RLR,可以设置一个 12位的重载值,例如 4000。在看门狗的递减计数器的值变为0之前,将IWDG_RLR 里的值重新载入看门狗计数器,就可以避免产生复位。超时时间Tout = (预分频因子*(重装载值+1))/LSI。关于计算超时时间在下面会详细介绍。
5、键寄存器
独立看门狗还有一个关键字寄存器 IWDG KR,其 KEY[15:0]是一个只可以写的关键字写入不同的关键字有不同的作用。
●写入 0xAAAA 时,重载寄存器 IWDG RLR 中的 12 位值就会被写入计数器,从而使计数器从头开始递减计数,避免系统复位。此操作称为刷新看门狗。
●写入 0x5555 后,才可以修改预分频器寄存器IWDG PR 和重载寄存器 IWDG_RLR 的内容。
●写入 0xCCCC 时,启动独立看门狗。
LSI时钟频率是 32kHz,看门狗最大重载值是4095(对应0xFFF),根据预分频系数可以计算出IWDG 的最长超时(timeout),如下表所示。
6、状态寄存器
状态寄存器SR 只有位0:PVU 和位1:RVU 有效,这两位只能由硬件操作,软件操作不了。RVU:看门狗计数器重装载值更新,硬件置1 表示重装载值的更新正在进行中,更新完毕之后由硬件清0。PVU: 看门狗预分频值更新,硬件置’1’指示预分频值的更新正在进行中,当更新完成后,由硬件清0。所以只有当RVU/PVU 等于0 的时候才可以更新重装载寄存器/预分频寄存器。
三、驱动函数
独立看门狗的驱动函数比较只有2个常规函数和几个宏函数。独立看门狗没有中断。
初始化函数HAL IWDG Init()
结构体 IWDG HandleTypeDef的定义如下,各成员变量的意义见注释:
typedef struct
{
IWDG_TypeDef *Instance; /*!< IWDG寄存器基地 */
IWDG_InitTypeDef Init; /*!< IWDG 的参数 */
} IWDG_HandleTypeDef;
其中的成员变量 Init 是结构体类型 IWDG_ImitTypeDef,它定义了IWDG的参数,这个结构体定义如下,各成员变量的意义见注释:
typedef struct
{
uint32_t Prescaler; /*!< IWDG 预分频系数,也就是预分频寄存器IWDG_PR里的 PR[2:0] */
uint32_t Reload; /*!< IWDG计数器重载值,也就是重载寄存器IWDG_RLR 的值 */
} IWDG_InitTypeDef;
初始化函数HAL IWDG Init()
HAL IWDG Refresh()用于刷新看门狗,就是将重载寄存器IWDG_RLR 的值重新载入看门狗计数器,避免产生系统复位。函数HAL_IWDG _Refresh()的原型定义如下,只需使用IWDC对象指针作为函数参数:
HAL_StatusTypeDef HAL IWDG Refresh(IWDG HandleTypeDef *hiwdg);
其他宏函数
文件 stm32f4xx hal iwdg.h 还有几个主要的宏函数,这些函数的输入参数__HANDLE__是独立看门狗对象指针。
●HAL_IWDGSTART(HANDLE),启动独立看门狗,就是向关键字寄存器IWDG_KR写入 0x0000CCCc。
●HAL_IWDG_RELOADCOUNTER(HANDLE),重置看门狗计数器的值,就是向关键字寄存器 IWDG_KR 写入 0x0000AAAA,这会导致重载寄存器IWDG_RLR中的值载入看门狗计数器。这个宏函数与函数HAL_IWDG_RefreshO的功能相同。
●IWDG_ENABLE_WRITE ACCESS(HANDLE),使预分频寄存器IWDG_PR 和重载存器 IWDG_RLR 变为可写的,其代码就是向关键字寄存器 IWDG_KR 写入 0x00005555。
●IWDG_DISABLE_WRITEACCESS(HANDLE),使预分频寄存器IWDG_PR 和重载寄存器 IWDG_RLR 变为不可写的,其代码就是向关键字寄存器 IWDG KR 写入0x00000000。
四、超时时间计算

通过查阅多个文档和网上各种资料,有两种计算办法
两种办法大家酌情选择
第一种办法
Tout = ( (4*2^PR) * (RLV+1) )/ LSI;其中PR为上图中预分频系数对应的PR[2:0]位、RLV为重装载值(0 ~ 4095)、LSI为内部低速时钟,也就是驱动IWDG的时钟,F1一般LSI为40kHz ;
示例:
以F1为例,LSI为40kHz、预分频系数为8,PR为1、RLV为0和4095
最短时间:RLV为0,Tout = ((4*2^PR)*(RLV+1)) / LSI = ((4*2)*(0+1)) / 40000 = 0.0002s = 0.2ms
最长时间:RLV为4095,Tout = ((4*2^PR)*(RLV+1)) / LSI = ((4*2)*(4095+1)) / 40000 = 0.8192s = 8192ms
第二种办法(推荐)
Tout = (预分频系数 * (重装载值+1)) / LSI;其中预分频系数和重装载值为直接设置的,后面结合配置STM32Cube MX会很方便;LSI为内部低速时钟,F1一般为40kHz;
示例:
以F1为例,LSI为40kHz、预分频系数为8,重装载值为0和4095
最短时间:重装载值为0,Tout = (预分频系数*重装载值) / LSI = (8*1) / 40000 = 0.0002s = 0.2ms
最长时间:重装载值为4095,Tout = (预分频系数*重装载值) / LSI = (8*4096) / 40000 =0.8192s = 8192ms
这两种办法都可以算出上表中的数值,其实仔细分析这两种办法,原理其实都一样,为例方便算一点推荐使用第二种办法。
四、STM32Cube MX 配置
基础STM32Cube MX的配置参考这篇博客:STM32 CubeMx教程 – 基础知识及配置使用教程
配置RCC,使用外部晶振模式
配置SYS,debug模式选择Serial Wire
参数设置部分只有两个参数:
配置IWDG,先启用独立看门狗,配置预分频系数为32,重装载值为124;
Tout = (32*(124+1))/ 40000 = 100ms
使用一个串口用来打印调试信息,设置为异步通信模式
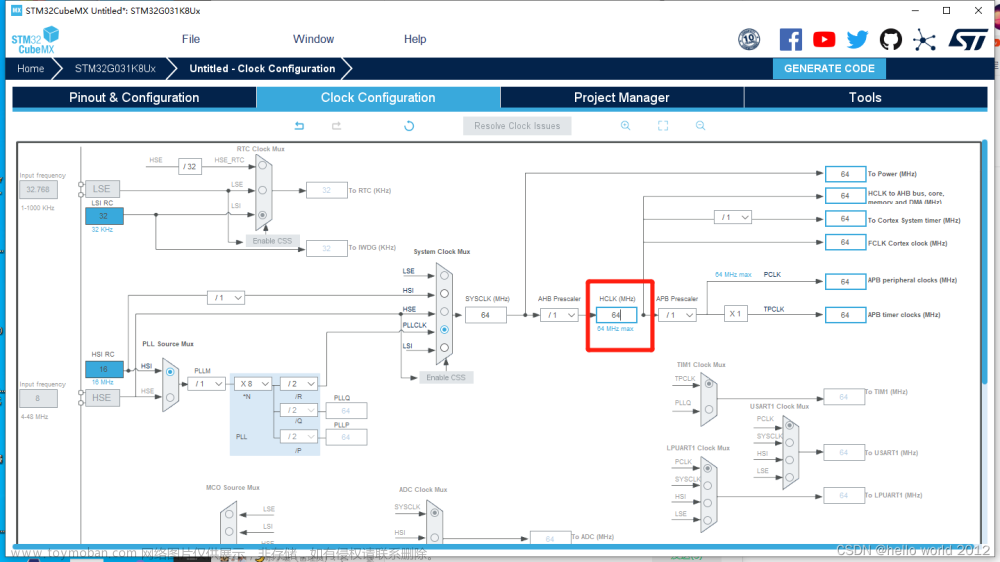
配置时钟树,从图上可以看到里面默认的LSI RC振荡时钟 40kHz ,LSI时钟配置到了IWDG 文章来源:https://www.toymoban.com/news/detail-826849.html
文章来源:https://www.toymoban.com/news/detail-826849.html
涉及到IWDG(独立看门狗)的函数有两个:文章来源地址https://www.toymoban.com/news/detail-826849.html
MX_IWDG_Init(); //独立看门狗初始化
HAL_IWDG_Refresh(&hiwdg); //喂狗
到了这里,关于STM32 HAL库 STM32CubeMX -- IWDG(独立看门狗)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!