无人机动力系统中的电机、电调和桨叶技术都是非常重要的部分,以下是对这些技术的详解:
无人机电机
在无人机动力系统中,电机是将电能转化为机械能的关键部件。其主要作用是产生旋转力矩,驱动螺旋桨的旋转,从而实现无人机的飞行。无刷电机是无人机中常用的一种电机,它具有效率高、维护成本低、寿命长等优点。
无刷电机
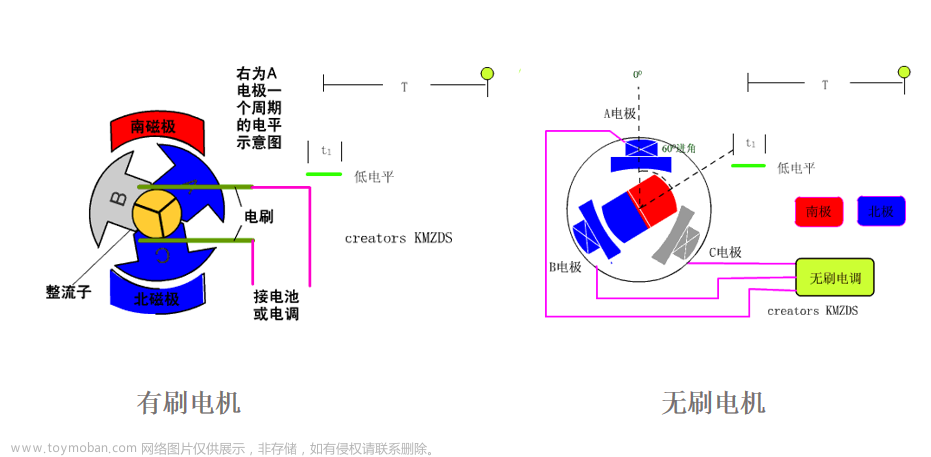
常见模型用有刷、无感无刷、有感无刷电机对比。

1、没有碳刷,理论上转子无需和外界有导体上的链接。
2、在运行过程中,无刷电机的转速是靠交流电的频率决定的,所以频率越高无刷电机可以转得越快。
3、无刷电机的转速是严格按照KV值设定的,1000KV表示每一伏特供电,电机转速加快1000转。所以电压为5V时,1000kv的无刷电机转速5000rpm。
4、在运行过程中,同样转速电机的扭力是靠电调输出的电流强度决定的,电流越大扭力越大。(理想状态下,我们“聪明”的无刷电调会不断“监测”我们的电机是否需要更大的扭力,同时也会保证扭力不过剩,以免浪费)
无刷电机命名

相对有刷电机,无刷电机的命名好理解很多,只和它的尺寸有关。电机的尺寸取决于定子的大小,由一个四位数字来表示。例如2205(或写成22×05)电机,前两个数字代表定子直径(单位mm),后两个数字代表定子高度(单位mm),因此2205电机表示电机定子直径是22mm,定子高度为5mm。


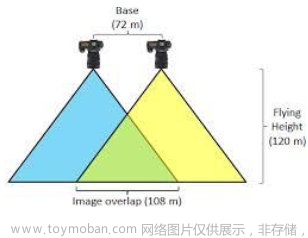
桨叶与轴距选择
每个旋翼之间旋转产生的涡流相互不影响,同时保持旋翼结构紧凑,推出以下公式:


无人机电调
电调,全称为电子调速器,英文简称为ESC。在无人机动力系统中,电调的作用主要是调节电机的转速,控制无人机的飞行速度和高度。电调通常与遥控设备或飞控系统相连接,根据输入的信号调整电机的转速,从而实现无人机的稳定飞行和精确控制。

电调的主要参数指标有:
(1)最大持续/峰值电流
无刷电调最主要的参数是电调的功率,通常以安数A来表示,如10A、 20A、30A。不同电机需要配备不同安数的电调,安数不足会导致电调甚至电机烧毁。最大持续电流指的是在正常工作模式下的持续输出电流, 峰值电流指的是电调能承受的最大瞬时电流。
(2)电压范围
电调能够正常工作所允许输入的电压范围也是非常重要的参数。一般在电调说明书上可以看到标注例如“3-4S LiPo”字样,表示这个电调适用于3到4节电芯串联的锂聚合物电池,也就是说它的电压范围为11.1V~14.8V。
(3)可编程性
通过内部参数的设置,可以让电调最佳的性能。

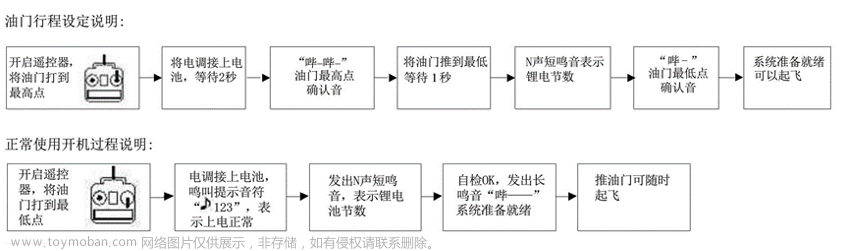
油门行程很关键:
直接关系PWM输出的物理意义。
PWM精度要设置恰当,在电调允许范围内尽可能高。
安全起见,电调初始化时必须取下螺旋桨!
PWM输出范围:0~1000 与 0~100 的控制精度区别。
无人机桨叶
桨叶是无人机动力系统中直接与空气接触的部分,其形状和材料对无人机的性能有着重要影响。螺旋桨的尺寸、形状、材料和设计都会影响其拉力和效率,进而影响无人机的飞行性能。桨叶的旋转速度也会影响无人机的飞行速度和稳定性。对于无人机来说,选择合适的桨叶非常重要。
作用
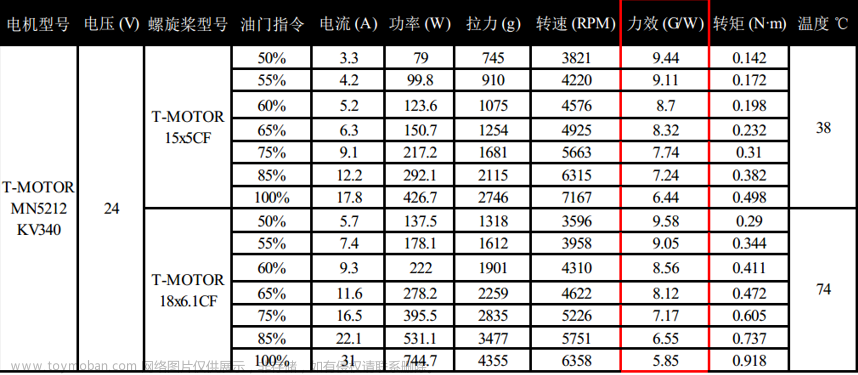
螺旋桨是直接产生多旋翼运动所需的力与力矩的部件。合适的螺旋桨对提高多旋翼性能和效率有着直接的影响。
考虑到电机效率会随螺旋桨尺寸变化而变化,所以合理匹配的螺旋桨可以使电机工作在更高效的状态,从而保证在产生相同拉力情况下消耗更少的能量,进而提高续航时间。
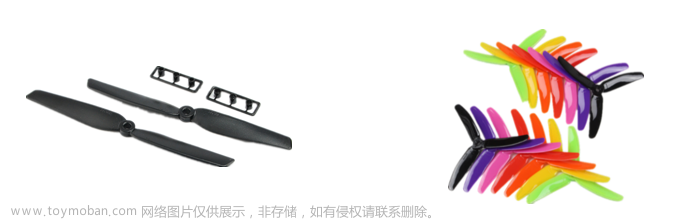
提供同样拉力的情况下,两桨叶比三桨叶尺寸大,两组正牙,两组反牙抑制自旋转。
桨叶型号含义(例1045)
1045的含义是,螺旋桨的直径是10英寸,螺距是4.5英寸。螺距是什么呢?假设螺旋桨在一种不能流动的介质中旋转,那么螺旋桨每转一圈,就会向前进一个距离,就称为螺距或桨距(Propeller Pitch)。
桨叶材质及选型
一般有碳纤维、塑料、木制等材料。碳纤维桨比塑料桨贵几乎2倍。碳纤维桨刚性较好,因此产生振动和噪音较少,较塑料桨,更轻,强度更大,适用于高KV值电机,控制响应比较迅速。然而,当发生坠机时,因为碳纤维桨刚性强,电机将吸收大部分的冲击力。木桨一般更重,也更贵,比较适用于较大载重的多旋翼。
 文章来源:https://www.toymoban.com/news/detail-827105.html
文章来源:https://www.toymoban.com/news/detail-827105.html
无人机动力系统中的电机、电调和桨叶技术都是至关重要的。它们之间的匹配和选择对于无人机的性能和稳定性都有着重要的影响。文章来源地址https://www.toymoban.com/news/detail-827105.html
到了这里,关于无人机技术,无人机动力系统知识,电机、电调、桨叶技术详解的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!