一、准备工作:
有关CUBEMX的初始化配置,参见我的另一篇blog:【STM32+HAL】CUBEMX初始化配置
二、所用工具:
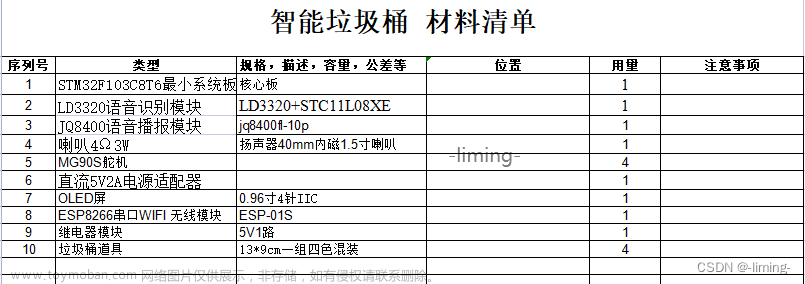
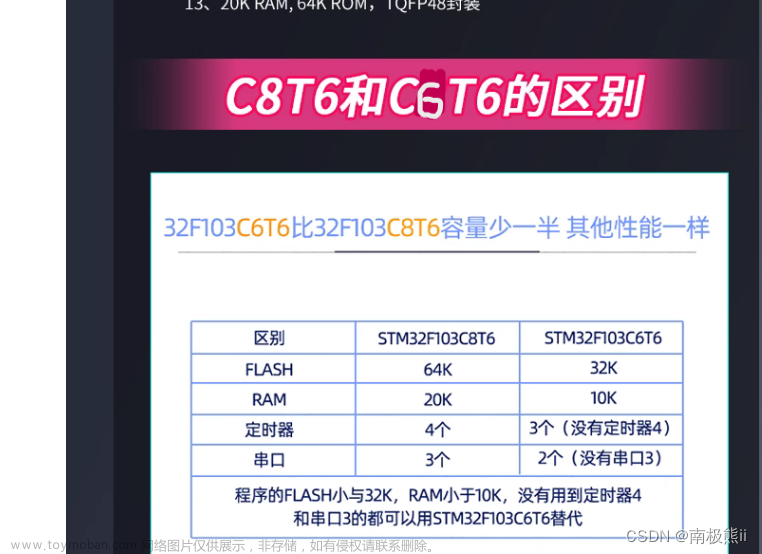
1、芯片: STM32F103C6T6(同C8T6)
2、STM32CubeMx软件
3、语言识别模块:LD3320(SPI版)
三、实现功能:
实现串口打印语音输入
四、HAL配置步骤:
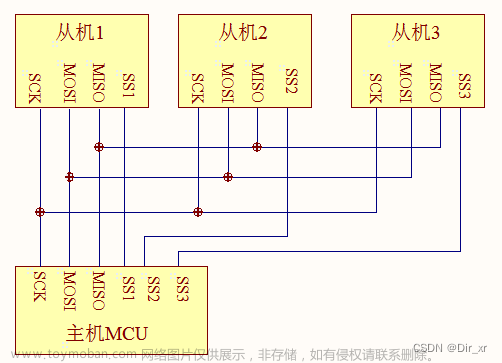
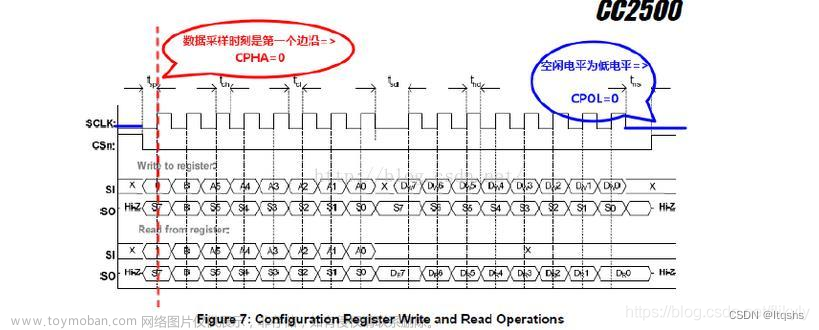
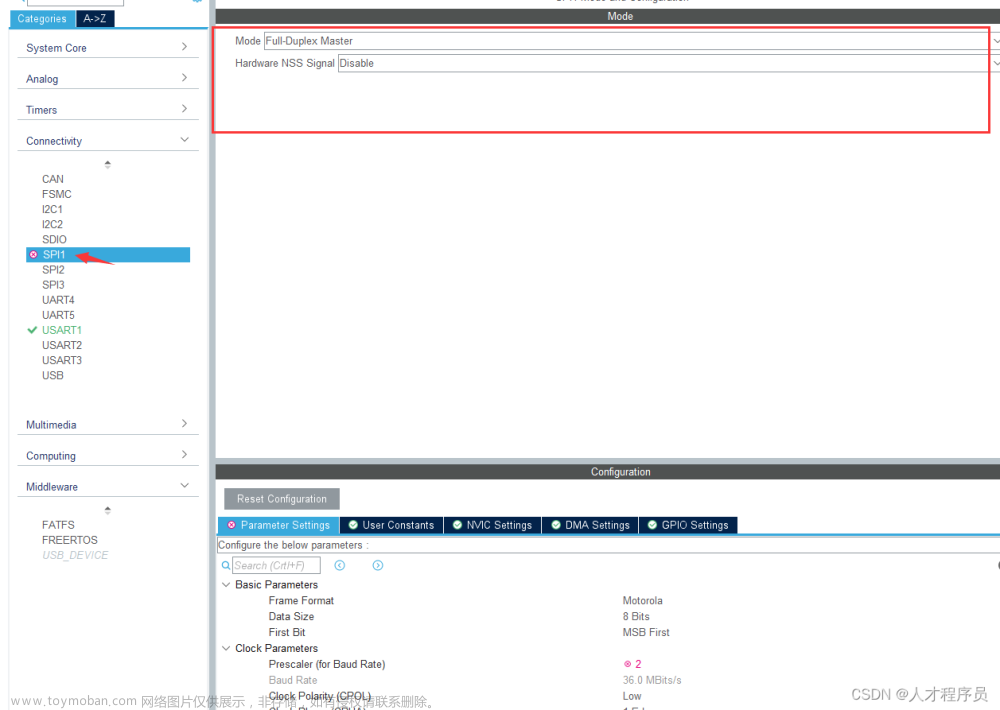
1、SPI功能开启

2、IO口配置

3、中断配置

至此,HAL库配置完成
五、硬件连接:
接线:
LD3320:
LD3320_CS_Pin GPIO_PIN_A2
LD3320_SCK_Pin GPIO_PIN_A5
LD_MI_Pin GPIO_PIN_A6
LD3320_MOSI_Pin GPIO_PIN_A7
LD3320_IRQ_Pin GPIO_PIN_B1
LD3320_WR_Pin GND
LD3320_RST_Pin GPIO_PIN_B10
调试器:
3V3 -> 3V3
GND -> GND
TMS -> SWIO
TCK -> SWCLK
串口:
U_RX -> PA9
U_TX -> PA10六、KEIL填写代码:
1、LD3320.C
#include "LD3320.h"
#include <stdio.h>
#include "delay.h"
#include "spi.h"
/************************************************************************************
// nAsrStatus 用来在main主程序中表示程序运行的状态,不是LD3320芯片内部的状态寄存器
// LD_ASR_NONE: 表示没有在作ASR识别
// LD_ASR_RUNING: 表示LD3320正在作ASR识别中
// LD_ASR_FOUNDOK: 表示一次识别流程结束后,有一个识别结果
// LD_ASR_FOUNDZERO: 表示一次识别流程结束后,没有识别结果
// LD_ASR_ERROR: 表示一次识别流程中LD3320芯片内部出现不正确的状态
********************************************************************************
*/
#define USE_HAL_LIB//使用HAL库
uint8_t nAsrStatus=0;
uint8_t nAsrRes=0;
uint8_t flag=0;
///用户修改
extern uint8_t nAsrStatus;
uint8_t nLD_Mode=LD_MODE_IDLE;
uint8_t ucRegVal;
#define LD3320_SPI hspi1
/*硬件SPI读写*/
uint8_t SPI_RreadWrite_Data(uint8_t *tx_data, uint8_t len)
{
uint8_t rx_data[len];
HAL_SPI_TransmitReceive(&LD3320_SPI,tx_data,rx_data,len,0XFFFF);
return rx_data[len-1];
}
void LD3320_main(void)
{
nAsrStatus = LD_ASR_NONE; // 初始状态:没有在作ASR
//CS_LOW;
printf("运行程序\r\n");
while(1)
{
switch(nAsrStatus)
{
case LD_ASR_RUNING:
case LD_ASR_ERROR:
break;
case LD_ASR_NONE:
{
nAsrStatus=LD_ASR_RUNING;
if (RunASR()==0) /* 启动一次ASR识别流程:ASR初始化,ASR添加关键词语,启动ASR运算*/
{
nAsrStatus = LD_ASR_ERROR;
}
break;
}
case LD_ASR_FOUNDOK: /* 一次ASR识别流程结束,去取ASR识别结果*/
{
nAsrRes = LD_GetResult(); /*获取结果*/
User_Modification(nAsrRes);
nAsrStatus = LD_ASR_NONE;
break;
}
case LD_ASR_FOUNDZERO:
default:
{
nAsrStatus = LD_ASR_NONE;
break;
}
}
}
}
uint8_t LD3320_Init(void)
{
// GPIO_InitTypeDef GPIO_InitStructure;
// __HAL_RCC_GPIOA_CLK_ENABLE();
// __HAL_RCC_GPIOB_CLK_ENABLE();
//
RCC_APB2PeriphClockCmd(LD3320_SDCK_GPIO_CLK|LD3320_SDO_GPIO_CLK|LD3320_SDI_GPIO_CLK|\
LD3320_SCS_GPIO_CLK|LD3320_RSTB_GPIO_CLK|LD3320_IRQ_GPIO_CLK,ENABLE); //使能PA端口时钟 | RCC_APB2Periph_AFIO
//GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);//要先开时钟,再重映射;关闭jtag,保留swd。
//
//
// GPIO_InitStructure.Pin = GPIO_PIN_5; //端口配置
// GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出
// GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;
// HAL_GPIO_Init(GPIOA,&GPIO_InitStructure);
//
// GPIO_InitStructure.Pin = GPIO_PIN_7; //端口配置
// GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出
// GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;
// HAL_GPIO_Init(GPIOA,&GPIO_InitStructure);
//
// GPIO_InitStructure.Pin = GPIO_PIN_4; //端口配置
// GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出
// GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;
// HAL_GPIO_Init(GPIOA,&GPIO_InitStructure);
//
// GPIO_InitStructure.Pin = GPIO_PIN_15; //端口配置
// GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出
// GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;
// HAL_GPIO_Init(GPIOB,&GPIO_InitStructure);
//
// GPIO_InitStructure.Pin = GPIO_PIN_6; //端口配置
// GPIO_InitStructure.Mode = GPIO_MODE_INPUT; //推挽输出
// GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;
// HAL_GPIO_Init(GPIOA,&GPIO_InitStructure);
//
// GPIO_InitStructure.Pin = GPIO_PIN_13; //端口配置
// GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出
// GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;
// HAL_GPIO_Init(GPIOB,&GPIO_InitStructure);
//
// HAL_GPIO_WritePin(LD3320_WR_GPIO_Port,LD3320_WR_Pin,GPIO_PIN_RESET);//拉低WR引脚
// /* GPIO Ports Clock Enable */
// __HAL_RCC_GPIOB_CLK_ENABLE();
// /*Configure GPIO pin : PB12 */
// GPIO_InitStructure.Pin = GPIO_PIN_12;
// GPIO_InitStructure.Mode = GPIO_MODE_IT_FALLING;
// HAL_GPIO_Init(GPIOB, &GPIO_InitStructure);
//
// /* EXTI interrupt init*/
// HAL_NVIC_SetPriority(EXTI15_10_IRQn,2,0);
// HAL_NVIC_EnableIRQ(EXTI15_10_IRQn);
HAL_Delay(500);
HAL_GPIO_WritePin(LD3320_RST_GPIO_Port,LD3320_RST_Pin,GPIO_PIN_SET);//拉低WR引脚
HAL_GPIO_WritePin(LD3320_CS_GPIO_Port,LD3320_CS_Pin,GPIO_PIN_SET);//拉低WR引脚
HAL_GPIO_WritePin(LD3320_WR_GPIO_Port,LD3320_WR_Pin,GPIO_PIN_RESET);//拉低WR引脚
return LD3320_Check();
}
/***********************************************************
* 名 称:用户执行函数
* 功 能:识别成功后,执行动作可在此进行修改
* 入口参数: 无
* 出口参数:无
* 说 明:
**********************************************************/
void User_Modification(uint8_t dat)
{
if(dat)
{
switch(nAsrRes) /*对结果执行相关操作,客户修改*/
{
case CODE_DMCS: /*命令“代码测试”*/
printf(" 代码测试 识别成功\r\n"); /*text.....*/
break;
case CODE_CSWB: /*命令“测试完毕”*/
printf(" 测试完毕 识别成功\r\n"); /*text.....*/
break;
case CODE_1KL1: /*命令“北京”*/
printf(" 北京 识别成功\r\n"); /*text.....*/
break;
case CODE_1KL2: /*命令“上海”*/
printf(" 上海 识别成功\r\n"); /*text.....*/
break;
case CODE_1KL3: /*命令“开灯”*/
printf(" 开灯 识别成功\r\n"); /*text.....*/
break;
case CODE_1KL4: /*命令“关灯”*/
printf(" 关灯 识别成功\r\n"); /*text.....*/
break;
case CODE_2KL1: /*命令“....”*/
printf(" 广州 识别成功\r\n"); /*text.....*/
break;
case CODE_2KL2: /*命令“....”*/
printf(" 深圳 识别成功\r\n"); /*text.....*/
break;
case CODE_2KL3: /*命令“....”*/
printf(" 向左转 识别成功\r\n"); /*text.....*/
break;
case CODE_2KL4: /*命令“....”*/
printf(" 向右转 识别成功\r\n"); /*text.....*/
break;
case CODE_3KL1: /*命令“....”*/
printf(" 打开空调 识别成功\r\n"); /*text.....*/
break;
case CODE_3KL2: /*命令“....”*/
printf(" 关闭空调 识别成功\r\n"); /*text.....*/
break;
case CODE_5KL1: /*命令“....”*/
printf(" 后退 识别成功"); /*text.....*/
break;
// case CODE_3KL4: /*命令“....”*/
// printf("\"代码测试\"识别成功"); /*text.....*/
// break;
//
// case CODE_4KL1: /*命令“....”*/
// printf("O"); /*text.....*/
// break;
// case CODE_4KL2: /*命令“....”*/
// printf("P"); /*text.....*/
// break;
// case CODE_4KL3: /*命令“....”*/
// printf("Q"); /*text.....*/
// break;
// case CODE_4KL4: /*命令“....”*/
// printf("R"); /*text.....*/
// break;
default:break;
}
}
}
/************************************************************************
功能描述: 复位LD模块
入口参数: none
返 回 值: none
其他说明: none
**************************************************************************/
void LD_Reset(void)
{
RST_HIGH;
HAL_Delay(5);
RST_LOW;
HAL_Delay(5);
RST_HIGH;
HAL_Delay(5);
CS_LOW;
HAL_Delay(5);
CS_HIGH;
HAL_Delay(5);
}
/************************************************************************
功能描述: LD模块命令初始化
入口参数: none
返 回 值: none
其他说明: 该函数为出厂配置,一般不需要修改;
有兴趣的客户可对照开发手册根据需要自行修改。
**************************************************************************/
void LD_Init_Common(void)
{
LD_ReadReg(0x06);
LD_WriteReg(0x17, 0x35);
HAL_Delay(5);
LD_ReadReg(0x06);
LD_WriteReg(0x89, 0x03);
HAL_Delay(5);
LD_WriteReg(0xCF, 0x43);
HAL_Delay(5);
LD_WriteReg(0xCB, 0x02);
/*PLL setting*/
LD_WriteReg(0x11, LD_PLL_11);
if (nLD_Mode == LD_MODE_MP3)
{
LD_WriteReg(0x1E,0x00);
LD_WriteReg(0x19, LD_PLL_MP3_19);
LD_WriteReg(0x1B, LD_PLL_MP3_1B);
LD_WriteReg(0x1D, LD_PLL_MP3_1D);
}
else
{
LD_WriteReg(0x1E,0x00);
LD_WriteReg(0x19, LD_PLL_ASR_19);
LD_WriteReg(0x1B, LD_PLL_ASR_1B);
LD_WriteReg(0x1D, LD_PLL_ASR_1D);
}
HAL_Delay(5);
LD_WriteReg(0xCD, 0x04);
LD_WriteReg(0x17, 0x4c);
HAL_Delay(5);
LD_WriteReg(0xB9, 0x00);
LD_WriteReg(0xCF, 0x4F);
LD_WriteReg(0x6F, 0xFF);
}
/************************************************************************
功能描述: LD模块 ASR功能初始化
入口参数: none
返 回 值: none
其他说明: 该函数为出厂配置,一般不需要修改;
有兴趣的客户可对照开发手册根据需要自行修改。
**************************************************************************/
void LD_Init_ASR(void)
{
nLD_Mode=LD_MODE_ASR_RUN;
LD_Init_Common();
LD_WriteReg(0xBD, 0x00);
LD_WriteReg(0x17, 0x48);
HAL_Delay(5);
LD_WriteReg(0x3C, 0x80);
LD_WriteReg(0x3E, 0x07);
LD_WriteReg(0x38, 0xff);
LD_WriteReg(0x3A, 0x07);
LD_WriteReg(0x40, 0);
LD_WriteReg(0x42, 8);
LD_WriteReg(0x44, 0);
LD_WriteReg(0x46, 8);
HAL_Delay(5);
}
/************************************************************************
功能描述: 中断处理函数
入口参数: none
返 回 值: none
其他说明: 当LD模块接收到音频信号时,将进入该函数,
判断识别是否有结果,如果没有从新配置寄
存器准备下一次的识别。
**************************************************************************/
void ProcessInt(void)
{
uint8_t nAsrResCount=0;
ucRegVal = LD_ReadReg(0x2B);
LD_WriteReg(0x29,0) ;
LD_WriteReg(0x02,0) ;
if((ucRegVal & 0x10)&&LD_ReadReg(0xb2)==0x21&&LD_ReadReg(0xbf)==0x35) /*识别成功*/
{
nAsrResCount = LD_ReadReg(0xba);
if(nAsrResCount>0 && nAsrResCount<=4)
{
nAsrStatus=LD_ASR_FOUNDOK;
}
else
{
nAsrStatus=LD_ASR_FOUNDZERO;
}
} /*没有识别结果*/
else
{
nAsrStatus=LD_ASR_FOUNDZERO;
}
LD_WriteReg(0x2b, 0);
LD_WriteReg(0x1C,0);/*写0:ADC不可用*/
LD_WriteReg(0x29,0);
LD_WriteReg(0x02,0);
LD_WriteReg(0x2B,0);
LD_WriteReg(0xBA,0);
LD_WriteReg(0xBC,0);
LD_WriteReg(0x08,1); /*清除FIFO_DATA*/
LD_WriteReg(0x08,0); /*清除FIFO_DATA后 再次写0*/
}
/************************************************************************
功能描述: 检测LD模块是否空闲
入口参数: none
返 回 值: flag:1-> 空闲
其他说明: none
**************************************************************************/
uint8_t LD_Check_ASRBusyFlag_b2(void)
{
uint8_t j,i;
uint8_t flag = 0;
for (j=0; j<5; j++)
{
i=LD_ReadReg(0xb2);
if ( i== 0x21)
{
flag = 1;
break;
}
HAL_Delay(20);
}
return flag;
}
/************************************************************************
功能描述: 启动ASR
入口参数: none
返 回 值: none
其他说明: none
**************************************************************************/
void LD_AsrStart(void)
{
LD_Init_ASR();
}
/************************************************************************
功能描述: 运行ASR
入口参数: none
返 回 值: 1:启动成功
其他说明: none
**************************************************************************/
uint8_t LD_AsrRun(void)
{
LD_WriteReg(0x35, MIC_VOL);
LD_WriteReg(0x1C, 0x09);
LD_WriteReg(0xBD, 0x20);
LD_WriteReg(0x08, 0x01);
HAL_Delay(5);
LD_WriteReg(0x08, 0x00);
HAL_Delay(5);
if(LD_Check_ASRBusyFlag_b2() == 0)
{
return 0;
}
LD_WriteReg(0xB2, 0xff);
LD_WriteReg(0x37, 0x06);
HAL_Delay(5);
LD_WriteReg(0x37, 0x06);
HAL_Delay(5);
LD_WriteReg(0x1C, 0x0b);
LD_WriteReg(0x29, 0x10);
LD_WriteReg(0xBD, 0x00);
return 1;
}
/************************************************************************
功能描述: 向LD模块添加关键词
入口参数: none
返 回 值: flag:1->添加成功
其他说明: 用户修改.
1、根据如下格式添加拼音关键词,同时注意修改sRecog 和pCode 数组的长度
和对应变了k的循环置。拼音串和识别码是一一对应的。
2、开发者可以学习"语音识别芯片LD3320高阶秘籍.pdf"中
关于垃圾词语吸收错误的用法,来提供识别效果。
**************************************************************************/
uint8_t LD_AsrAddFixed(void)
{
uint8_t k, flag;
uint8_t nAsrAddLength;
#define DATE_A 14 //数组二维数值
#define DATE_B 20 //数组一维数值
uint8_t sRecog[DATE_A][DATE_B] = {
"xiao jie",\
"dai ma ce shi",\
"ce shi wan bi",\
"bei jing",\
"shang hai",\
"kai deng",\
"guan deng",\
"guang zhou",\
"shen zhen",\
"xiang zuo zhuan",\
"xiang you zhuan",\
"da kai kong tiao",\
"guan bi kong tiao",\
"hou tui",\
}; /*添加关键词,用户修改*/
uint8_t pCode[DATE_A] = {
CODE_CMD,\
CODE_DMCS,\
CODE_CSWB,\
CODE_1KL1,\
CODE_1KL2,\
CODE_1KL3,\
CODE_1KL4,\
CODE_2KL1,\
CODE_2KL2,\
CODE_2KL3,\
CODE_2KL4,\
CODE_3KL1,\
CODE_3KL2,\
CODE_5KL1,
}; /*添加识别码,用户修改*/
flag = 1;
for (k=0; k<DATE_A; k++)
{
if(LD_Check_ASRBusyFlag_b2() == 0)
{
flag = 0;
break;
}
LD_WriteReg(0xc1, pCode[k] );
LD_WriteReg(0xc3, 0 );
LD_WriteReg(0x08, 0x04);
HAL_Delay(1);
LD_WriteReg(0x08, 0x00);
HAL_Delay(1);
for (nAsrAddLength=0; nAsrAddLength<DATE_B; nAsrAddLength++)
{
if (sRecog[k][nAsrAddLength] == 0)
break;
LD_WriteReg(0x5, sRecog[k][nAsrAddLength]);
}
LD_WriteReg(0xb9, nAsrAddLength);
LD_WriteReg(0xb2, 0xff);
LD_WriteReg(0x37, 0x04);
}
return flag;
}
/************************************************************************
功能描述: 运行ASR识别流程
入口参数: none
返 回 值: asrflag:1->启动成功, 0—>启动失败
其他说明: 识别顺序如下:
1、RunASR()函数实现了一次完整的ASR语音识别流程
2、LD_AsrStart() 函数实现了ASR初始化
3、LD_AsrAddFixed() 函数实现了添加关键词语到LD3320芯片中
4、LD_AsrRun() 函数启动了一次ASR语音识别流程
任何一次ASR识别流程,都需要按照这个顺序,从初始化开始
**************************************************************************/
uint8_t RunASR(void)
{
uint8_t i=0;
uint8_t asrflag=0;
for (i=0; i<5; i++) // 防止由于硬件原因导致LD3320芯片工作不正常,所以一共尝试5次启动ASR识别流程
{
LD_AsrStart();
HAL_Delay(5);
if (LD_AsrAddFixed()==0)
{
LD_Reset(); // LD3320芯片内部出现不正常,立即重启LD3320芯片
HAL_Delay(5); // 并从初始化开始重新ASR识别流程
continue;
}
delay_us(5);
if (LD_AsrRun() == 0)
{
LD_Reset(); // LD3320芯片内部出现不正常,立即重启LD3320芯片
HAL_Delay(5); // 并从初始化开始重新ASR识别流程
continue;
}
asrflag=1;
break; // ASR流程启动成功,退出当前for循环。开始等待LD3320送出的中断信号
}
return asrflag;
}
/************************************************************************
功能描述: 获取识别结果
入口参数: none
返 回 值: LD_ReadReg(0xc5 ); 读取内部寄存器返回识别码。
其他说明: none
**************************************************************************/
uint8_t LD_GetResult(void)
{
return LD_ReadReg(0xc5 );
}
/*写寄存器*/
void LD_WriteReg(uint8_t address,uint8_t dataout)
{
#ifndef USE_HAL_LIB
uint8_t i = 0;
uint8_t command=0x04;
SCS = 0;
delay_us(1);
//write command
for (i=0;i < 8; i++)
{
if (command & 0x80)
SDI = 1;
else
SDI = 0;
delay_us(1);
SDCK = 0;
command = (command << 1);
delay_us(1);
SDCK = 1;
}
//write address
for (i=0;i < 8; i++)
{
if (address & 0x80)
SDI = 1;
else
SDI = 0;
delay_us(1);
SDCK = 0;
address = (address << 1);
delay_us(1);
SDCK = 1;
}
//write data
for (i=0;i < 8; i++)
{
if (dataout & 0x80)
SDI = 1;
else
SDI = 0;
delay_us(1);
SDCK = 0;
dataout = (dataout << 1);
delay_us(1);
SDCK = 1;
}
delay_us(1);
SCS = 1;
#else
uint8_t tx_data[3];
CS_LOW;
delay_us(1);
tx_data[0] = 0x04;
tx_data[1] = address;
tx_data[2] = dataout;
SPI_RreadWrite_Data(tx_data,3);
delay_us(1);
CS_HIGH;
#endif
}
/*读寄存器*/
uint8_t LD_ReadReg(uint8_t address)
{
#ifndef USE_HAL_LIB
uint8_t i = 0;
uint8_t datain =0 ;
uint8_t temp = 0;
uint8_t command=0x05;
SCS = 0;
delay_us(1);
//write command
for (i=0;i < 8; i++)
{
if (command & 0x80)
SDI = 1;
else
SDI = 0;
delay_us(1);
SDCK = 0;
command = (command << 1);
delay_us(1);
SDCK = 1;
}
//write address
for (i=0;i < 8; i++)
{
if (address & 0x80)
SDI = 1;
else
SDI = 0;
delay_us(1);
SDCK = 0;
address = (address << 1);
delay_us(1);
SDCK = 1;
}
delay_us(1);
//Read
for (i=0;i < 8; i++)
{
datain = (datain << 1);
temp = SDO;
delay_us(1);
SDCK = 0;
if (temp == 1)
datain |= 0x01;
delay_us(1);
SDCK = 1;
}
delay_us(1);
SCS = 1;
return datain;
#else
uint8_t rx_data;
uint8_t tx_data[3];
CS_LOW;
delay_us(1);
tx_data[0] = 0x05;
tx_data[1] = address;
tx_data[2] = 0x00;
rx_data = SPI_RreadWrite_Data(tx_data,3);
delay_us(1);
CS_HIGH;
return rx_data;
#endif
}
/************************************************************************
功能描述: 模块检测(检查寄存器的读写是否正确)
入口参数: none
返 回 值:成功返回 0 ,失败返回1
其他说明: none
**************************************************************************/
uint8_t LD3320_Check(void)
{
uint8_t flag = 1;
LD_Reset();//语音复位
LD_ReadReg(0x6);
LD_WriteReg(0x35, 0x33);
LD_WriteReg(0x1b, 0x55);
LD_WriteReg(0xb3, 0xaa);
if(LD_ReadReg(0x35) == 0x33 && LD_ReadReg(0x1b) == 0x55 && LD_ReadReg(0xb3) == 0xaa)
{
flag = 0;
}
return flag;
}
/*中断回调函数*/
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == LD3320_IRQ_Pin)
{
if(HAL_GPIO_ReadPin(LD3320_IRQ_GPIO_Port,LD3320_IRQ_Pin) == GPIO_PIN_RESET)
{
ProcessInt();
printf("SH\r\n");
}
}
}
2、LD3320.H
#ifndef LD3320_H__
#define LD3320_H__
//#include "stm32f1xx_hal.h"
#include "main.h"
// 以下三个状态定义用来记录程序是在运行ASR识别还是在运行MP3播放
#define LD_MODE_IDLE 0x00
#define LD_MODE_ASR_RUN 0x08
#define LD_MODE_MP3 0x40
// 以下五个状态定义用来记录程序是在运行ASR识别过程中的哪个状态
#define LD_ASR_NONE 0x00 // 表示没有在作ASR识别
#define LD_ASR_RUNING 0x01 // 表示LD3320正在作ASR识别中
#define LD_ASR_FOUNDOK 0x10 // 表示一次识别流程结束后,有一个识别结果
#define LD_ASR_FOUNDZERO 0x11 // 表示一次识别流程结束后,没有识别结果
#define LD_ASR_ERROR 0x31 // 表示一次识别流程中LD3320芯片内部出现不正确的状态
#define CLK_IN 24 /* 用户注意修改输入的晶振时钟大小 */
#define LD_PLL_11 (uint8_t)((CLK_IN/2.0)-1)
#define LD_PLL_MP3_19 0x0f
#define LD_PLL_MP3_1B 0x18
#define LD_PLL_MP3_1D (uint8_t)(((90.0*((LD_PLL_11)+1))/(CLK_IN))-1)
#define LD_PLL_ASR_19 (uint8_t)(CLK_IN*32.0/(LD_PLL_11+1) - 0.51)
#define LD_PLL_ASR_1B 0x48
#define LD_PLL_ASR_1D 0x1f
#define MIC_VOL 0x43 //咪头增益
//识别码客户修改处
#define CODE_CMD 0x00 //该命令码0x00用户不可进行修改。
#define CODE_DMCS 0x01 //代码测试
#define CODE_CSWB 0x02 //测试完毕
#define CODE_1KL1 0x03
#define CODE_1KL2 0x04
#define CODE_1KL3 0x05
#define CODE_1KL4 0x06
#define CODE_2KL1 0x18
#define CODE_2KL2 0x19
#define CODE_2KL3 0x1A
#define CODE_2KL4 0x1B
#define CODE_3KL1 0x1C
#define CODE_3KL2 0x1D
#define CODE_3KL3 0x1E
#define CODE_3KL4 0x1F
#define CODE_4KL1 0x20
#define CODE_4KL2 0x21
#define CODE_4KL3 0x22
#define CODE_4KL4 0x23
#define CODE_5KL1 0x24
#define RST_HIGH HAL_GPIO_WritePin(LD3320_RST_GPIO_Port,LD3320_RST_Pin,GPIO_PIN_SET)
#define RST_LOW HAL_GPIO_WritePin(LD3320_RST_GPIO_Port,LD3320_RST_Pin,GPIO_PIN_RESET)
#define SCK_HIGH HAL_GPIO_WritePin(LD3320_SCK_GPIO_Port,LD3320_SCK_Pin,GPIO_PIN_SET)
#define SCK_LOW HAL_GPIO_WritePin(LD3320_SCK_GPIO_Port,LD3320_SCK_Pin,GPIO_PIN_RESET)
#define MOSI_HIGH HAL_GPIO_WritePin(LD3320_MOSI_GPIO_Port,LD3320_MOSI_Pin,GPIO_PIN_SET)
#define MOSI_LOW HAL_GPIO_WritePin(LD3320_MOSI_GPIO_Port,LD3320_MOSI_Pin,GPIO_PIN_RESET)
#define IRQ_HIGH HAL_GPIO_WritePin(LD3320_IRQ_GPIO_Port,LD3320_IRQ_Pin,GPIO_PIN_SET)
#define IRQ_LOW HAL_GPIO_WritePin(LD3320_IRQ_GPIO_Port,LD3320_IRQ_Pin,GPIO_PIN_RESET)
#define CS_HIGH HAL_GPIO_WritePin(LD3320_CS_GPIO_Port,LD3320_CS_Pin,GPIO_PIN_SET)
#define CS_LOW HAL_GPIO_WritePin(LD3320_CS_GPIO_Port,LD3320_CS_Pin,GPIO_PIN_RESET)
void LD3320_main(void);
void User_Modification(uint8_t dat);
//函数声明
void LD_Reset(void);
void LD_Init_Common(void);
void LD_Init_ASR(void);
void ProcessInt(void);
void LD_AsrStart(void);
uint8_t LD_AsrRun(void);
uint8_t LD_AsrAddFixed(void);
uint8_t RunASR(void);
uint8_t LD_GetResult(void);
uint8_t LD3320_Init(void);
void LD_WriteReg(uint8_t address,uint8_t dataout);
uint8_t LD_ReadReg(uint8_t address);
uint8_t LD3320_Check(void);
#endif
3、主函数
/* USER CODE BEGIN 2 */
printf("LD3320 START TEST\r\n");
if(!LD3320_Init())
printf("LD3320 init succ\r\n");
else
printf("LD3320 init failed\r\n");
HAL_GPIO_WritePin(GPIOC,LED_Pin,GPIO_PIN_RESET);
HAL_Delay(200);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
LD3320_main();
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
若要更改语音输入关键词,可在LD3320.c中的LD_AsrAddFixed函数中增加拼音,并在文件最下面的回调函数中增添代码
七、原理讲解
【STM32】HAL库 STM32CubeMX教程十四---SPI
手把手教你使用STM32C8T6和LD3320(SPI通信版)
STM32CubeMX系列教程9:LD3320语音识别模块使用文章来源:https://www.toymoban.com/news/detail-827695.html
八、源码提供:
【STM32+HAL】语音识别模块LD3320文章来源地址https://www.toymoban.com/news/detail-827695.html
到了这里,关于【STM32+HAL】语音识别模块LD3320(SPI版)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!