一:对射式红外线传感器计数
1.1 对射式红外线传感器简介
1.1 产品特性
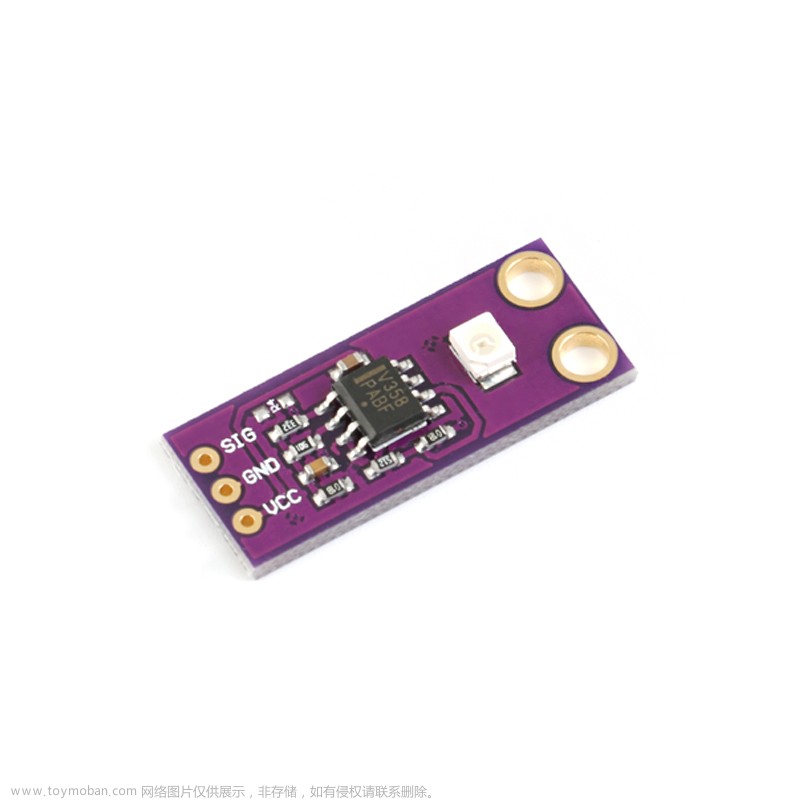
使用ITR9606高灵敏度槽型光耦器件,它由一个红外发光二极管和一个NPN光电三极管组成,槽宽度为5mm。传感器特设M3固定安装孔,调节方向与固定方便易用,使用宽电压LM393比较器,信号干净,波形好,驱动能力强,超过15mA。广泛用于电机转速检测,脉冲计数,位置限位等。
1.2 产品参数
工作电压3.3V-5V
输出形式:数字开关量D0输出(0 和 1),模拟输出A0引脚无效
1.3 使用说明

接好VCC和GND,模块电源指示灯会亮,模块槽中无遮挡时,接收管导通,模块DO输出低电平,开关指示灯亮;遮挡时,DO输出高电平,开关指示灯灭。模块DO可与继电器相连,组成限位开关等功能,也可以与有源蜂鸣器模块相连,组成报警器。DO输出接口可以与单片机I0口直接相连,一般接外部中断,检测传感器是否有遮档,如用电机码盘则可检测电机的转速。
1.2 驱动文件代码设计
首先要配置OLED、Delay函数的驱动文件代码,这两个驱动文件在上几篇文章中都有详细的介绍,再次就不再赘述。
配置完成前面的驱动文件之后,可以开始配置有关于本次最为重要的中断函数的驱动文件代码。我们可以取名为CountSensor.c和CountSensor.h两个文件,并存放到Hardware文件夹中。

首先,在CountSensor.c文件中配置必须需要的头文件 #include "stm32f10x.h" 。
然后开始配置驱动函数void CoutSensor_Init(void)。打开APB2外设总线,分别打开GPIOB和AFIO的外设总线。AFIO是映射函数。
配置完这两个之后,再配置GPIO_EXTILineConfig函数,因为我们连接的是PB14引脚,所以打开中断线为GPIOB_GPIO_Pin_14。
然后定义EXTI_InitTypeDef EXTI_InitStructure结构体,分别填上相关的参数。
然后配置中断组,配置为中段的2号中断组。
最后定义NVIC的结构体,定义结构体的相关参数。
具体代码如下:
CountSensor.c
#include "stm32f10x.h" // Device header
uint16_t CountSensor_Count;
void CoutSensor_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource14);
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line14;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;
EXTI_Init(&EXTI_InitStructure);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
}
uint16_t GetSensor_Get(void)
{
return CountSensor_Count;
}
void EXTI15_10_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line14) == SET)
{
CountSensor_Count ++;
EXTI_ClearITPendingBit(EXTI_Line14);
}
}CountSensor.h
#ifndef __COUNT_SENSOR_H
#define __COUNT_SENSOR_H
#include "stm32f10x.h"
void CoutSensor_Init(void);
uint16_t GetSensor_Get(void);
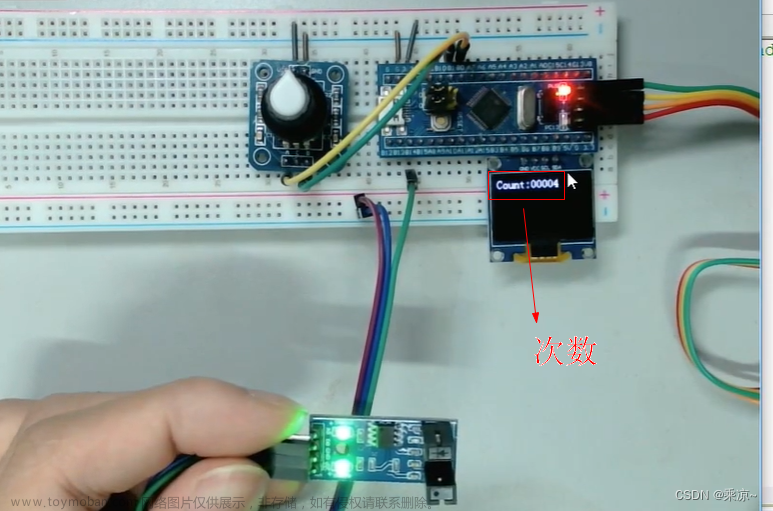
#endif1.3 电路接线演示

1.4 主体代码演示
驱动代码设置好之后,主函数main.c函数代码就简单了。
写好头文件之后,先进性函数声明初始化,然后显示相关的数据就行。
main.c
#include "stm32f10x.h"
#include "Delay.h"
#include "OLED.h"
#include "ConutSensor.h"
#include "Encoder.h"
int16_t Num;
int main(void)
{
OLED_Init();
CoutSensor_Init();
OLED_ShowString(1, 1, "Count:");
while(1)
{
Num = GetSensor_Get();
OLED_ShowNum(1, 7 ,Num, 5);
}
}
1.5 实操效果展示

二: 旋转编码器计数
2.1 旋转编码器简介

2.1.1 产品简介
EC11旋转编码器广泛用于车载DVD,车载导航,汽车影音上常被人称为车载编码器。编码器主要用于频率调节,高度调节温度调节及音量调节的参数控制。注意编码器避免储藏于高温潮湿及腐蚀的场所,拆包装后未使用完的剩余产品请在防潮防毒的环境下保存。
2.1.2 产品参数
1.额定电压:DC 5V
2.各相导线AB相:0.5mA(Max 5mA,Min 0.5mA)
3.公共导线C:1mA(Max10mA,Min 0.5mA)
4.使用温度范围:-30C~+80°C
2.1.3 输出信号
输出信号:A、B两相都输出方波,顺时针方向旋转时,A相超前B相90度,逆时针方向旋
转时,B相超前A相90度。

2.1.4 接口说明

2.2 电路接线演示

2.3 驱动文件代码设计
接着上面配置好OLED、Delay函数的驱动文件代码的基础上,再次添加旋转编码器驱动文件Encoder.c和Encoder.h的驱动文件。因为上文配置过Hardware头文件路径,所以直接把这两个文件放入到Hardware文件中即可。
在Encoder.c文件中,首先配置中断驱动函数,此处驱动函数的配置和上文几乎差不多,一个思路,首先打开GPIOB和AFIO的APB2高速外设时钟。然后定义GPIO_InitTypeDef结构体,配置结构体相关的参数,将结构体赋值GPIOB。
紧接着配置中断线路。因为我们连接的是PB0和PB1接线口,所以配置0和1的中断线。
再紧接着配置 EXTI_InitTypeDef中断结构体,配置中断结构体的参数,赋值中断结构体。
再紧接着分配NVIC结构体的分组,在此我们分配在中段的第二组。
再紧接着定义NVIC_InitTypeDef,配置相关参数,给结构体赋值。此处因为旋转编码器需要分钟正反转,所以在此我们声明两次NVIC_InitTypeDef结构体,分别赋予PB0和PB1两个中断通道。
在中断驱动初始化函数配置完成之后,然后创建中断函数的具体内容。中断函数的名称都是固定的,可以在驱动文件中找到。判断驱动文件是否处于SET状态,然后执行++或--的功能,最后一定要需要EXTI_ClearITPendingBit(EXTI_Line0)。
在Encoder.h函数中,只要配置Encoder.c文件对外声明的函数就行。具体见以下代码。
Encoder.c
#include "stm32f10x.h" // Device header
int16_t EncoderCount;
void Encoder_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource1);
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line1;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;
EXTI_Init(&EXTI_InitStructure);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_Init(&NVIC_InitStructure);
}
void EXTI0_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line0) == SET)
{
if (GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1) == 0)
{
EncoderCount--;
}
EXTI_ClearITPendingBit(EXTI_Line0);
}
}
void EXTI1_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line1) == SET)
{
if (GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_0) == 0)
{
EncoderCount++;
}
EXTI_ClearITPendingBit(EXTI_Line1);
}
}
int16_t Encoder_Get(void)
{
int16_t temp;
temp = EncoderCount;
EncoderCount = 0;
return temp;
}Encoder.h
#ifndef __ENCODER_H
#define __ENCODER_H
#include "stm32f10x.h" // Device header
void Encoder_Init(void);
int16_t Encoder_Get(void);
#endif2.4 主体代码演示
其实主体代码很简单,主要的功能都已经在驱动文件代码里面编写了,在主文件代码里面只需要声明和调用即可。
main.c
#include "stm32f10x.h"
#include "Delay.h"
#include "OLED.h"
#include "Encoder.h"
int16_t Num;
int main(void)
{
OLED_Init();
Encoder_Init();
OLED_ShowString(1, 1, "Num:");
while(1)
{
Num += Encoder_Get();
OLED_ShowSignedNum(1, 5 ,Num, 5);
}
}2.5 实操效果演示
 文章来源:https://www.toymoban.com/news/detail-828196.html
文章来源:https://www.toymoban.com/news/detail-828196.html
与君共勉 დ,关注我,持续更新中~ 文章来源地址https://www.toymoban.com/news/detail-828196.html
到了这里,关于STM32第五课:对射式红外线传感器计数和旋转编码器计数的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!