m
文章目录
-
- 概要
- 整体架构流程
- 技术名词解释
- 技术细节
- 小结
文章来源地址https://www.toymoban.com/news/detail-828649.html
概要
使用STM32F103C8T6和ASRPRO语音芯片完成对电机的控制。该基础模块可以延伸成智能座椅的控制,智能窗帘,智能门窗,智能垃圾桶等。此处以智能座椅为基础概念进行制作
虽然ASRPRO语音芯片可以独立完成对电机的控制,但是如果想后续加入WIFI模块,蓝牙模块等功能,还是需要搭配单片机使用。
整体架构流程

最终工程目录如图
首先在天问block上完成对ASRPRO芯片的相关配置,再对STM32芯片完成配置。天问block是一款很简单的图像化编程软件,初学者大概一个小时就能上手,所以在此不再详细说明。本文主要侧重于对STM32的代码编写。如有需要,以下是csdn上一个大佬写的天问block教程
基于天问block编译环境下ASRPRO语音芯片程序编写教程(一)软件下载与基础程序语句篇-CSDN博客
参考
该项目基础建立在B站江科大的STM32教学基础上,如有疑问,可前往B站观看详细内容。
STM32入门教程-2023版 细致讲解 中文字幕_哔哩哔哩_bilibili
技术细节
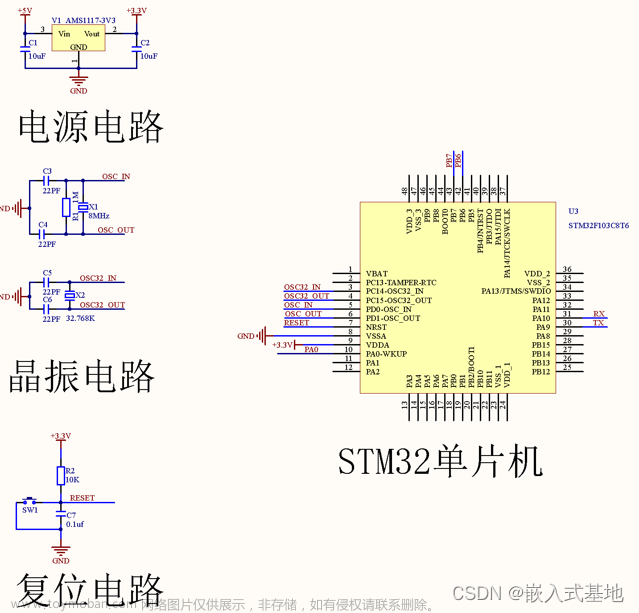
(1).对ASRPRO芯片完成语音控制和输出控制,使得使用者给出不同语音指令其输出引脚输出不同指令。本项目基于智能座椅,所以共有“向前”,“向后”,“上升”,“下降”,“停止”,五个指令,其输出引脚PA2输出的数据分别为“A”,“B”,“C”,“D”,“E”,五个数据。并配置波特率为9600

(由原理图可知ASRPRO芯片的串口输出引脚TX为PA2引脚)
语音模块配置如下

将ASRPRO与STM32连接起来,连接方式如下
ASRPRO STM32
GND———>GND
3.3V———>3.3V
PA2———>PA10(该引脚为stm32 USART1的 RX脚)
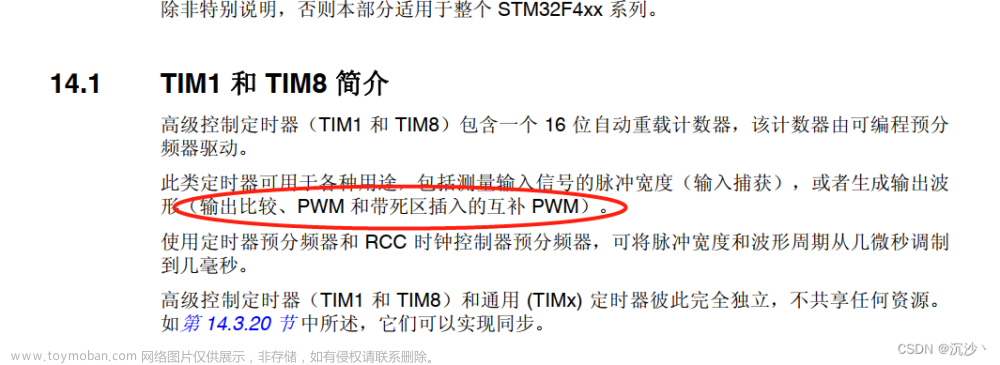
(2).完成对语音模块芯片控制后,开始对STM32进行设计

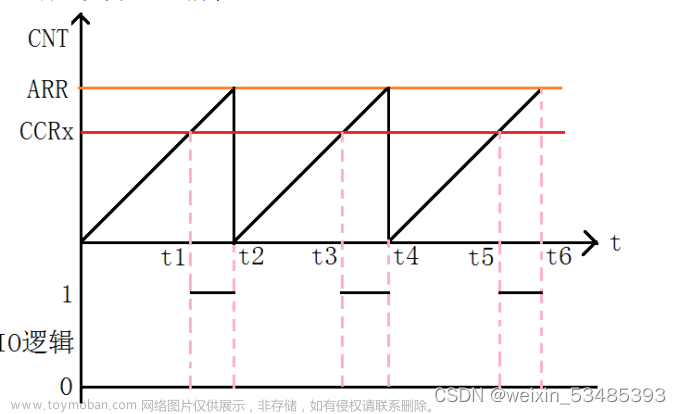
1.电机输出一般采用PWM波控制,所以首先建立一个PWM.c文件和其对应的PWM.h文件。PWM波由定时器控制产生。
PWM.c
#include "stm32f10x.h"
void PWM_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
//pwm波形通过PA0输出
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
//初始化GPIO
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出(即定时器控制的)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
//初始化时钟
TIM_InternalClockConfig(TIM2);
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period=100-1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler=72-1; //预分频器 PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);
TIM_OCStructInit(&TIM_OCInitStructure);//结构体赋初值
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCNPolarity_High;//输出极性为高极性
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;//输出使能
TIM_OCInitStructure.TIM_Pulse=0 ; //CCR
TIM_OC3Init(TIM2,&TIM_OCInitStructure);
TIM_Cmd(TIM2,ENABLE);
}
void PWM_SetCompare3(uint16_t Compare)
{
TIM_SetCompare3(TIM2,Compare);
}
PWM.h
#ifndef _PWM_H
#define _PWM_H
#include "stm32f10x.h"
void PWM_Init(void);
void PWM_SetCompare3(uint16_t Compare);
#endif2.能够输出PWM波后,就可以开始写对电机的控制代码。创建一个Motor.c文件和Motor.h文件。电机需要用到TB6612电机驱动模块对其进行编码来完成电机的速度控制和转向控制。
对于TB6612模块的学习,可以借鉴Stm32-使用TB6612驱动电机及编码器测速_stm32编码电机_藕粉-的博客-CSDN博客
TB6612与STM32连接方式如下
TB6613 STM32
PWMA ——>PA2
AIN2 ———>PA5
AIN1 ———>PA4
STBY ——> 3.3V
VCC ———>3.3V
GND ———>GND
VM连接一个5V电源,AD1和AD2口连接电机。
最终连接如图

Motor.c
#include "stm32f10x.h"
#include "PWM.h"
void Motor_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//电机方向脚初始化
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
PWM_Init();
}
void Motor_SetSpeed(int16_t Speed)
{
if(Speed>0)//正转
{
GPIO_SetBits(GPIOA,GPIO_Pin_4);
GPIO_ResetBits(GPIOA,GPIO_Pin_5);
PWM_SetCompare3(Speed);
}
else if(Speed==0)
{
GPIO_ResetBits(GPIOA,GPIO_Pin_4);
GPIO_ResetBits(GPIOA,GPIO_Pin_5);
}
else//反转
{
GPIO_SetBits(GPIOA,GPIO_Pin_5);
GPIO_ResetBits(GPIOA,GPIO_Pin_4);
PWM_SetCompare3(-Speed);
}
}#ifndef _MOTOR_H
#define _MOTOR_H
#include "stm32f10x.h"
void Motor_Init(void);
void Motor_SetSpeed(int8_t Speed);
#endif(3).完成对电机配置后,要实现对电机的语音控制,就需要进行单片机与语音模块间的通信。该通信由串口完成。建立Serial.c文件和Serial.h文件
Serial.c
#include "stm32f10x.h"
void Serial_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
//开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
USART_InitStructure.USART_BaudRate=9600; //波特率
USART_InitStructure.USART_HardwareFlowControl= USART_HardwareFlowControl_None ;//硬件流控制
USART_InitStructure.USART_Mode=USART_Mode_Rx; //串口模式
USART_InitStructure.USART_Parity= USART_Parity_No ;//校验位
USART_InitStructure.USART_StopBits=USART_StopBits_1;//停止位
USART_InitStructure.USART_WordLength=USART_WordLength_8b;//字长
USART_Init(USART1,&USART_InitStructure);
USART_Cmd(USART1,ENABLE);
} Serial.h
#ifndef _SERIAL_H
#define _SERIAL_H
#include "stm32f10x.h"
void Serial_Init(void);
#endif(4)完成对不同模块编程后,就可以结合不同模块的函数,对main函数进行编程
main.c
#include "stm32f10x.h"
#include "Motor.h"
#include "serial.h"
uint8_t i;
uint8_t RxData;//接收数据存放位置
void Delay_ms(uint16_t time)
{
uint16_t i=0;
while(time--)
{
i=12000;
while(i--);
}
}
int main(void)
{
Motor_Init();
Serial_Init();
while(1)
{
if(USART_GetFlagStatus(USART1,USART_FLAG_RXNE)==SET)
{
RxData = USART_ReceiveData(USART1);
if(RxData=='A')
{
Motor_SetSpeed(20);
}
else if(RxData=='B')
{
Motor_SetSpeed(-20);
}
else if(RxData=='C')
{
Motor_SetSpeed(20);
}
else if(RxData=='D')
{
Motor_SetSpeed(-20);
}
else if(RxData=='E')
{
Motor_SetSpeed(0);
}
}
}
}
后续作品实现可点进主页观看
小结
翻了很多资料,都没有找到STM32和ASRPRO通信的详细教程,遂写下这篇文章以作记录文章来源:https://www.toymoban.com/news/detail-828649.html
到了这里,关于STM32智能语音控制电机的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!