Carla安装记录
Ubuntu18.04使用Package installation安装Carla记录
1、下载安装包
此处为Carla官方文档,可以进行相关学习
此处为安装包,进行需要版本的下载,点击即可进入,如果无法下载可能需要科学上网。
如果是ubuntu下载箭头所指处即可,windows下载相应的也可。
下载后对CARLA_0.9.12.tar.gz文件进行解压,解压后的目录应如图所示
将压缩包AdditionalMaps_0.9.12.tar.gz放置Import文件夹下即可。
在官方文档中该下载流程如下所示。我们选择的安装是方式B。
2、安装Carla
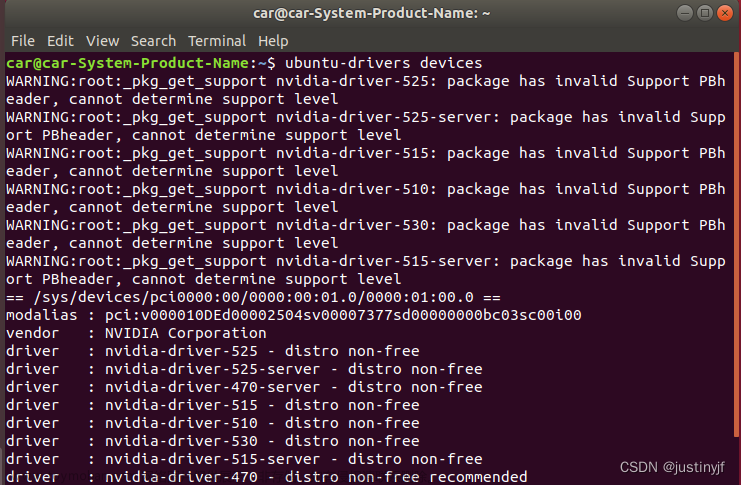
在运行前需要安装显卡驱动、将pip或者pip3更新至最低要求,pip3官方要求20.3即以上。 我的是Ubuntu18.04,默认是python2.7,因此我是pip安装后续的环境。
# 如果是python3
pip3 -V
# 如果是python2.7
pip -V
版本不够升级至最新即可
pip3 install --upgrade pip
pip install --upgrade pip
# 根据使用的pip进行安装
pip install --user pygame numpy
pip3 install --user pygame numpy
如果使用pip下载速度过慢可以进行换源加快速度,我参考大佬的临时换源方法
清华:https://pypi.tuna.tsinghua.edu.cn/simple
阿里云:http://mirrors.aliyun.com/pypi/simple/
中国科技大学 https://pypi.mirrors.ustc.edu.cn/simple/
华中理工大学:http://pypi.hustunique.com/
山东理工大学:http://pypi.sdutlinux.org/
临时使用:
可以在使用pip的时候加参数 -i https://pypi.tuna.tsinghua.edu.cn/simple
例如:
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple carla
这样就会从清华这边的镜像去安装carla库。
接下来可以进入解压后的主目录,运行脚本文件 ./CarlaUE4.sh 将出现Carla世界的画面,说明没有问题。
如果有问题显示没有libomp5,使用 sudo apt-get install libomp5 安装。在运行脚本。
然后运行脚本文件 ./ImportAssets.sh 将资源自动导入。
使用pip下载carla的python包,当然官网也有另外两种方式,可以在官网进行学习。
# Python 3
pip3 install carla
# Python 2
pip install carla
如果这样安装的话,适用于最新版本,目前默认的是0.9.15,我安装的是0.9.12版本,会在后面导致版本不匹配,因此如果已经安装了需要进行卸载高版本的,再按指定对应版本安装。
# Python 3
pip3 uninstall carla
# Python 2
pip uninstall carla
然后再安装,速度太慢可以换源。
pip install carla==0.9.12 # 该版本为自己下载的对应版本
电脑比较卡的话,需要有一个终端把仿真器打开,可以在后台运行,运行脚本文件命令为:./CarlaUE4.sh -quality-level=Epic -RenderOffScreen,即可不用出carla世界图,但是一定需要运行该脚本才能进行后续的操作。
3、检验是否成功
开启一个终端,进入主目录,运行脚本 ./CarlaUE4.sh 或者 ./CarlaUE4.sh -quality-level=Epic -RenderOffScreen,然后另起终端,cd PythonAPI\examples,运行文章来源:https://www.toymoban.com/news/detail-831395.html
python2 manual_control.py
即可实现键盘控制车辆运动。
Carla安装即成功,我的电脑显存太小,太卡,因此未附上运行成功视频。文章来源地址https://www.toymoban.com/news/detail-831395.html
到了这里,关于Carla安装记录的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!