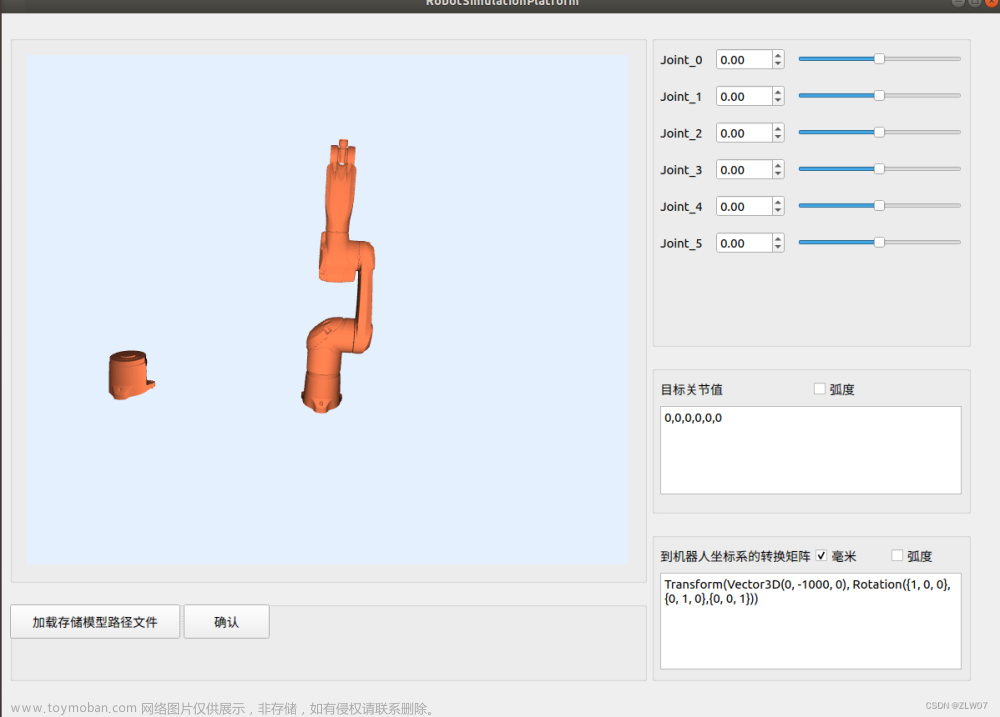
在Qt + opengl中完成的双臂SCARA机器人的简单模拟。
一、演示效果
 文章来源:https://www.toymoban.com/news/detail-831401.html
文章来源:https://www.toymoban.com/news/detail-831401.html
二、核心程序
#include "glwidget.h"
#include <GL/glu.h>
GLWidget::GLWidget(QWidget *parent) :
QGLWidget(parent),
pitch(30.0), yaw(0.0), distance(7.0)
{
}
void GLWidget::initializeGL()
{
glEnable(GL_DEPTH_TEST);
glClearDepth(1.0);
glEnable(GL_CULL_FACE);
glEnable(GL_POINT_SMOOTH);
glPointSize(10.0);
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
glHint(GL_POLYGON_SMOOTH_HINT, GL_NICEST);
glHint(GL_PERSPECTIVE_CORRECTION_HINT, GL_NICEST);
glClearColor(0.0, 0.0, 0.0, 0.0);
}
void GLWidget::paintGL()
{
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
setView();
setLight();
glEnable(GL_COLOR_MATERIAL);
glDisable(GL_LIGHTING);
glColor4f(0.0, 0.5, 0.0, 0.5);
for(int i = 0; i <= 20; ++i) {
glBegin(GL_LINES);
glVertex3f(-5.0+0.5*i, -5.0, 0.0); glVertex3f(-5.0+0.5*i, 5.0, 0.0);
glVertex3f(-5.0, -5.0+0.5*i, 0.0); glVertex3f(5.0, -5.0+0.5*i, 0.0);
glEnd();
}
glColor4f(0.5, 0.5, 0.0, 0.5);
glBegin(GL_LINES);
glVertex3f(robot->getY(), -robot->getX(), 0.0); glVertex3f(robot->getY(), -robot->getX(), robot->getZ()+0.5);
glEnd();
glColor4f(0.9, 0.0, 0.0, 0.5);
robot->displayPath();
glDisable(GL_COLOR_MATERIAL);
glEnable(GL_LIGHTING);
robot->display();
glFlush();
}
void GLWidget::resizeGL(int _w, int _h)
{
w = _w; h = _h;
glViewport(0.0, 0.0, w, h);
setView();
}
void GLWidget::setPitch(double _pitch)
{
pitch = _pitch;
}
void GLWidget::setYaw(double _yaw)
{
yaw = _yaw;
}
void GLWidget::setDistance(double _distance)
{
distance = _distance;
}
void GLWidget::setView()
{
glMatrixMode(GL_PROJECTION);
glLoadIdentity();
gluPerspective(60.0, 1.0*w/h, 0.1, 100.0);
glMatrixMode(GL_MODELVIEW);
glLoadIdentity();
gluLookAt(-distance, 0.0, 0.0,
0.0, 0.0, 0.0,
0.0, 0.0, 1.0);
glRotatef(pitch, 0.0, -1.0, 0.0);
glRotatef(yaw, 0.0, 0.0, -1.0);
}
void GLWidget::setLight()
{
GLfloat lamb[] = { 0.1, 0.1, 0.1, 1.0 };
GLfloat ldif[] = { 1.0, 1.0, 1.0, 1.0 };
GLfloat lpos[] = { -10.0, -10.0, 10.0, 1.0 };
glEnable(GL_COLOR_MATERIAL);
glDisable(GL_LIGHTING);
glDisable(GL_LIGHT0);
glColor4fv(ldif);
glBegin(GL_POINTS);
glVertex4fv(lpos);
glEnd();
glDisable(GL_COLOR_MATERIAL);
glEnable(GL_LIGHTING);
glEnable(GL_LIGHT0);
glLightfv(GL_LIGHT0, GL_POSITION, lpos);
glLightfv(GL_LIGHT0, GL_AMBIENT, lamb);
glLightfv(GL_LIGHT0, GL_DIFFUSE, ldif);
}
三、下载链接
https://download.csdn.net/download/u013083044/88851543文章来源地址https://www.toymoban.com/news/detail-831401.html
到了这里,关于qt-双臂SCARA机器人动画的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!