本例实验采用TT电机

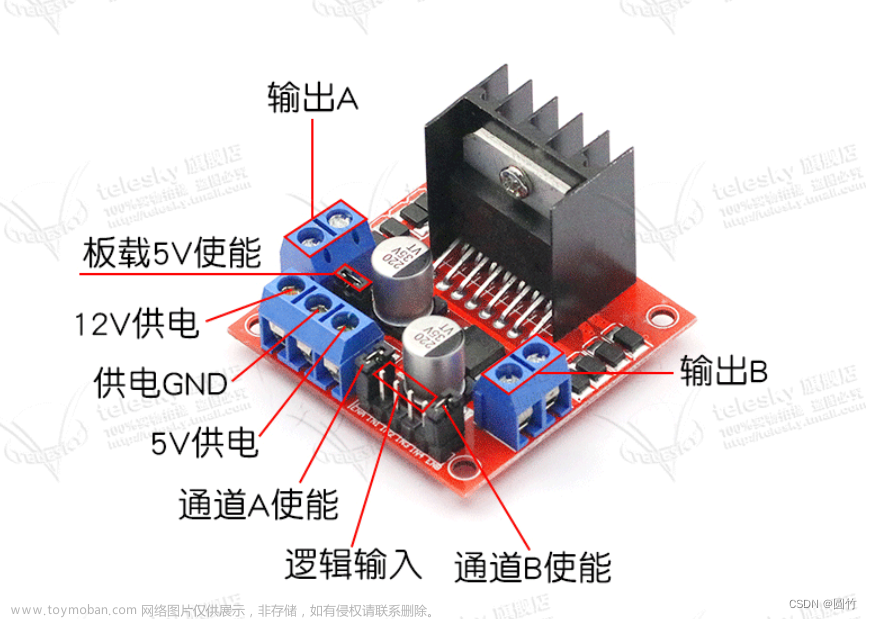
本例实验采用MX1508双路马达驱动模块




MX1508双路马达驱动模块主要参数
双路H桥电机驱动,可以同时驱动两路直流电机或者1个4线两相式步进电机;
模块供电电压2V-10V;
信号端输入电压1.8-7V;
单路工作电流1.5A,峰值电流可达2.5A,低待机电流 (小于 0.1uA);
内置防共态导通电路,输入端悬空时,电机不会误动作;
内置带迟滞效应的过热保护电路 (TSD),无需担心电机堵转;
产品尺寸: 24.7215mm (长宽高),超小体积,适合组装和车载;
安装孔直径:2 mm;
重量:5g 。
PWM控制电机原理
是一种利用微处理器的数字输出来对模拟电路进行控制的技术,通过调节脉冲宽度来控制输出电压或电流,从而实现对电机转速或转向的控制。PWM的频率是指在一秒钟内,信号从高电平到低电平再回到高电平的次数,占空比是指一个脉冲周期内,高电平的时间与整个周期时间的比例。占空比越大,所得到的平均电压也就越大,电机转速就高;占空比越小,所得到的平均电压也就越小,电机转速就低。PWM可以通过H桥电路来实现电机的正反转调速,H桥电路由四个功率电子开关构成,通过控制对角的两个电子开关导通,另外两个截止,可以改变电机两端的电源极性,从而改变电机的转向。PWM还可以通过不同的占空比来控制舵机的转角,舵机的频率一般为50HZ,也就是一个20ms左右的时基脉冲,而脉冲的高电平部分一般为0.5ms-2.5ms范围,来控制舵机不同的转角。文章来源:https://www.toymoban.com/news/detail-831756.html



【花雕动手做】实验七十四:彩屏语音控制TT电机正反向多种速度旋转
实验开源代码文章来源地址https://www.toymoban.com/news/detail-831756.html
#define ASC2_12
#define ST7735_CS_PIN 9
#define ST7735_CS_GPIO_PIN gpio_pin_1
#define ST7735_DC_PIN 1
#define ST7735_DC_GPIO_PIN gpio_pin_1
#define ST7735_RST_PIN 25
#define ST7735_RST_GPIO_PIN gpio_pin_1
#define ST7735_SCK_PIN 3
#define ST7735_SCK_GPIO_PIN gpio_pin_3
#define ST7735_MOSI_PIN 2
#define ST7735_MOSI_GPIO_PIN gpio_pin_2
#define ASC2_32
#define ST7735S_RGB_GBR_ORDER 0
#include "asr.h"
extern "C"{
void</到了这里,关于【花雕动手做】ASRPRO语音识别(69)---电机正反转PWM彩屏的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!