士兰微是一家集成电路和半导体制造商。它专注于研发和生产高性能的MEMS传感器,如加速度计、陀螺仪和组合传感器。这些高精度设备广泛应用于消费电子、汽车、工业以及AR/VR等领域。通过技术创新,士兰微旨在提供可靠的传感器解决方案,以促进智能设备的发展。
随着科技的不断进步,增强现实(AR)和虚拟现实(VR)技术已经逐渐成为消费电子市场的热门趋势。这些技术的发展离不开精确的运动追踪和定位系统,而陀螺仪作为捕捉和响应用户动作的关键组件,在这些系统中扮演着至关重要的角色。士兰微的六轴陀螺仪SC7I22因其高精度、低功耗等特性,能在AR/VR头显设备中得到了广泛应用。
一、SC7I22陀螺仪简介
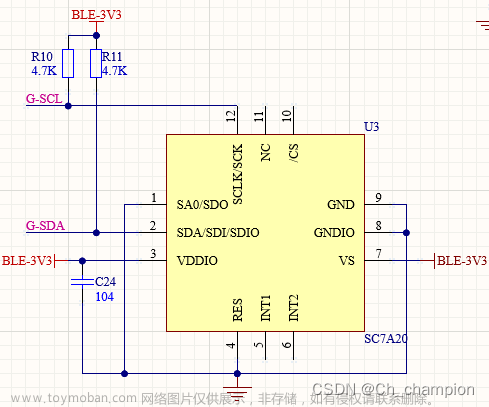
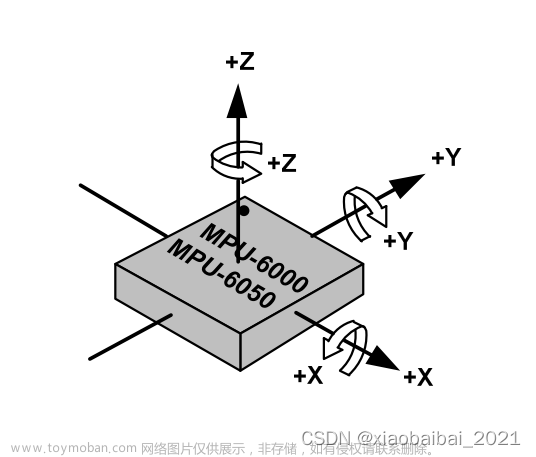
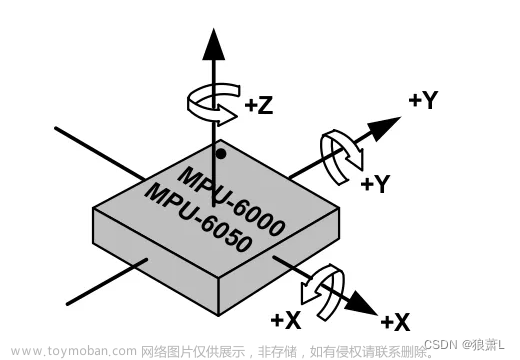
士兰微的SC7I22是一款集成了3轴加速度计和3轴陀螺仪的六轴运动跟踪传感器。它采用了先进的MEMS技术,能够提供精确的运动检测和方向定位。此外,SC7I22具备低功耗设计,非常适合需要长时间运行且对电池寿命有要求的AR/VR头显设备。
二、SC7I22在AR/VR头显中的应用
1. 角度测量与方向维持
在AR/VR应用中,持续准确的角度测量对于确保虚拟图像与现实世界同步非常关键。SC7I22通过其内置的陀螺仪实时捕捉用户头部的每一个微小转动,从而使得虚拟场景能够平滑且自然地随着用户的动作变换。
2. 提高交互体验
利用SC7I22的高精度运动数据,AR/VR头显可以提供更加直观和自然的交互体验。例如,在游戏中,玩家可以通过转动头部来瞄准目标或查看虚拟环境的不同角落。
3. 位置跟踪与减少漂移
结合加速计的数据,SC7I22可以实现复杂的位置跟踪功能,允许系统不仅追踪旋转动作,还能在一定程度上追踪位移。同时,陀螺仪提供的稳定参考可以帮助校正位置漂移,确保长时间的游戏或工作不会累积误差。
4. 提升沉浸感
在沉浸式VR体验中,任何不匹配的动作都可能导致用户体验的断裂。SC7I22的高响应速度和精确度保证了用户的动作与虚拟环境中的反应完美同步,增强了沉浸感。文章来源:https://www.toymoban.com/news/detail-832275.html
陀螺仪在AR和VR设备中发挥着关键作用,它不仅提高了用户体验的真实性和沉浸感,还是实现精确运动追踪和交互的基础。士兰微的SC7I22六轴陀螺仪可应用在AR/VR头显设备中的。随着AR/VR技术的不断发展和普及,对高精度、低功耗的传感器需求将持续增长。国产陀螺仪将以其出色的性能和可靠性,在未来的AR/VR设备中扮演更加重要的角色,并有望推动这些技术向更高的水平发展。文章来源地址https://www.toymoban.com/news/detail-832275.html
到了这里,关于士兰微六轴陀螺仪SC7I22在AR/VR头显设备中的应用的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!