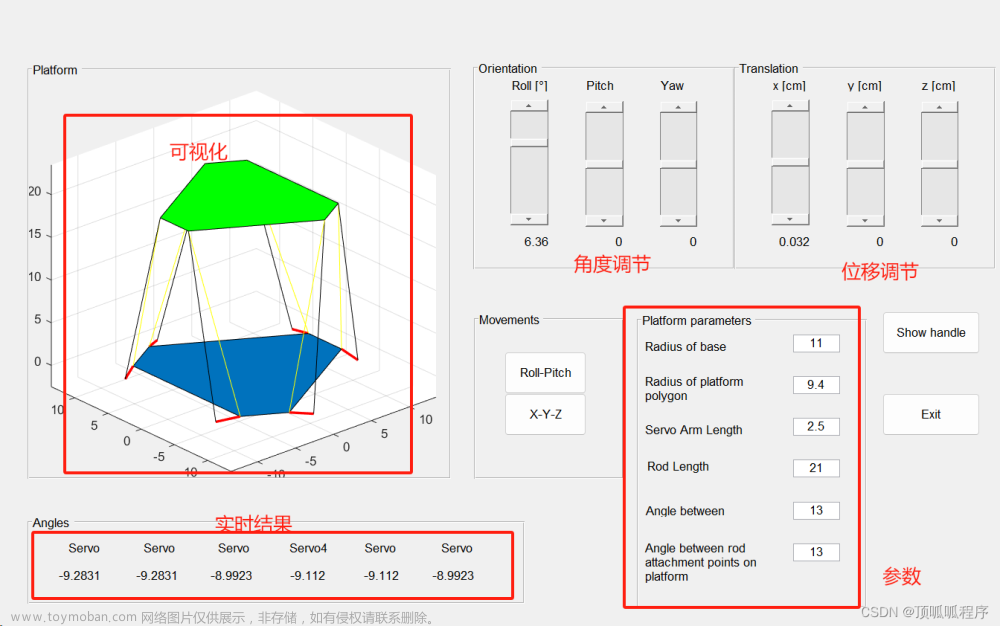
基于matlab的六自由度并联摇摆台的反解控制算法,stewart平台,配有GUI界面,可以自定义角度,杆长等参数。设定动平台位姿即能得到电机参数。程序已调通,可直接运行。
 文章来源:https://www.toymoban.com/news/detail-832390.html
文章来源:https://www.toymoban.com/news/detail-832390.html
168 六自由度并联摇摆台 反解控制算法 (xiaohongshu.com)文章来源地址https://www.toymoban.com/news/detail-832390.html
到了这里,关于168基于matlab的六自由度并联摇摆台的反解控制算法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!