目录
一、基本概念澄清
1.1 任务
1.2 进程
1.3 线程
1.4 比较
1.5 任务VS进程
1.6 进程 VS 线程
1.7 任务 进程 线程 发展历史
任务(Task):
进程(Process):
线程(Thread):
发展趋势:
二、不同操作系统中任务、进程、线程
2.1 Linux:没人任务,只有进程与线程
进程相关函数:
线程相关函数:
2.2 VxWorks:只有任务,没有进程与线程
2.3 RT Thread:只有线程,没有任务和进程
一、基本概念澄清
![[嵌入式系统-32]:RT-Thread -17- 任务、进程、线程的区别,嵌入式系统,架构,嵌入式,操作系统,结构,linux](https://imgs.yssmx.com/Uploads/2024/02/832709-1.png)
![[嵌入式系统-32]:RT-Thread -17- 任务、进程、线程的区别,嵌入式系统,架构,嵌入式,操作系统,结构,linux](https://imgs.yssmx.com/Uploads/2024/02/832709-2.png)
1.1 任务
在计算机科学中,任务(Task)是指一个计算机程序的执行实体,它是操作系统调度和管理的基本单位。任务是程序在计算机系统中运行的单位,代表了一组特定的操作和逻辑流程,执行特定的计算或操作。
任务可以包括一个应用程序或一个线程。一个任务可以由一个或多个线程组成,线程是任务的实际执行单元。在多线程编程中,任务可以被分割成多个并发执行的线程,共享相同的资源和上下文环境。
任务的特点包括:
- 独立性:任务是一个独立的执行实体,可以独立地进行调度和管理。
- 并发性:多个任务可以同时存在,彼此之间可以并发执行。
- 资源管理:任务可以访问和操作操作系统和硬件资源,如内存、文件、网络等。
- 上下文切换:任务之间的切换时机由操作系统的调度器控制,根据调度算法进行上下文切换,使任务能够交替执行。
任务的创建、调度和管理都由操作系统负责。操作系统通过特定的调度算法决定任务的执行顺序和时间片分配,以实现任务间的公平竞争和优先级控制。
任务概念在操作系统中是重要的,它使得多个程序能够同时运行,提高了计算机系统的并发能力和资源利用率,为用户提供了更好的使用体验。
1.2 进程
在操作系统中,进程(Process)是一个程序的执行实例,是操作系统进行资源分配和调度的基本单位。每个进程包含了程序代码、数据、堆栈和进程控制块等信息,它们拥有独立的虚拟地址空间。进程之间是相互独立的,一个进程的崩溃不会影响其他进程的执行。
![[嵌入式系统-32]:RT-Thread -17- 任务、进程、线程的区别,嵌入式系统,架构,嵌入式,操作系统,结构,linux](https://imgs.yssmx.com/Uploads/2024/02/832709-3.png)
![[嵌入式系统-32]:RT-Thread -17- 任务、进程、线程的区别,嵌入式系统,架构,嵌入式,操作系统,结构,linux](https://imgs.yssmx.com/Uploads/2024/02/832709-4.png)
以下是关于进程的一些重要概念:
-
进程控制块(Process Control Block,PCB):
每个进程都有一个对应的 PCB,用于保存进程的执行状态和控制信息,包括进程标识符、程序计数器、寄存器内容、进程状态、优先级、堆栈指针等。操作系统通过管理 PCB 来控制进程的创建、运行、切换和终止。 -
进程状态:
进程可以处于多种状态,常见的包括就绪状态(Ready)、运行状态(Running)、阻塞状态(Blocked)等。操作系统通过状态转换来管理进程的调度和执行。 -
进程间通信(IPC):
进程可以通过进程间通信机制来进行数据交换和协作,如管道、消息队列、信号量、共享内存等。IPC 可以实现进程之间的数据共享和协同工作。 -
进程调度:
操作系统根据进程的优先级、时间片轮转等算法来调度进程的执行,以实现多任务并发执行和资源共享。 -
进程同步与互斥:
多个进程之间可能存在竞争条件和互斥访问问题,操作系统提供了各种同步机制和互斥方式来确保进程之间的正确协同工作。 -
进程创建和销毁:
进程可以通过系统调用创建新的进程,也可以通过系统调用终止自身或其他进程的执行。进程创建会分配资源给新进程,销毁会释放占用的资源。
总的来说,进程是操作系统中的重要概念,它为程序的执行提供了独立的环境,实现了计算机系统的多任务处理和并发执行能力。操作系统通过管理进程来实现资源的分配、调度、安全隔离和协同合作,为用户提供了高效、稳定的计算环境。
![[嵌入式系统-32]:RT-Thread -17- 任务、进程、线程的区别,嵌入式系统,架构,嵌入式,操作系统,结构,linux](https://imgs.yssmx.com/Uploads/2024/02/832709-5.png)
1.3 线程
在操作系统中,线程(Thread)是进程的执行单元,是程序执行流的最小单位。每个进程可以包含一个或多个线程,这些线程共享进程的资源,如内存空间、文件描述符等。线程是操作系统调度和管理的基本单位,相比于进程,线程的创建、销毁和切换开销更小。
![[嵌入式系统-32]:RT-Thread -17- 任务、进程、线程的区别,嵌入式系统,架构,嵌入式,操作系统,结构,linux](https://imgs.yssmx.com/Uploads/2024/02/832709-6.png)
下面是关于线程的一些重要概述:
-
并发执行:多个线程可以同时运行在同一个进程中,每个线程独立执行指定的任务,从而实现并发性,提高程序的响应性和处理能力。
-
资源共享:线程属于同一个进程,它们共享进程的资源,包括代码段、数据段、堆栈、文件描述符等。这使得在多线程的环境下,线程之间可以方便地共享数据和信息。
-
轻量级:相比于进程,线程的创建、销毁和切换开销更小。这是因为线程共享进程的地址空间和其他资源,而不需要额外的内存空间和系统资源分配。
-
并行和并发:线程的执行可以是并行的(多个线程同时在多个处理器上执行)或者是并发的(多个线程在同一个处理器上交替执行)。实现真正的并行需要多个物理处理器或者多核处理器的支持。
-
线程同步和互斥:多个线程之间共享进程的资源,可能会产生竞争条件和互斥问题。线程同步和互斥机制(如锁、信号量、条件变量)可以确保线程之间的正确协同工作和互斥访问。
-
线程调度:操作系统通过线程调度算法,决定哪些线程获得 CPU 时间片并执行任务。线程调度的策略可以根据优先级、时间片轮转、抢占等方式来实现。
线程的使用可以提高程序的并发性和响应性,充分利用多核处理器的性能。多线程编程也带来了线程间的同步和互斥问题,需要合理地设计和管理线程的执行,以避免竞争条件和资源冲突。
1.4 比较
在操作系统中,任务(Task)、进程(Process)和线程(Thread)是不同概念,用于描述程序执行的不同方式和操作系统管理的单位。
-
任务(Task):
任务是操作系统中最基本的执行单元。一个任务可以是一个应用程序或一个线程。任务可以有自己的代码和数据空间,以及堆栈,但它并没有自己的资源管理和调度控制。任务只作为一个容器存在,在操作系统内核的调度下运行。 -
进程(Process):
进程是指在计算机上运行的一个程序实例。它是资源分配的基本单位,包含了程序执行所需的代码、数据、文件描述符、虚拟地址空间等。每个进程拥有独立的内存空间,它们之间相互隔离,一个进程的崩溃不会影响其他进程。进程可以有自己的多个线程,也可以由单个线程组成。 -
线程(Thread):
线程是进程中的执行单元,是 CPU 调度的基本单位。一个进程中可以包含多个线程,它们共享同一份资源,如代码段、数据段和文件描述符等。线程之间可以共享内存,相互之间可以协调配合完成任务。线程更轻量级,创建和销毁的开销较小,上下文切换也比进程要快。多线程的编程可以提高程序的并发性和响应性。
区别总结如下:
- 任务是操作系统的执行单元,但没有资源管理和调度控制的能力。
- 进程是一个程序的执行实例,拥有独立的内存空间,资源独立,相互隔离。
- 线程是进程内的执行单元,共享进程的资源,协调配合完成任务。
通常情况下,一个进程可以有多个线程,线程共享进程的资源,可以并发执行,但进程之间相互独立。线程的切换开销较小,适合并发操作和多任务处理。而进程的切换相对较大,适合与其他进程相互隔离和独立运行的场景。
1.5 任务VS进程
任务(Task)和进程(Process)是操作系统中两个相关但不完全相同的概念。
下面是任务和进程之间的主要区别:
-
定义:
- 任务是指一个可以独立执行的工作单元,通常与编程语言或应用程序的概念相关。任务可以是一个线程、一个函数或一个执行单元。任务在同一个进程内执行,共享进程的资源。
- 进程是一个执行实例,是操作系统进行资源分配和管理的基本单位。它包含了程序代码、数据、堆栈和进程控制块等信息,拥有独立的虚拟地址空间。
-
关联:
- 任务通常是进程内的执行单元,它们共享相同的虚拟地址空间、文件描述符和其他资源。
- 进程可以包含一个或多个任务,每个任务独立执行特定的计算或操作。每个任务都有自己的执行上下文和堆栈。
-
资源管理:
- 进程拥有独立的虚拟地址空间,每个进程之间相互隔离,一个进程的崩溃不会影响其他进程。
- 任务共享进程的资源,如内存空间、文件描述符。但是在多任务的环境下,任务之间可能需要通过同步和互斥机制来访问共享资源,以避免竞争条件和冲突。
-
调度和管理:
- 进程是操作系统进行资源分配和调度的基本单位,操作系统负责管理进程的创建、销毁、调度和分配资源。
- 任务的创建和管理通常由编程语言或应用程序开发者负责,操作系统则负责调度任务的执行顺序。
-
开销和效率:
- 由于进程拥有独立的虚拟地址空间和其他资源,创建和销毁进程的开销相对较大。进程切换需要保存和恢复大量的上下文信息。
- 任务通常比进程轻量级,创建和销毁任务的开销较小。任务切换只需要保存和恢复任务的上下文信息。
总的来说,任务和进程是相关但不同的概念。进程是操作系统的资源管理单位,任务是进程内的执行单元。任务在进程内部共享资源,进程之间是相互隔离的,互不影响。在设计和实现多任务系统时,理解任务和进程之间的区别对于合理管理资源、提高效率和确保并发执行的正确性非常重要。
1.6 进程 VS 线程
进程(Process)和线程(Thread)是操作系统中两个重要的并发执行概念,它们之间有以下主要区别:
-
定义:
- 进程是程序执行时的一个实例,是操作系统进行资源分配和调度的基本单位。每个进程拥有独立的虚拟地址空间,包含程序代码、数据、堆栈和进程控制块等信息。
- 线程是在进程内的一个执行单元,是进程的实体,是操作系统调度和管理的基本单位。多个线程共享进程的资源,如内存空间和文件描述符。
-
资源管理:
- 进程拥有独立的地址空间,进程之间相互独立,一个进程的崩溃不会影响其他进程。
- 线程共享同一个进程的资源,包括内存空间、文件描述符、打开的文件等。因此,线程之间可以直接进行通信,但也容易出现资源竞争和冲突。
-
切换开销:
- 进程切换(进程上下文切换)会涉及保存和恢复整个进程的状态信息,开销较大。
- 线程切换(线程上下文切换)只需保存和恢复线程的少量上下文信息,开销相对较小。
-
并发性:
- 多个进程之间相互独立,可以并发执行,提高系统的并发性。
- 多个线程共享同一个进程的资源,可以并行执行,利用多核处理器的优势提高程序的性能。
-
通信和同步:
- 进程之间通信比较复杂,通常需要使用进程间通信(IPC)机制,如管道、消息队列、共享内存等。
- 线程之间共享同一地址空间,可以直接读写共享数据,通信相对简单。但需要注意线程间的同步和互斥,避免数据竞争问题。
-
扩展性:
- 线程是轻量级的执行单元,可以更快速地创建、撤销和切换,适合处理需求频繁切换的任务。
- 进程启动和销毁较慢,占用更多系统资源,但也更安全稳定。适合处理长时间运行的任务。
总的来说,进程和线程是操作系统中不同层次的并发执行单元,各自适用于不同的场景和需求。合理地利用进程和线程,可以提高系统的并发性能和响应速度,同时也需要注意线程间的同步和资源管理,避免出现竞争条件和错误。
1.7 任务 进程 线程 发展历史
任务(Task)、进程(Process)和线程(Thread)是计算机科学中重要的概念,它们在操作系统中扮演着不同的角色。下面简要介绍它们的发展历史:
任务(Task):
-
早期计算机系统:在早期的计算机系统中,任务是指一个需要完成的工作单元,通常是一个程序或进程的执行实例。在单任务系统中,整个系统只能执行一个任务,而在多任务系统中,则可以同时执行多个任务。
-
多任务系统:随着计算机系统的发展,多任务系统出现,操作系统可以管理和调度多个任务,让它们并发执行,提高系统的利用率和效率。
进程(Process):
-
概念提出:进程最早由 Dijkstra 在 1960 年代提出,它是一个正在运行中的程序实例,包括代码、数据、堆栈等信息。每个进程拥有独立的地址空间,是操作系统进行资源分配和调度的基本单位。
-
进程管理:操作系统负责管理进程的创建、调度、同步、通信和销毁等操作,为多任务系统的正常运行提供支持。
线程(Thread):
-
引入概念:线程最早由 Sun Microsystems 创造,用于提高程序并发性能。线程是进程中的执行单元,共享进程的地址空间和资源,可以并发执行,并能更高效地利用多核处理器。
-
多线程编程:多线程编程成为现代软件开发中的重要技术,可以提升程序性能、响应速度和资源利用率。
发展趋势:
-
并发性:随着计算机系统的发展,对并发性能的需求越来越高,进程和线程的使用变得普遍。
-
轻量级线程:近年来,轻量级线程技术不断发展,如协程、纤程等,用于实现更轻量、更高效的并发编程模型。
-
云计算和分布式系统:在云计算和分布式系统中,任务、进程和线程的管理变得更加复杂和关键,需要更高级的调度和通信机制。
总的来说,任务、进程和线程是操作系统中重要的概念,它们的发展历史伴随着计算机系统的发展演进,为我们提供了强大的并发编程能力和资源管理机制。
二、不同操作系统中任务、进程、线程
2.1 Linux:没人任务,只有进程与线程
Linux操作系统没有任务的概念。
在Linux操作系统中,进程(Process)和线程(Thread)都是重要的并发执行实体,但在实现和管理上存在着一些区别。
-
进程:
- 在Linux中,进程是程序的一个执行实例。每个进程都有独立的地址空间、文件描述符、堆栈等。进程之间相互隔离,一个进程的崩溃不会影响其他进程。
- 进程是通过fork()系统调用或其他创建进程的方式来创建的,在内核中分配唯一的进程标识符(PID)来标识进程。
- 进程的创建、销毁和调度由操作系统负责,可以独立执行、并发执行和通信。
-
线程:
- 在Linux中,线程是进程内的一个执行单元。同一进程内的线程共享进程的资源,包括地址空间、文件描述符、打开的文件等。线程拥有独立的栈空间,但共享进程的其他资源。
- 线程可以更快速地创建、销毁和切换,因为线程的创建和切换只需保存和恢复少量的上下文信息。
- 线程之间可以直接进行通信,共享相同的内存空间,但也容易出现数据竞争和冲突。因此,线程间需要使用同步和互斥机制,如互斥锁、条件变量等来避免竞态条件。
-
调度和管理:
- 进程的创建和销毁由操作系统调度和管理,包括资源的分配和释放、调度程序的执行顺序等。
- 线程的创建和销毁由进程内的线程库负责,例如pthread库。线程的调度通常由内核的线程调度器负责。
-
轻量级和资源消耗:
- 线程比进程更轻量级,创建和销毁线程的开销较小。线程共享进程的资源,因此线程的创建速度更快,上下文切换的开销更小。
- 进程相对较重量级,创建和销毁进程的开销较大。进程拥有独立的地址空间和资源,需要更多的系统资源来维护和管理。
总的来说,进程和线程在Linux操作系统中都是实现并发执行的重要机制。进程是独立的执行实例,每个进程拥有独立的地址空间,进程间相互隔离;而线程是进程内的执行单元,共享进程的资源,可以更快速地创建、销毁和切换。在设计和实现多任务系统时,需要合理利用进程和线程来提高系统的并发性能和响应速度,同时注意线程间的同步和资源管理,以避免出现数据竞争和错误。
在 Linux 中,进程和线程是通过 fork()、exec() 等系统调用实现的,以下是一些常用的 Linux 进程和线程相关函数:
进程相关函数:
-
fork():创建一个新进程,新进程是调用进程的副本。
pid_t fork(void);
-
exec():用新的程序替换当前进程的内存映像,包括execve()、execvp()、execl()等。
int execve(const char *filename, char *const argv[], char *const envp[]);
-
wait():等待子进程结束,用于阻塞当前进程。
pid_t wait(int *status);
线程相关函数:
-
pthread_create():创建一个新线程。
int pthread_create(pthread_t *thread, const pthread_attr_t *attr, void *(*start_routine)(void*), void *arg);
-
pthread_join():主线程等待指定线程结束。
int pthread_join(pthread_t thread, void **retval);
-
pthread_exit():终止当前线程。
void pthread_exit(void *retval);
-
pthread_cancel():取消指定线程的执行。
int pthread_cancel(pthread_t thread);
-
pthread_mutex_init()和pthread_mutex_lock():线程互斥锁的初始化和加锁。
int pthread_mutex_init(pthread_mutex_t *mutex, const pthread_mutexattr_t *attr);
int pthread_mutex_lock(pthread_mutex_t *mutex);
-
pthread_cond_init()和pthread_cond_wait():线程条件变量的初始化和等待。
int pthread_cond_init(pthread_cond_t *cond, const pthread_condattr_t *attr);
int pthread_cond_wait(pthread_cond_t *cond, pthread_mutex_t *mutex);
这些函数是 Linux 中用于进程和线程管理的一些常用函数。通过这些函数可以创建进程、创建线程、等待进程/线程结束、管理线程同步等操作。
2.2 VxWorks:只有任务,没有进程与线程
VxWorks是一个实时操作系统(RTOS),在其设计中,没有明确的进程和线程概念,而是使用任务(Task)来组织并发执行的单位。
在VxWorks中,任务是最基本的调度单位,每个任务都有自己的代码段、数据段和栈空间。任务之间是相互独立的,每个任务都有自己的任务控制块(Task Control Block,TCB)来保存任务的状态信息。
通过VxWorks提供的任务管理函数,可以创建、删除和切换任务。任务之间的切换是通过调度器来完成的,调度器根据任务的优先级和调度策略来进行任务的切换。
尽管VxWorks没有明确的进程和线程概念,但可以通过使用任务和任务间的通信机制(如消息队列、信号量等),实现进程和线程的一些功能。
需要注意的是,VxWorks是一个实时操作系统,主要用于嵌入式系统和实时应用程序,其设计的重点是实时性和效率。因此,VxWorks采用了较简洁的任务模型,以提供更精确的控制和更低的开销。
在 VxWorks 中,线程管理是非常重要的功能,以下是一些常用的 VxWorks 线程相关函数:
-
taskSpawn():创建一个新的任务(线程),指定任务的入口函数、优先级、堆栈大小等信息。
TASK_ID taskSpawn(char *name, int priority, int options, int stackSize, FUNCPTR entryPt, int arg1, int arg2, int arg3, int arg4, int arg5, int arg6, int arg7, int arg8, int arg9, int arg10);
-
taskDelete():删除一个指定的任务(线程)。
STATUS taskDelete(TASK_ID tid);
-
taskSuspend():挂起一个指定的任务(线程)。
STATUS taskSuspend(TASK_ID tid);
-
taskResume():恢复(唤醒)一个挂起的任务(线程)。
STATUS taskResume(TASK_ID tid);
-
taskDelay():延时指定的系统时间单位(实时时钟滴答数)。
void taskDelay(int ticks);
-
taskSafe():上锁 VxWorks 内核,防止任务被抢占。
int taskSafe();
-
taskUnsafe():解锁 VxWorks 内核,允许任务被抢占。
void taskUnsafe();
-
taskPrioritySet():设置任务的优先级。
STATUS taskPrioritySet(TASK_ID tid, int newPriority);
-
taskVarAdd()和taskVarDelete():为任务添加或删除一个变量。
STATUS taskVarAdd(TASK_ID tid, int *pVar);
STATUS taskVarDelete(TASK_ID tid, int var);
这些函数是 VxWorks 中用于线程管理的一些常用函数。通过这些函数可以创建、删除、挂起、恢复、延时任务等操作。同时也可以设置任务的优先级、加锁解锁内核等。如果有特定的需求或问题,还可以查阅 VxWorks 的官方文档或相关资料以获取更详细的信息。
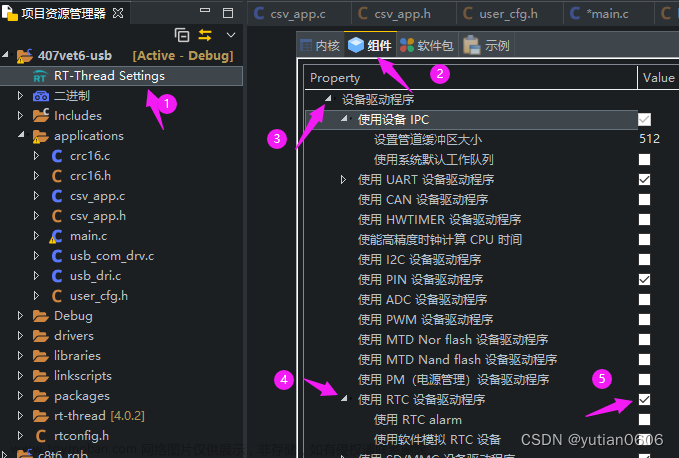
2.3 RT Thread:只有线程,没有任务和进程
RT-Thread(Real-Time Thread)是一个开源的实时嵌入式操作系统,它的设计理念是轻量级、实时、多任务和多线程。在RT-Thread中,没有明确的任务(Task)和进程(Process)的概念,只有线程(Thread)来组织并发执行的单位。
在RT-Thread中,线程是最基本的执行单元,每个线程拥有自己的程序计数器、堆栈、栈指针和其他相关的线程控制块。线程之间可以并发执行,共享系统的资源,通过线程调度器来实现不同线程之间的切换和调度。
RT-Thread提供了丰富的线程管理函数和机制,可以方便地创建、删除、挂起、恢复和切换线程。同时,RT-Thread也支持线程间的通信与同步,例如信号量、邮箱、消息队列等机制,来实现线程之间的数据传递和协作。
由于RT-Thread的设计目标是针对实时嵌入式系统,所以采用了线程模型来简化系统的设计和管理,减少系统的资源开销和提高系统的实时性。开发者可以基于RT-Thread构建符合自己需求的嵌入式应用程序,充分利用多线程的特性来实现任务的并发执行和系统的高效运行。
在RT-Thread中,线程(Thread)是组织并发执行的基本单位。线程可以被称为轻量级任务,它拥有自己的程序计数器、堆栈、栈指针和相关的线程控制块(Tread Control Block,TCB)。
下面是RT-Thread中线程的一些重要特点和相关操作:
-
线程创建:可以使用RT-Thread提供的API函数来创建线程。例如,
rt_thread_create()函数可以用于创建一个新的线程,并指定线程的入口函数、参数、优先级等。 -
线程调度:RT-Thread的线程调度器根据线程的优先级和调度策略来进行线程的调度。当多个线程同时可执行时,调度器会根据优先级确定下一个要执行的线程。
-
线程切换:RT-Thread的线程切换是通过上下文保存和恢复来实现的。当一个线程被中断、阻塞或时间片耗尽时,调度器会保存当前线程的上下文信息,并选择下一个要执行的线程,并恢复其上下文。
-
线程优先级:RT-Thread中的线程可以具有不同的优先级。较高优先级的线程将在较低优先级的线程之前得到更多的执行时间。线程的优先级可以通过指定相应的参数在创建线程时设置。
-
线程挂起和恢复:可以使用相应的API函数来挂起和恢复线程的执行。挂起线程后,它将暂停执行,直到显式恢复或取消挂起操作为止。
-
线程同步与通信:RT-Thread提供了一些同步和通信机制,如信号量、邮箱、消息队列等。这些机制可以在多个线程之间实现数据共享和互斥访问,以实现线程间的协作和通信。
通过使用线程,RT-Thread提供了一种方便而灵活的并发编程模型。开发者可以创建多个线程来执行不同的任务或功能,并通过线程间的通信和同步机制进行数据传递和协调,以实现复杂的嵌入式应用程序。
在 RT-Thread 中,主要用于线程管理的一些常用函数如下:文章来源:https://www.toymoban.com/news/detail-832709.html
-
rt_thread_create():创建一个线程,指定线程的入口函数、参数、堆栈大小、优先级等信息。
rt_thread_t rt_thread_create(const char *name, void (*entry)(void *parameter), void *parameter, rt_uint32_t stack_size, rt_uint8_t priority, rt_uint32_t tick);
-
rt_thread_delete():删除指定的线程。
rt_err_t rt_thread_delete(rt_thread_t thread);
-
rt_thread_startup():启动线程,使其开始执行。
rt_err_t rt_thread_startup(rt_thread_t thread);
-
rt_thread_yield():当前线程主动放弃 CPU 执行权,让出执行。
void rt_thread_yield(void);
-
rt_thread_sleep():线程休眠,在指定的系统时钟节拍数后唤醒。
rt_err_t rt_thread_sleep(rt_tick_t tick);
-
rt_thread_delay():线程延时,在指定的毫秒数后唤醒。
void rt_thread_delay(rt_tick_t ms);
-
rt_thread_mdelay():以毫秒为单位的线程延时,和rt_thread_delay()功能类似。
void rt_thread_mdelay(rt_uint32_t ms);
-
rt_thread_control():控制线程的行为,如挂起、唤醒等操作。
rt_err_t rt_thread_control(rt_thread_t thread, int cmd, void *arg);
这些是 RT-Thread 中用于线程管理的一些常用函数,通过这些函数可以实现线程的创建、删除、调度、休眠等操作。在实际应用中,可以根据需要结合这些函数来管理线程,实现多线程的并发执行及相关的功能。如果有特定的需求或问题,也可以查阅 RT-Thread 的官方文档或相关资料获取更详细的信息。文章来源地址https://www.toymoban.com/news/detail-832709.html
到了这里,关于[嵌入式系统-32]:RT-Thread -17- 任务、进程、线程的区别的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!