时间记录:2024/2/8
一、PWM介绍
(1)脉冲宽度调制
(2)占空比:高电平时间占整个周期时间的比例
(3)STM32通过定时器实现PWM时具有两种模式
PWM1模式:向上计数模式下,CNT当前计数寄存器的值小于CCR比较寄存器的值时输出有效电平,大于时输出无效电平,向下计数模式下,CNT当前计数寄存器的值小于CCR比较寄存器的值时输出无效电平,大于时输出有效电平
PWM2模式:向上计数模式下,CNT当前计数寄存器的值小于CCR比较寄存器的值时输出无效电平,大于时输出有效电平,向下计数模式下,CNT当前计数寄存器的值小于CCR比较寄存器的值时输出有效电平,大于时输出无效电平
二、180°舵机介绍
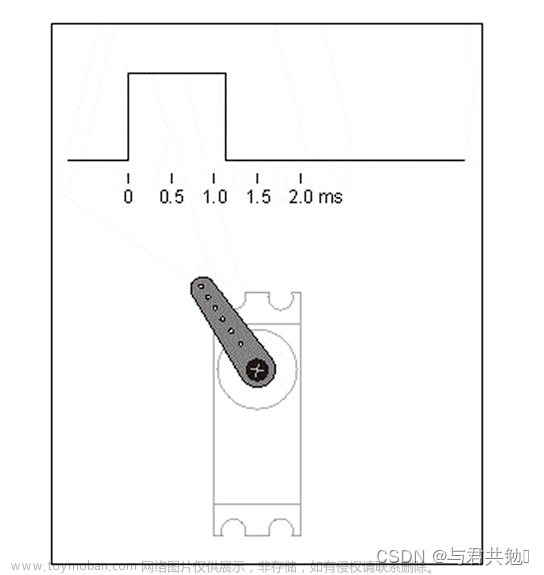
(1)以20ms为时基,通过改变不同的占空比改变舵机转动角度
(2)占空比对应角度
| 高电平时间 | 角度 | 占空比 |
|---|---|---|
| 0.5ms | 0 | 2.5 |
| 1ms | 45° | 5 |
| 1.5ms | 90° | 7.5 |
| 2ms | 135° | 10 |
| 2.5ms | 180° | 12.5 |
三、示例代码(以PA0-TIM2CH1为例)
(1)头文件
#ifndef __SERVO_H__
#define __SERVO_H__
#include "stm32f10x.h"
void vServoInit(void);
void vSetAngle(float angle);
#endif
(2)源文件文章来源:https://www.toymoban.com/news/detail-832718.html
#include "servo.h"
#include <math.h>
void vServoInit(void)
{
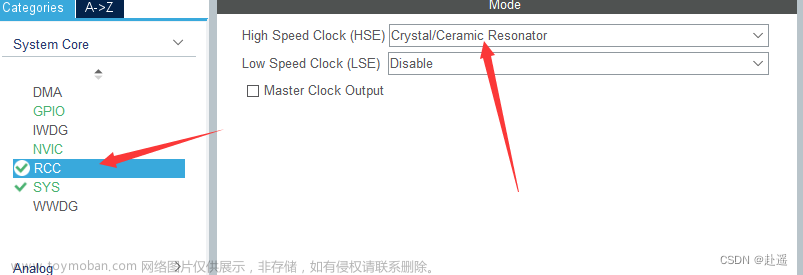
//1.使能定时器x和相关IO口时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//PAO - Timer2CH1
//4.初始化定时器
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up;//向上计数
TIM_TimeBaseInitStruct.TIM_Period=20000-1;
TIM_TimeBaseInitStruct.TIM_Prescaler=72-1;//20ms
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
//TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;//高级定时器使用
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct);
//2.初始化IO口的复用功能
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽输出模式
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
//5.初始化输出比较参数
TIM_OCInitTypeDef TIM_OCInitStruct;
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;//PWM模式,模式1 向上计数时:CNT < CCR1 则输出有效电平,否则输出无效电平
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;//比较输出极性,设置有效电平为高电平还是低电平
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;//比较输出使能
TIM_OCInitStruct.TIM_Pulse = 500;//比较值,写CCRx
TIM_OC1Init(TIM2,&TIM_OCInitStruct);//CH1使用OC1
//6.使能预装载寄存器
TIM_OC1PreloadConfig(TIM2,TIM_OCPreload_Enable);
//7.使能自动重装载的预装载寄存器允许位,使比较寄存器ARR立即生效,否则下个比较周期生效
TIM_ARRPreloadConfig(TIM2,ENABLE);
//8.使能定时器
TIM_Cmd(TIM2,ENABLE);
}
void vSetAngle(float angle)
{
int ccrCount;
ccrCount = (int)round(11.111111*angle+500);
TIM_SetCompare1(TIM2,ccrCount);
}
四、MDK5配置逻辑分析仪观察端口输出波形
(1)小扳手修改“Debug”的一些参数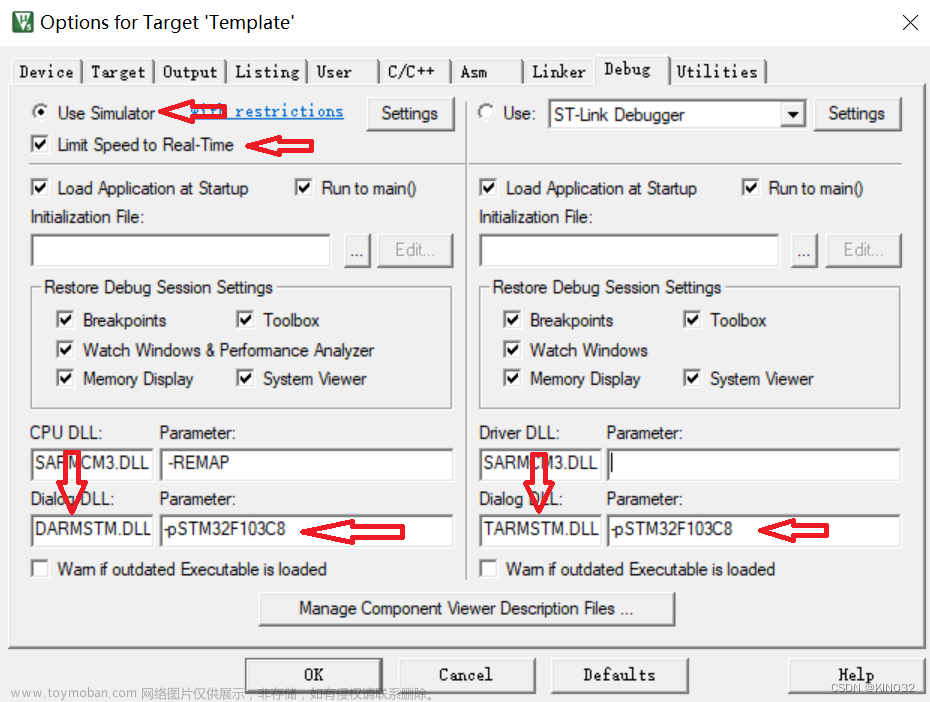
(2)打开Debug界面,打开Logic Analyzer逻辑分析仪界面

(3)点击setup设置要观察的端口,输入PORTA.0表示PA0端口,会自动转换为PORTA&0x00000001形式,显示类型选择Bit位

(4)关闭设置界面,全速运行程序观察波形 文章来源地址https://www.toymoban.com/news/detail-832718.html
文章来源地址https://www.toymoban.com/news/detail-832718.html
到了这里,关于STM32输出PWM波控制180°舵机的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!


![12.[STM32]PWM脉宽调制-舵机控制(一篇足以)](https://imgs.yssmx.com/Uploads/2024/01/414539-1.png)