机器人传感器
移动机器人配备了大量传感器,使它们能够看到和感知周围的环境。这些传感器获取的信息可用于构建和维护环境地图、在地图上定位机器人以及查看环境中的障碍物。这些任务对于能够安全有效地在动态环境中导航机器人至关重要。
机器人的传感器类似人的感官,眼睛 和 嗅觉 等等
常用传感器的示例包括激光雷达、雷达、RGB 摄像头、深度摄像头、IMU 和 GPS。为了标准化这些传感器的消息格式并允许供应商之间更轻松地进行互操作,ROS 提供了sensor_msgs定义通用传感器接口的包。这也允许用户使用任何传感器供应商,只要它遵循sensor_msgs. 在下一小节中,我们将介绍一些导航中常用的消息,即sensor_msgs/LaserScan、sensor_msgs/PointCloud2、sensor_msgs/Range和sensor_msgs/Image。
除了软件包之外sensor_msgs,您还应该了解radar_msgs一些标准接口。vision_msgs它radar_msgs 定义了雷达专用传感器的消息,而该vision_msgs包定义了计算机视觉中使用的消息,例如对象检测、分割和其他机器学习模型。此包支持的消息有vision_msgs/Classification2D、vision_msgs/Classification3D、vision_msgs/Detection2D和vision_msgs/Detection3D,仅举几例。
您的物理机器人的传感器可能具有为其编写的 ROS 驱动程序(例如,连接到传感器、将数据填充到消息中并发布它们以供您的机器人使用的 ROS 节点),这些驱动程序遵循包中的标准接口sensor_msgs。该sensor_msgs套件使您可以轻松使用来自不同制造商的多种不同传感器。然后,像 Nav2 这样的通用软件包就可以读取这些标准化消息并独立于传感器硬件执行任务。在诸如 之类的模拟机器人上sam_bot,Gazebo 具有传感器插件,它们也会在包之后发布其信息sensor_msgs。
常见传感器消息
sensor_msgs在本小节中,我们将讨论您在设置 Nav2 时可能遇到的一些常见类型。我们将为每个传感器提供简要描述、Gazebo 中模拟的图像以及 RViz 中传感器读数的相应可视化。
sensor_msgs 除了下面列出的类型之外,还有其他类型。完整的消息列表及其定义可以在sensor_msgs 文档中找到。
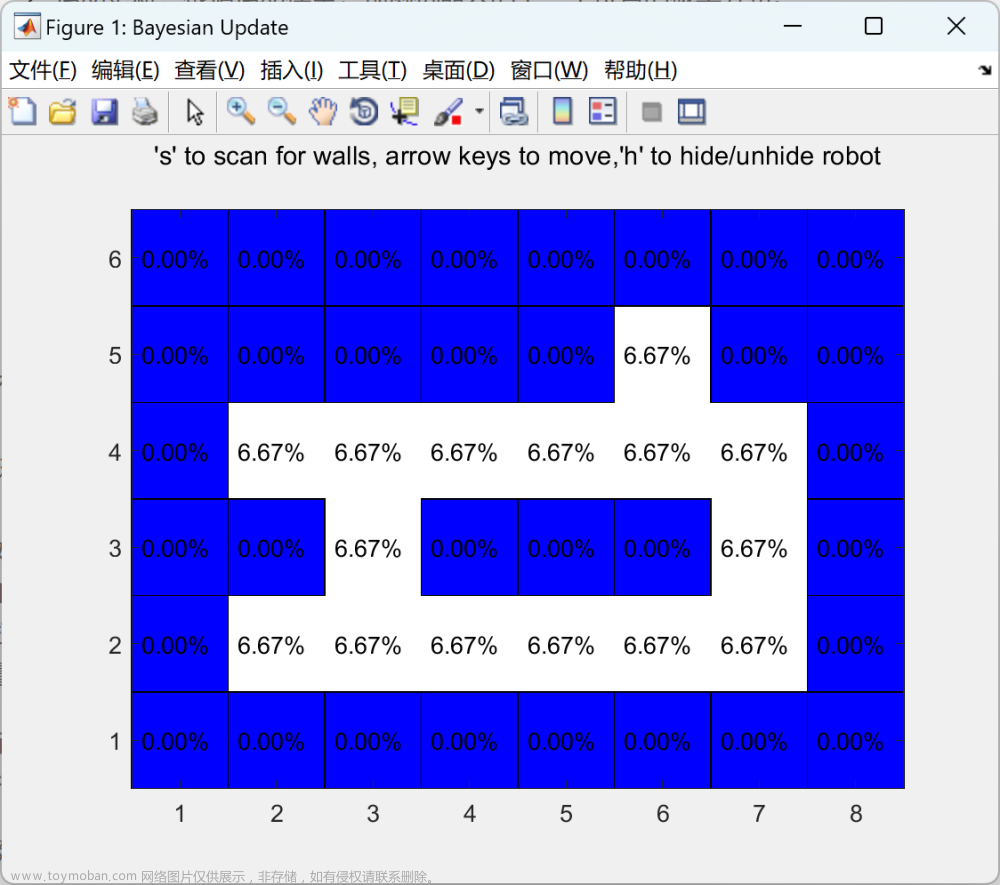
传感器消息/激光扫描
此消息代表平面激光测距仪的单次扫描。该消息用于slam_toolbox定位nav2_amcl和绘图,或用于
nav2_costmap_2d 感知。

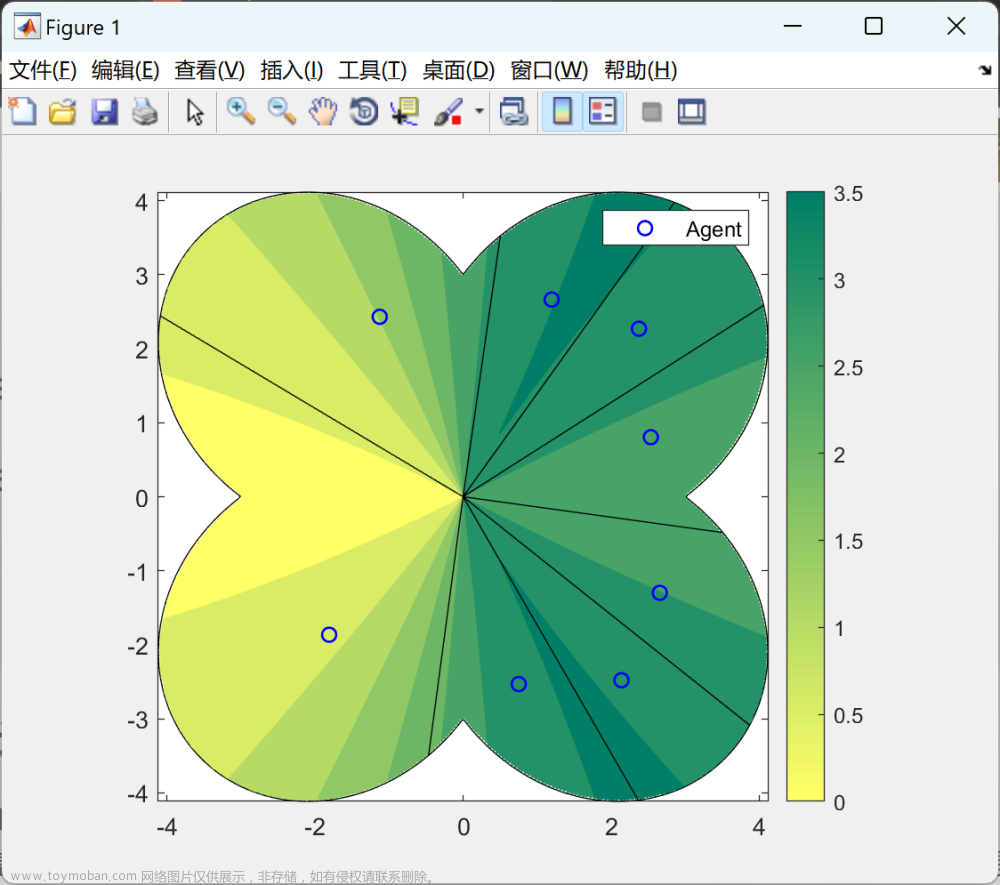
sensor_msgs/PointCloud2
该消息包含 3D 点的集合,以及有关每个点的可选附加信息。这可以来自 3D 激光雷达、2D 激光雷达、深度相机或更多。

传感器消息/范围
这是来自活动测距仪的单个距离读数,该测距仪发射能量并报告沿测量距离的弧线有效的一个距离读数。声纳、红外传感器或一维测距仪是使用此消息的传感器的示例。

传感器消息/图像

参考地址:文章来源:https://www.toymoban.com/news/detail-833696.html
https://navigation.ros.org/setup_guides/sensors/setup_sensors.html#sensor-introduction文章来源地址https://www.toymoban.com/news/detail-833696.html
到了这里,关于nav02 学习03 机器人传感器的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!