⛄一、获取代码方式
获取代码方式1:
完整代码已上传我的资源:【轨迹跟踪】基于matlab模型预测控制MPC无人机轨迹跟踪【含Matlab源码 3958期】
点击上面蓝色字体,直接付费下载,即可。
获取代码方式2:
付费专栏Matlab物理应用(初级版)
备注:
点击上面蓝色字体付费专栏Matlab物理应用(初级版),扫描上面二维码,付费29.9元订阅海神之光博客付费专栏Matlab物理应用(初级版),凭支付凭证,私信博主,可免费获得1份本博客上传CSDN资源代码(有效期为订阅日起,三天内有效);
点击CSDN资源下载链接:1份本博客上传CSDN资源代码
⛄二、部分源代码
% 利用MPC跟踪轨迹
clc
clear
close all
load path.mat
%% 初始参数
dt = 0.1; % 时间步长
L = 2.9; % 轴距
max_steer =60 * pi/180; % in rad
target_v =30.0 / 3.6;
%% 参考轨迹的相关参数
% 定义参考轨迹
refPos = path;
refPos_x = refPos(:,1);
refPos_y = refPos(:,2);
% 计算航向角和曲率
diff_x = diff(refPos_x) ;
diff_x(end+1) = diff_x(end);
diff_y = diff(refPos_y);
diff_y(end+1) = diff_y(end);
derivative1 = gradient(refPos_y) ./ abs(diff_x); % 一阶导数
derivative2 = del2(refPos_y) ./ abs(diff_x); % 二阶导数
refHeading = atan2(diff_y , diff_x); % 航向角
refK = abs(derivative2) ./ (1+derivative1.2).(3/2); % 计算曲率
% 根据阿克曼转向原理,计算参考前轮转角
refDelta = atan(L*refK);
% 绘图
figure
plot(refPos_x,refPos_y,‘r-’)
hold on
%% 主程序
x = refPos_x(1)+0.5;
y = refPos_y(1) + 0.5;
yaw = refHeading(1)+0.02;
v = 0.1;
U = [0.01;0.01];
idx =0;
pos_actual = [refPos_x,refPos_y];
latError_MPC = [];
% 循迹
while idx < length(refPos_x)-1
% 调用MPC控制器
[Delta,v,idx,latError,U] = mpc_control(x,y,yaw,refPos_x,refPos_y,refHeading,refDelta,dt,L,U,target_v) ;
% 误差太大,退出程序
if abs(latError) > 3
disp('误差过大,退出程序!\n')
break
end
% 更新状态量
[x,y,yaw] = updateState(x,y,yaw,v , Delta, dt,L, max_steer);
% 保存每一步的实际量
pos_actual(end+1,:) = [x,y];
latError_MPC(end+1,:) = [idx,latError];
% 画跟踪轨迹图
scatter(x,y,150,'b.')
pause(0.01);
end
%% 保存
path_MPC = pos_actual;
save path_MPC.mat path_MPC
save latError_MPC.mat latError_MPC
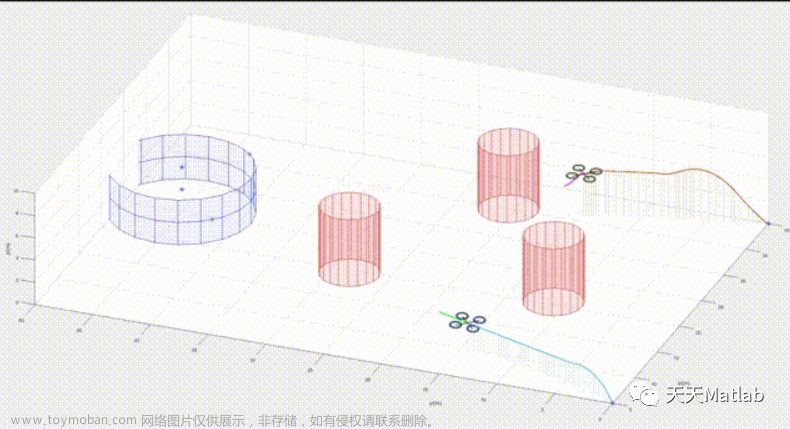
⛄三、运行结果

⛄四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1]王宇航,李晓峰.无人机轨迹跟踪控制方法研究综述[J].2018文章来源:https://www.toymoban.com/news/detail-833900.html
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除文章来源地址https://www.toymoban.com/news/detail-833900.html
到了这里,关于【轨迹跟踪】模型预测控制MPC无人机轨迹跟踪【含Matlab源码 3958期】的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!