四、HAL库外设初始化MSP回调机制(了解)


五、HAL库中断回调机制(了解)



六、USART/UART异步通信配置步骤(掌握)

HAL_UART_Init()

HAL_UART_MspInit() //配置GPIO、NVIC、CLOCK等

HAL_UART_Receive_IT()

HAL_NVIC_SetPriority()、 HAL_NVIC_EnableIRQ()

USARTx_IRQHandler()、 UARTx_IRQHandler()

USART_DR, HAL_UART_Transmit()



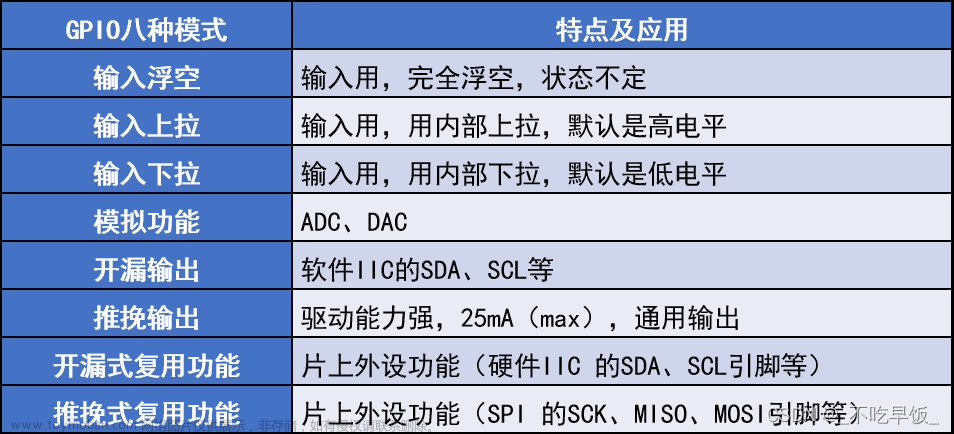
七、IO引脚复用功能(掌握)


八、编程实战:通过串口接收或者发送一个字符(掌握)
串口X初始化函数文章来源:https://www.toymoban.com/news/detail-834981.html
/* 接收缓冲, 最大USART_REC_LEN个字节. */
uint8_t g_usart_rx_buf[USART_REC_LEN];
/* 接收状态
* bit15, 接收完成标志
* bit14, 接收到0x0d
* bit13~0, 接收到的有效字节数目
*/
uint16_t g_usart_rx_sta = 0;
uint8_t g_rx_buffer[RXBUFFERSIZE]; /* HAL库使用的串口接收缓冲 */
UART_HandleTypeDef g_uart1_handle; /* UART句柄 */
/**
* @brief 串口X初始化函数
* @param baudrate: 波特率, 根据自己需要设置波特率值
* @note 注意: 必须设置正确的时钟源, 否则串口波特率就会设置异常.
* 这里的USART的时钟源在sys_stm32_clock_init()函数中已经设置过了.
* @retval 无
*/
void usart_init(uint32_t baudrate)
{
/*UART 初始化设置*/
g_uart1_handle.Instance = USART_UX; /* USART_UX */
g_uart1_handle.Init.BaudRate = baudrate; /* 波特率 */
g_uart1_handle.Init.WordLength = UART_WORDLENGTH_8B; /* 字长为8位数据格式 */
g_uart1_handle.Init.StopBits = UART_STOPBITS_1; /* 一个停止位 */
g_uart1_handle.Init.Parity = UART_PARITY_NONE; /* 无奇偶校验位 */
g_uart1_handle.Init.HwFlowCtl = UART_HWCONTROL_NONE; /* 无硬件流控 */
g_uart1_handle.Init.Mode = UART_MODE_TX_RX; /* 收发模式 */
HAL_UART_Init(&g_uart1_handle); /* HAL_UART_Init()会使能UART1 */
/* 该函数会开启接收中断:标志位UART_IT_RXNE,并且设置接收缓冲以及接收缓冲接收最大数据量 */
HAL_UART_Receive_IT(&g_uart1_handle, (uint8_t *)g_rx_buffer, RXBUFFERSIZE);
}
UART底层初始化函数文章来源地址https://www.toymoban.com/news/detail-834981.html
/**
* @brief UART底层初始化函数
* @param huart: UART句柄类型指针
* @note 此函数会被HAL_UART_Init()调用
* 完成时钟使能,引脚配置,中断配置
* @retval 无
*/
void HAL_UART_MspInit(UART_HandleTypeDef *huart)
{
GPIO_InitTypeDef gpio_init_struct;
if (huart->Instance == USART_UX) /* 如果是串口1,进行串口1 MSP初始化 */
{
USART_TX_GPIO_CLK_ENABLE(); /* 使能串口TX脚时钟 */
USART_RX_GPIO_CLK_ENABLE(); /* 使能串口RX脚时钟 */
USART_UX_CLK_ENABLE(); /* 使能串口时钟 */
gpio_init_struct.Pin = USART_TX_GPIO_PIN; /* 串口发送引脚号 */
gpio_init_struct.Mode = GPIO_MODE_AF_PP; /* 复用推挽输出 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* IO速度设置为高速 */
HAL_GPIO_Init(USART_TX_GPIO_PORT, &gpio_init_struct);
gpio_init_struct.Pin = USART_RX_GPIO_PIN; /* 串口RX脚 模式设置 */
gpio_init_struct.Mode = GPIO_MODE_AF_INPUT;
HAL_GPIO_Init(USART_RX_GPIO_PORT, &gpio_init_struct); /* 串口RX脚 必须设置成输入模式 */
#if USART_EN_RX
HAL_NVIC_EnableIRQ(USART_UX_IRQn); /* 使能USART1中断通道 */
HAL_NVIC_SetPriority(USART_UX_IRQn, 3, 3); /* 组2,最低优先级:抢占优先级3,子优先级3 */
#endif
}
}
到了这里,关于stm32——hal库学习笔记(串口<二>)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!