一、位图
1.1 位图(bitset)的提出
哈希是一种映射的思想。
先来看一道题:给40亿个不重复的无符号整数,没排序过。给一个无符号整数,如何快速判断一个数是否在这40亿个数中。
首先想到的解法可能有这几种:
解法1:遍历40亿个数,O(N)
解法2:先排序,快排O( N l o g 2 N Nlog_2N Nlog2N),再利用二分查找O( l o g 2 N log_2N log2N)
解法3:40亿个数放进set/unordered_set中,然后查找key在不在
思考:上面的解法看似可行,实际上有很大的问题,内存消耗太大。
40亿个整数要占用多少空间?大约16GB
- 1GB=102410241024= 2 10 ∗ 2 10 ∗ 2 10 2^{10}*2^{10}*2^{10} 210∗210∗210= 2 30 2^{30} 230 (大约是10亿byte)
- 4GB=4* 2 30 2^{30} 230= 2 32 2^{32} 232byte(大约是42亿9千多万byte)
- 40亿个unsigned int整数=40亿4字节=160亿字节=1610亿字节≈16GB
这40亿个数据是放在文件中的,要对这40亿个整数进行排序:
- 难道在内存中开一个16GB空间的数组存放这些数据吗?显然不太现实,内存消耗太大,玩不起。
- 虽然归并排序可以对文件中的数据做外排序,但是效率很低,磁盘读写速度是很慢的,即使在文件中对40亿个数据排完了序,但是很难去算数据的下标位置,不能进行二分查找,那意义也不大了。
但是很难去算数据的下标位置,不能进行二分查找,那意义也不大了。
解法三,把数据放进set/unordered_set中,因为其底层是链式结构,除了存数据,还要存指针,所以附带的内存消耗更大,需要的空间比16GB还要大很多,更不可行。
所以我们一定要从节省内存的角度出发去思考,才能更好的解决问题。同时题目要求是:快速判断。
这里是判断一个数在不在数据集中,仔细想一想,也并不需要把这个数存起来,只需要有个标记去标记某个数在不在就行了。(就好比统计数组中数字的出现次数,我们用数的数值作为下标,在该下标处存储出现的次数,也并没有把数存下来)
标记一个数在不在,最小的标记单位是比特位(0/1),我们用一个比特位标记一个数,这样就节省空间了。
解法4:位图
某个数是否在给定的数据集中,有两种结果:存在或不存在,刚好是两种状态,那么可以使用一个二进制比特位来代表某个数是否存在的信息,比如二进制比特位为1代表存在,为0代表不存在。
我们把数据集的所有数用直接定址法映射到一张二进制表中,并用二进制值(1/0)标记其是否存在,这样每个数都有唯一的映射位置,不会出现哈希冲突。如果要判断某个数在不在数据集中,只需要找到这个数映射到表中的位置,然后查看该位置的比特位为1还是0。
我们是用每个无符号整数unsigned int的值来映射其哈希位置(比如25,就映射到第25个二进制位):
- 因为unsigned int 的取值范围是0~ 2 32 2^{32} 232 -1,所以一个无符号整数最小值为0,最大值为 2 32 2^{32} 232-1(4,294,967,295,42亿9千多万)。
- 所以我们要开有 2 32 2^{32} 232个二进制位的表,才能映射完所有的无符号整数,但实际上只能开到有 2 32 2^{32} 232-1个二进制位的表(因为size_t最大为0xffffffff),也就是开( 2 32 2^{32} 232-1)/8个字节≈5亿多个字节≈0.5GB=512MB的内存空间。
一个bit位标记一个unsigned int值,512GB的内存就可以标记完42亿9千多万个整数的存在状态了,极大的节省了内存。
注意:位图并没有把整个数据集存储起来,而是将所有数映射到哈希表中,在映射的哈希位置上标记这个数在不在。
1.2 位图的概念
面对判断一个数在不在海量数据中的问题,红黑树和哈希表查找效率是挺高的,但是我们光把海量数据存起来够呛,同时红黑树和哈希表附带的内存消耗,所需空间更大,基于这样的原因,提出了位图这种数据结构。
template <size_t N>
class bitset
{
public:
//...
private:
vector<char> _bits;
};
位图(bitset)是一种常见的数据结构,在给一个很大范围的数,判断其中的一个数是不是在其中。在索引、数据压缩方面有很大的应用。
位图是用数组实现的,数组的每一个元素的每一个二进制位都表示一个数据,0表示该数据不存在,1表示该数据存在。
位图最大的特点就是:快、节省空间,因为它不需要存储数据集,只要标记某个数在不在这个数据集中。
1.3 位图的模拟实现
1.3.1 位图的底层结构
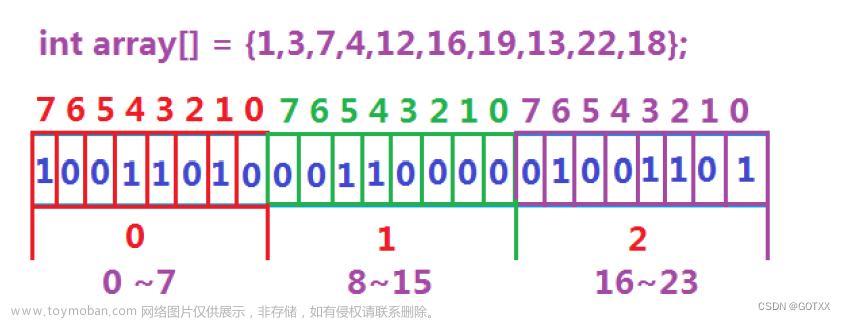
如图,我们开一个数组,数组的每个元素是一个char(8个bit位),当然,是一个int(32个bit位)也可以,只是计算数据映射的比特位的方法略有差别。

思考:如何计算这个数据映射在数组中第几个char(字节)中的第几个比特位上:
- 字节位置=数据/8,得出x映射在第几个char中
- 位位置=数据%8,得出x映射在这个char中的第几个比特位上
- 注意:如果数组的每个元素是一个int,改成除以32就好了
比如数据x=10,则:
- 字节位置=10/8=1,说明10映射在第1个char(字节)中
- 位位置=10%8=2,说明10映射在第1个char(字节)中的第2个比特位上
1.3.2 位图的成员函数
1.3.2.1 位图的构造
默认构造函数:
bitset()
{
_bits.resize(N / 8 + 1, 0);
}
1.3.2.2 位图的插入:set
set函数:
修改数据映射的比特位位置。位位置从最右边的位开始计数,即从0位置开始计数
void set(size_t x)
{
size_t i = x / 8;
size_t j = x % 8;
_bits[i] |= (1 << j);
}
1.3.2.3 位图的删除:reset
reset函数:
修改数据映射的比特位位置,位位置从最右边的位开始计数,即从0位置开始计数
void reset(size_t x)
{
size_t i = x / 8; //计算x映射的位在第i个char数组位置
size_t j = x % 8; //计算x映射的位在这个char的第j个比特位
_bits[i] &= ~(1 << j);
}
1.3.2.4 位图的查找:test
test函数:检测数据x映射的比特位是否为1,即数据x是否存在
bool test(size_t x)
{
size_t i = x / 8;
size_t j = x % 8;
return _bits[i] & (1 << j);
}
1.3.3 位图的优缺点
优点:
1、速度快、节省空间
缺点:
1、只能映射整形,其他类型如:浮点数、string等等不能存储映射
1.4 位图的应用
1.快速查找某个数据是否在一个集合中
2.排序
3.求两个集合的交集、并集等
4.操作系统中磁盘块标记
二、布隆过滤器
2.1 布隆过滤器(BloomFilter)的提出
我们在使用新闻客户端看新闻时,它会给我们不停地推荐新的内容,它每次推荐时要去重,去掉那些已经看过的内容。问题来了,新闻客户端推荐系统如何实现推送去重的?用服务器记录了用户看过的所有历史记录,当推荐系统推荐新闻时会从每个用户的历史记录里进行筛选,过滤掉那些已经存在的记录。如何快速查找到已经存在的记录呢?
判断一个元素是不是在一个集合里,这是一个典型的key模型。
思路1:用哈希表存储用户记录,缺点:浪费空间。
思路2:用位图存储用户记录,缺点:不能处理哈希冲突
思路3:将哈希与位图结合,即布隆过滤器。
场景一:现在有1亿个IP地址(字符串),给你一个IP,需要快速判断这个IP在不在其中,如何处理?
思路1:哈希切分。太慢了,还有没有更快的办法呢?
思路2:用一个字符串哈希算法,把IP地址转换成可以取模的整形(size_t),然后映射到位图的某一个比特位中,进行标记,0表示这个IP不存在,1表示这个IP存在。
问题是:如果不同的IP地址映射的是同一个比特位,会发生哈希冲突,可能存在误判:
- 判断一个值是否在,就是判断其映射的比特位是否为1。判断结果是不准确的,可能存在误判。
- 判断一个值是否不在,就是判断其映射的比特位是否为0。判断结果一定是准确的。(因为如果这个值在,其映射的比特位一定是1)
那该怎么办呢?布隆左思右想,发现想要判断一个值是否在,变得一定是准确得,几乎是不可能得。
因为总会存在哈希冲突。
虽然无法解决冲突,但是可以缓解冲突。
解决思路2的改进:
一个IP映射位图中的一个比特位,冲突概率大,误判概率大。
那么我们对同一个IP使用不同的哈希算法,让其映射多个比特位,缓解冲突,降低误判的概率。
虽然还存在一定的误判,但至少节省了空间。
场景二:判断一个人是不是这个学校的学生:
- 思路1:用[姓名]作为标识,来表示一个人,万一同姓名的人比较多,就会导致误判
- 思路2:用[姓名]、[性别]、[出生年月]作为标识,来表示一个人,同姓名的人比较多容易导致误判,而同姓名同性别同出生年月的人,可能有,但没有那么多,这样就缓解了冲突,降低误判概率。
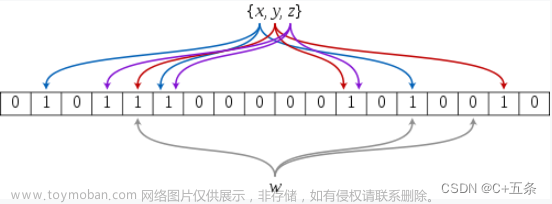
核心思想:一个值映射多个位
2.2 BloomFilter的概念
布隆过滤器是由布隆在1970年提出的一种紧凑型的、比较巧妙的概率型数据结构,特点是高效地插入和查询,它的实现是一个很长的二进制向量(位数组)和一系列哈希函数
可以用来快速判断”一个元素一定不存在或者可能存在一个集合中“,它是用多个哈希函数,将一个数据映射到位图结构中。此种方式不仅可以提升查询效率,也可以节省大量的内存空间。
- 优点:是空间效率和查询时间O(1)都比一般的算法要好的多。
- 缺点:是有一定的误识别率和删除困难。

核心思想:一个值映射多个位。
先思考:
1.哈希函数的个数需要权衡一下,映射的位越多,冲突的概率也越低,但是消耗的空间也越大;但是映射的位少,误判率就会变高,那映射多少位是合理的呢?
2.布隆过滤器的底层就是一个位数组,一次性开Oxffffffff个位空间也没必要,很浪费,那如何控制开多少个位是合理的呢?
如何选择哈希函数个数和布隆过滤器的长度

比如:规定哈希函数个数k=3,布隆过滤器长度m=(k/ln2)n≈4.2n(大约是插入元素个数的4.2倍)
2.3 BloomFilter的优缺点
2.3.1 BloomFilter的优点
1.增加和查询元素的时间复杂度为:O(K),[K为哈希函数的个数,一般比较小],与数据量大小无关。
2.哈希函数互相之间没有关系,方便硬件并行运算。
3.布隆过滤器不需要存储元素本身,在某些对保密要求比较严格的场合有很大优势
4.在能够承受一定的误判时,布隆过滤器比其他数据结构有着很大的空间优势
5.数据量很大时,布隆过滤器可以表示全集,其他数据结构不能
6.使用同一组散列函数的布隆过滤器可以进行交、并、差运算
2.3.2 BloomFilter的缺点
1.有误判率,即存在假阳性,即不能准确判断元素是否在集合中(补救方法:再建立一个白名单,存储可能会误判的数据)
2.不能获取元素本身
3.一般情况下不能从布隆过滤器中删除元素
4.如果采用计数方式删除,可能会存在计数回绕问题
2.4 BloomFilter的模拟实现
2.4.1 BloomFilter的底层结构
布隆过滤器的插入元素可能是字符串,也可能是其他类型,只要提供对应的哈希函数将该类型的数据转换成整形就可以了。
一般情况下布隆过滤器都是用来处理字符串的,所以布隆过滤器可以实现为一个模板类,将模板参数T的缺省类型设置为string
这里布隆过滤器提供三个哈希函数,由于布隆过滤器一般处理的时字符串类型的数据,所以我们默认提供几个将字符串转换成整形的哈希函数:选取综合评分最高的BKDRHash、APHash和DJBhash这三个哈希算法:
struct BKDRHash
{
size_t operator()(const string& s)
{
size_t hash = 0;
for (auto ch : s)
{
hash += ch;
hash *= 31;
}
return hash;
}
};
struct APHash
{
size_t operator()(const string& s)
{
size_t hash = 0;
for (long i = 0; i < s.size(); i++)
{
size_t ch = s[i];
if ((i & 1) == 0)
{
hash ^= ((hash << 7) ^ ch ^ (hash >> 3));
}
else
{
hash ^= (~((hash << 11) ^ ch ^ (hash >> 5)));
}
}
return hash;
}
};
struct DJBHash
{
size_t operator()(const string& s)
{
size_t hash = 5381;
for (auto ch : s)
{
hash += (hash << 5) + ch;
}
return hash;
}
};
//N最多会插入key数据的个数
template<size_t N,class K=string ,class Hash1= BKDRHash, class Hash2= APHash, class Hash3= DJBHash>
class BloomFilter
{
public:
//...
private:
static const size_t _X = 4;
bitset <N*_X> _bs;
};
2.4.2 BloomFilter的插入:set
布隆过滤器复用bitset的set接口用于插入元素,插入元素时,我们通过上面的三个哈希函数分别计算出该元素对应的三个比特位,然后在位图中设置位1即可:
void set(const K& key)
{
size_t len = N * _X;
size_t hash1 = Hash1()(key) % len;
_bs.set(hash1);
size_t hash2 = Hash2()(key) % len;
_bs.set(hash2);
size_t hash3 = Hash3()(key) % len;
_bs.set(hash3);
cout << hash1 << " " << hash2 << " " << hash3 << endl;
}
2.4.3 BloomFilter的查找:test
通过三个哈希函数分别算出对应元素的三个哈希地址,得到对应的比特位,然后去判断这三个比特位是否都被设置成了1。
如果出现一个比特位未被设置成1说明该元素一定不存在,也就是如果一个比特位为0就是false;而如果三个比特位全部都被设置,则return true表示该元素已经存在(注:可能会出现误判)
bool test(const K& key)
{
size_t len = N * _X;
size_t hash1 = Hash1()(key) % len;
if (!_bs.test(hash1))
{
return false;
}
size_t hash2 = Hash2()(key) % len;
if (!_bs.test(hash2))
{
return false;
}
size_t hash3 = Hash3()(key) % len;
if (!_bs.test(hash3))
{
return false;
}
//在 不准确的,存在误判
//不在 准确的
return true;
}
2.4.4 测试BloomFilter的误判率
相似字符串的误判率:测试发现,哈希函数个数和插入元素个数确定情况下,布隆过滤器长度越长,误判率越低。
void test_bloomfilter2()
{
BloomFilter<100> bf; // 最多向布隆过滤器中插入100个元素
// 1、构造100个不同的字符串,存放到 v1 中
vector<string> v1;
for (size_t i = 0; i < 100; i++)
{
string url = "https://www.bilibili.com/";
url += std::to_string(123 + i); // 构造出100个不同的字符串
v1.push_back(url);
}
// 把100个不同的字符串插入到布隆过滤器中
for (const auto& e : v1) bf.set(e);
/*--------------------------------------------------------*/
// 2、构造100个不同的相似字符串,存放到 v2 中
vector<string> v2;
for (size_t i = 0; i < 100; i++)
{
string url = "https://www.bilibili.com/"; // 用了相同的网址
url += std::to_string(456 + i); // 构造出100个不同的相似字符串
v2.push_back(url);
}
// 检测这100个不同的相似字符串是否在布隆过滤器中(按理来说应该不在)
size_t count1 = 0;
for (const auto& e : v2)
{
if (bf.test(e)) count1++; // 如果判断在,说明误判了
// 统计出有多少个字符串误判了
}
cout << "相似字符串的误判率:" << (double)count1 / (double)100 << endl;
}
2.5 BloomFilter的应用场景
布隆过滤器一般没有删除,因为布隆过滤器判断一个元素是会存在误判,此时无法保证要删除的元素在布隆过滤器中,如果此时将位图中对应的比特位清0,就会影响到其他元素了。这时候我们只需要在每个比特位加一个计数器,当存在插入操作时,在计数器里面进行++,删除后对该位置进行- -即可。但是布隆过滤器的本来目的就是为了提高效率和节省空间,在每个比特位增加额外的计数器,空间消耗那就更多了。
场景一:假设这里有一个网站,注册的时候需要每个用户取一个昵称,要求昵称不能重复。用户在注册的时候,输入一个昵称,系统需要判断一下这个昵称是否已被注册。
1.用户输入昵称点击提交后,先到后台数据库中去查,再返回判断这个昵称是否存在的结果。这种方式太麻烦了。
2.思考:那能不能当用户刚输入完昵称后,还没有点提交,切换到下一个输入框,这个时候就会提示用户,该昵称是否被占用。
解决思路
我们可以使用一个布隆过滤器,标记所有使用过的昵称,就能快速判断一个昵称是否被使用过。
这里虽然会存在误判,但在这种场景下,误判的影响并不大(因为判断一个昵称没被使用过,一定是准确的。判断一个昵称被使用过,可能存在误判,但没啥影响,大不了不用这个昵称了呗)
场景二:如果要求判断在或不在的结果都要是准确的,能否使用布隆过滤器呢?
也是可以的,比如验证一个手机号是否在系统中注册过,要求验证结果是准确的。
解决思路:使用一个布隆过滤器,标记所有注册过的手机号,判断这个手机号在不在布隆过滤器中:
1.如果不在,直接返回结果:未注册。
2.如果在,因为可能存在误判,所以再去服务器的数据库中查询,然后返回查询结果:未注册/已注册。
虽然查询效率降低了,但比起每次判断都去访问数据库,还是要高效不少。
有些服务器就会采用这种方式,来提高效率。
场景三:比如判断垃圾邮箱,垃圾邮箱的地址都会被标记映射到一个黑名单(布隆过滤器)中,当有人给你发邮件时,系统会快速判断出这个是否是垃圾邮件,然后进行拦截或分类。
- 系统判断这个邮件不在黑名单中,一定不会被拦截。
- 系统判断这个邮件在黑名单中,但这个邮件实际上可能不在黑名单中,误判了,把正常邮件拦截了,但影响不大,在垃圾箱还是能够找到这封正常邮件。
三、海量数据处理
3.1 哈希切割
1.给一个超过100G大小的log file(日志文件),log中存着IP地址,设计算法找到出现次数最多的IP地址?与上面的条件相同,如何找到topK的IP?如何直接用Linux系统命令实现?
解决思路:
此题不能用位图来处理了,因为位图处理的是整数,而IP地址是字符串(比如:192.0.0.1)
这里就需要用到[哈希切分],大文件我们处理不了,就想办法把他切分小文件处理。
假设我们有4G内存,我们就把这个大文件平均切分成500份小文件,每份200M,但是这种平均切分实际上是不行的,因为同一个IP可能进入了多份小文件中,想要统计出每个IP最终出现的次数都是非常麻烦的,更别说找到出现次数最多的那个IP地址了
那怎么办呢?使用哈希切分
切分操作:
- 先创建500个小文件,分别叫0、1、…、500
- 然后读取100G log file,依次获取每个IP地址,用字符串哈希算法,把IP地址转换成可以取模的整数(size_t),比如使用BKDR算法:
size_t num=BKDRHash(IP)%100
然后这个IP地址就放入(映射到)第num号小文件。依次对所有IP进行处理,进入(映射到)对应的小文件。
- 如果运气好一点,平均下来差不多每个小文件就是1G左右;如果运气不好,可能有些小文件是512MB,有些小文件是2G,但至少是相对可控的。
思考:如果最小的小文件num还是过大该怎么办呢?
我们可以限制一个大小,在处理操作之前,先检测一下当前小文件的大小,如果超过2G,就换一个哈希算法把当前小文件再切小一些。
处理操作:
- 依次读取每个小文件,比如先读取文件0中所有的IP,用map<string, int>统计所有IP出现的次数,这里统计的IP出现次数,就是这个IP最终出现的次数。我们记录下文件0中出现次数最多的IP
思考:这里为什么用了map呢?因为是小文件,内存消耗不大。
- 然后再clear()掉map中的元素,再读取文件1中所有的IP,继续统计所有IP出现的次数,不断走下去。
问题一:我们要找到出现次数最多的IP地址,在最开始记录下当前小文件中出现次数最多的IP地址,然后再读取后面小文件的过程中,不断更新这个IP地址,当最后一个小文件读取完,就找到出现次数最多的IP地址了。
问题二:如果要找到topK的IP地址,建立K个小数的小堆即可。
这里采用哈希切分的关键是:
- 相同的IP地址,一定会进入编号相同的小文件。
- 因为用字符串哈希算法,同一个IP地址转换出来的哈希位置一定是相同的。
可以理解为这里就是100个存着文件指针的哈希桶。
说明:
依次处理每个小文件,使用unordered_map/map统计ip出现次数
1.如果统计过程中,出现抛内存异常,则说明单个小文件过大,冲突太多,需要重新换哈希函数,再次哈希切分这个小文件
2.如果没有抛异常,则正常统计。统计完一个小文件,记录最大的。clear,再统计下一个小文件。
总结特点:
相同的IP一定进入相同小文件,读取单个小文件,就可以统计IP出现次数。
3.2 位图(只能处理整数)
1.给定100亿个整数,设计算法找到只出现一次的整数?
前面的题目是
- 在没排过序的海量数据中快速判断一个数在不在其中,是一个典型的key模型。
- 所以我们只需要用位图标记2中状态:存在或不存在,用一个比特位1/0来标记。
而这里是,在海量数据中找到只出现一次的数,不仅要判断这个数在不在,还要知道这个数的出现次数。
错误思路:
- 显然是不能把这100亿个整数存储在map/unordered_map(红黑树/哈希表)中
正确思路:
我们需要标记3种状态:不存在或出现一次或出现多次,则要用两个比特位来标记。- 因为两个比特位有4种表现形式00/01/10/11
- 00:表示这个数不存在,01:表示这个数只出现一次,10:表示这个数出现多次
然后遍历位图,找到所有01标记的位置,此位置映射的就是只出现一次的整数。那这里需要消耗多少空间呢?
这里要注意:虽然有100亿个整数,但并不是开100亿个比特位的表。
这100亿个unsigned int整数的取值范围都是0~ 2 32 2^{32} 232 -1(大约是42亿9千多万个整数),如果每个整数映射一个比特位,需要消耗( 2 32 2^{32} 232 -1)/8个字节≈5亿多个字节≈0.5GB的空间,则每个整数映射两个比特位,需要消耗1GB的空间。
具体做法:
方法一:用一个位图,用2个连续的比特位标识一个数
需要修改2个不同位置的比特的值,不方便
方法二:封装两个位图,用两个位图的同一个位置的2个比特位来标识一个数
所以修改两个位图的同一个位置的比特位的值就好了,还可以复用之前写的位图代码。

template<size_t N>
class twobitset
{
public:
void set(size_t x)
{
//00 -> 01
if (_bs1.test(x) == false
&& _bs2.test(x) == false)
{
_bs2.set(x);
}
else if (_bs1.test(x) == false
&& _bs2.test(x) == true)
{
//01 -> 10
_bs1.set(x);
_bs2.reset(x);
}
}
void Print()
{
for (size_t i = 0; i < N; ++i)
{
if (_bs2.test(i))
{
cout << i << endl;
}
}
}
public:
bitset<N> _bs1;
bitset<N> _bs2;
};
2.给两个文件,分别有100亿个整数,我们只有1G内存,如何找到两个文件交集?
分析问题:找到两个文件的交集,只需要判断这个数是否分别在两个文件中,是一个典型的key模型
解决思路:定义两个位图
- 位图1标识第一个文件中所有数的存在状态(1存在、0不存在)
- 位图2标识第二个文件中所有数的存在状态(1存在、0不存在)
- 遍历位图中的N个比特位,检测两个位图的同一个位置的比特位的值是否都为1,如果都为1,说明此位置映射的这个数就是交集。

需要消耗的内存:
因为unsigned int 整数的取值范围是0~
2
32
2^{32}
232 -1(大约是42亿9千多万个整数),每个整数映射一个比特位,需要消耗(
2
32
2^{32}
232 -1)/8个字节≈5亿多个字节≈0.5GB的空间,这里开了两个位图,需要消耗1GB的空间。
3.位图应用变形:1个文件有100亿个int,1GB内存,设计算法找到出现次数不超过2次的所有整数?
和问题一类似
解决思路:封装两个位图,用两个位图的同一个位置的2个比特位来标识一个数。
我们需要标记4种状态:不存在或出现一次或出现两次或出现多次
因为两个比特位有4种表现形式00/01/10//11,所以:
- 00 - 表示这个数不存在
- 01 - 表示这个数只出现1次
- 10 - 表示这个数出现2次
- 11 - 表示这个数出现2次及以上
然后遍历位图,找到所有不是11标记的位置,此位置映射的就是出现次数不超过2次的整数。
3.3 布隆过滤器
1.给两个文件,分别存有100亿个query(查询),我们只有1G内存,如何找到两个文件交集?分别给出精确算法和近似算法。
近似算法:把第一个文件中的100亿个查询插入布隆过滤器,再读取第二个文件,看当前查询在不在布隆过滤器中。如果不在,说明一定不是交集;如果在,说明可能是交集(因为存在误判)
精确算法:[哈希切分]
假设一个query平均50字节,则100亿个query大约是5000亿字节,则文件大约是占500G
第一步:
先创建999个小文件,分别叫A0、A1…A999
先创建999个小文件,分别叫B0、B1…B999
第二步:
依次读取A文件中的query,使用字符串哈希算法转成可以取模的整型:
- size_t=Hash(query)%200,把这个query放入到(映射到)第Ai号小文件中
依次读取B文件中的query,使用字符串哈希算法转成可以取模的整型:- size_t=Hash(query)%200,把这个query放入到(映射到)第Bi号小文件中
注意:平均下来,每个小文件是1G左右(可能有些文件大,有些文件小)
第二步结束后,文件中相同的query会分别进入编号相同的小文件,只需要去编号相同的小文件中找交集即可。
第三步:

第四步:
i=[0,999],把Ai读进setA中,Bi读进setB中,setA和setB相同的query就是交集。
核心思想:
源文件太大,存在磁盘中,直接读取去找交集效率太低,先切分成一个一个的小文件,然后再去读取小文件找交集。
产生的问题:因为不是平均切分,可能会出现冲突多,每个Ai,Bi小文件过大,–假设两个都是4-5G
1.单个文件中,有某个大量重复的query
2.单个文件中,有大量不同的query文章来源:https://www.toymoban.com/news/detail-835859.html
直接使用一个unordered_set/set,依次读取文件query,插入set中
1.如果读取整个小文件query,都可以成功插入set,那么说明情况1
2.如果读取整个小文件query,插入过程中抛异常,则是情况2,换其他哈希函数,再次分割,再求交集。
说明:set插入key,如果已经有了,返回false;如果没有内存,会抛bad_alloc异常,剩下的都会成功。文章来源地址https://www.toymoban.com/news/detail-835859.html
四、完整代码
4.1 bitset.h
#pragma once
#include <vector>
template <size_t N>
class bitset
{
public:
bitset()
{
_bits.resize(N / 8 + 1, 0);
}
void set(size_t x)
{
size_t i = x / 8;
size_t j = x % 8;
_bits[i] |= (1 << j);
}
void reset(size_t x)
{
size_t i = x / 8; //计算x映射的位在第i个char数组位置
size_t j = x % 8; //计算x映射的位在这个char的第j个比特位
_bits[i] &= ~(1 << j);
}
bool test(size_t x)
{
size_t i = x / 8;
size_t j = x % 8;
return _bits[i] & (1 << j);
}
private:
vector<char> _bits;
};
void test_bitset1()
{
bitset<100> bs;
bs.set(10);
bs.set(11);
bs.set(15);
cout << bs.test(10) << endl;
cout << bs.test(15) << endl;
bs.reset(10);
cout << bs.test(10) << endl;
cout << bs.test(15) << endl;
bs.reset(10);
bs.reset(15);
cout << bs.test(10) << endl;
cout << bs.test(15) << endl;
}
void test_bitset2()
{
//bitset<-1> bs1;
bitset<0xFFFFFFFF> bs1;
}
template<size_t N>
class twobitset
{
public:
void set(size_t x)
{
//00 -> 01
if (_bs1.test(x) == false
&& _bs2.test(x) == false)
{
_bs2.set(x);
}
else if (_bs1.test(x) == false
&& _bs2.test(x) == true)
{
//01 -> 10
_bs1.set(x);
_bs2.reset(x);
}
}
void Print()
{
for (size_t i = 0; i < N; ++i)
{
if (_bs2.test(i))
{
cout << i << endl;
}
}
}
public:
bitset<N> _bs1;
bitset<N> _bs2;
};
void test_twobitset()
{
int a[] = { 3,45,53,32,32,43,3,2,5,2,32,55,5,53,43,9,8,7 };
twobitset<100> bs;
for (auto e : a)
{
bs.set(e);
}
bs.Print();
}
4.2 boomfilter.h
#pragma once
#include <bitset>
#include<string>
struct BKDRHash
{
size_t operator()(const string& s)
{
size_t hash = 0;
for (auto ch : s)
{
hash += ch;
hash *= 31;
}
return hash;
}
};
struct APHash
{
size_t operator()(const string& s)
{
size_t hash = 0;
for (long i = 0; i < s.size(); i++)
{
size_t ch = s[i];
if ((i & 1) == 0)
{
hash ^= ((hash << 7) ^ ch ^ (hash >> 3));
}
else
{
hash ^= (~((hash << 11) ^ ch ^ (hash >> 5)));
}
}
return hash;
}
};
struct DJBHash
{
size_t operator()(const string& s)
{
size_t hash = 5381;
for (auto ch : s)
{
hash += (hash << 5) + ch;
}
return hash;
}
};
//N最多会插入key数据的个数
template<size_t N,class K=string ,class Hash1= BKDRHash, class Hash2= APHash, class Hash3= DJBHash>
class BloomFilter
{
public:
void set(const K& key)
{
size_t len = N * _X;
size_t hash1 = Hash1()(key) % len;
_bs.set(hash1);
size_t hash2 = Hash2()(key) % len;
_bs.set(hash2);
size_t hash3 = Hash3()(key) % len;
_bs.set(hash3);
cout << hash1 << " " << hash2 << " " << hash3 << endl;
}
bool test(const K& key)
{
size_t len = N * _X;
size_t hash1 = Hash1()(key) % len;
if (!_bs.test(hash1))
{
return false;
}
size_t hash2 = Hash2()(key) % len;
if (!_bs.test(hash2))
{
return false;
}
size_t hash3 = Hash3()(key) % len;
if (!_bs.test(hash3))
{
return false;
}
//在 不准确的,存在误判
//不在 准确的
return true;
}
private:
static const size_t _X = 4;
bitset <N*_X> _bs;
};
void test_bloomfilter()
{
BloomFilter<100> bs;
bs.set("sort");
bs.set("bloom");
bs.set("hello world");
bs.set("test");
bs.set("etst");
bs.set("estt");
cout << bs.test("sort") << endl;
cout << bs.test("bloom") << endl;
cout << bs.test("hello world") << endl;
cout << bs.test("test") << endl;
cout << bs.test("etst") << endl;
cout << bs.test("estt") << endl;
cout << bs.test("ssort") << endl;
cout << bs.test("tors") << endl;
}
4.3 test.cpp
#define _CRT_SECURE_NO_WARNINGS 1
#include <iostream>
#include<string>
using namespace std;
//#include "bitset.h"
//
//int main()
//{
// test_bitset1();
// //test_twobitset();
//
// return 0;
//}
#include"boomfilter.h"
int main()
{
test_bloomfilter();
return 0;
}
到了这里,关于C++进阶--哈希的应用之位图和布隆过滤器的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!






![【数据结构】盘点那些经典的 [哈希面试题]【哈希切割】【位图应用】【布隆过滤器】(10)](https://imgs.yssmx.com/Uploads/2024/02/764640-1.png)



